TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024144032
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023181565
出願日
2023-10-23
発明の名称
無人運転システム、制御装置、無人運転方法、移動体の製造方法および移動体
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
65/18 20060101AFI20241003BHJP(鉄道以外の路面車両)
要約
【課題】異常が生じている移動体によって第1作業よりも後の工程である第2作業が妨げられることを抑制する。
【解決手段】無人運転システムは、遠隔制御により移動可能な移動体と、移動体を遠隔制御する遠隔制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された移動体を、第2作業が実施される工場の第2場所に移動させる遠隔制御部と、生産設備の異常に関する情報と、移動体の異常に関する情報と、移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、異常情報を用いて、移動体に異常が生じているか否かを推定する推定部と、を備える。遠隔制御部は、異常が生じていると推定された移動体である被推定移動体を第1場所とも第2場所とも異なる工場の第3場所に移動させる。
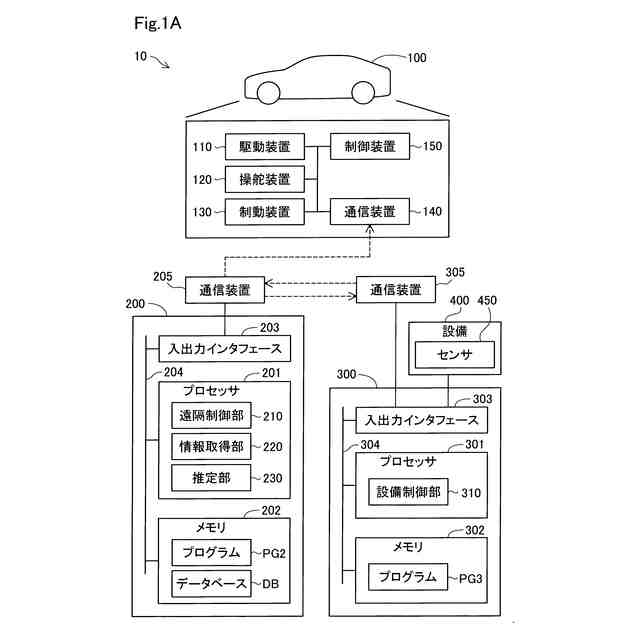
【選択図】図1A
特許請求の範囲
【請求項1】
無人運転システムであって、
遠隔制御により移動可能な移動体と、
前記移動体を遠隔制御する遠隔制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる遠隔制御部と、
前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、
前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定部と、
を備え、
前記遠隔制御部は、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる、無人運転システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の無人運転システムであって、
前記第3場所は、前記被推定移動体の異常を解消するための第3作業が実施される場所であり、
前記遠隔制御部は、前記第3場所において前記第3作業が実施された前記被推定移動体を前記第2場所に移動させる、無人運転システム。
【請求項3】
請求項1に記載の無人運転システムであって、
前記工場は、複数の第3場所を備え、
前記異常の種類と前記複数の第3場所の位置とが対応付けられたデータベースを記憶している記憶部をさらに備え、
前記遠隔制御部は、前記データベースを用いて、前記複数の第3場所の中から前記被推定移動体の移動先を決定する、無人運転システム。
【請求項4】
請求項1に記載の無人運転システムであって、
前記遠隔制御部は、前記被推定移動体が前記第2場所を経由して前記第3場所に移動する場合には、前記被推定移動体に前記第2作業を実施しないように前記第2場所に通知する、無人運転システム。
【請求項5】
制御装置であって、
移動体を遠隔制御する遠隔制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる遠隔制御部と、
前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、
前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定部と、
を備え、
前記遠隔制御部は、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる、制御装置。
【請求項6】
無人運転方法であって、
移動体を無人運転により移動させる無人運転工程であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる無人運転工程と、
前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得工程と、
前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定工程と、
を備え、
前記無人運転工程では、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる、無人運転方法。
【請求項7】
移動体の製造方法であって、
工場の第1場所において生産設備を用いて移動体に第1作業を実施する第1作業工程と、
前記移動体を無人運転により移動させる無人運転工程であって、前記第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる無人運転工程と、
前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得工程と、
前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定工程と、
前記第2場所において前記移動体に前記第2作業を実施する第2作業工程と、
を備え、
前記無人運転工程では、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる、移動体の製造方法。
【請求項8】
移動体であって、
前記移動体の無人運転を実行する制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる制御部と、
前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、
前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定部と、
を備え、
前記制御部は、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる、移動体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人運転システム、制御装置、無人運転方法、移動体の製造方法および移動体に関する。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
車両の製造工程において、自動運転により車両を走行させる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両等の移動体の製造工程において、前工程の作業場所から後工程の作業場所まで無人運転により移動体を移動させる場合に、異常が生じている移動体によって後工程が妨げられる可能性がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1の形態によれば、無人運転システムが提供される。この無人運転システムは、遠隔制御により移動可能な移動体と、前記移動体を遠隔制御する遠隔制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる遠隔制御部と、前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定部と、を備える。前記遠隔制御部は、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる。
この形態の無人運転システムによれば、異常が生じていると推定された被推定移動体を第2場所ではなく第3場所に移動させることができる。したがって、異常が生じている移動体によって第2場所における第2作業が妨げられることを抑制できる。
(2)上記形態の無人運転システムにおいて、前記第3場所は、前記被推定移動体の異常を解消するための第3作業が実施される場所であり、前記遠隔制御部は、前記第3場所において前記第3作業が実施された前記被推定移動体を前記第2場所に移動させてもよい。
この形態の無人運転システムによれば、第3場所において異常が解消された被推定移動体を遠隔制御により第2場所に移動させることができる。
(3)上記形態の無人運転システムにおいて、前記工場は、複数の第3場所を備え、前記異常の種類と前記複数の第3場所の位置とが対応付けられたデータベースを記憶している記憶部をさらに備え、前記遠隔制御部は、前記データベースを用いて、前記複数の第3場所の中から前記被推定移動体の移動先を決定してもよい。
この形態の無人運転システムによれば、異常の種類に応じて被推定移動体の移動先を決定することができる。
(4)上記形態の無人運転システムにおいて、前記遠隔制御部は、前記被推定移動体が前記第2場所を経由して前記第3場所に移動する場合には、前記被推定移動体に前記第2作業を実施しないように前記第2場所に通知してもよい。
この形態の無人運転システムによれば、被推定移動体に第2作業が実施されることを抑制できる。
(5)本開示の第2の形態によれば、制御装置が提供される。この制御装置は、移動体を遠隔制御する遠隔制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる遠隔制御部と、前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定部と、を備える。前記遠隔制御部は、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる。
この形態の制御装置によれば、異常が生じていると推定された被推定移動体を第2場所ではなく第3場所に移動させることができる。したがって、異常が生じている移動体によって第2場所における第2作業が妨げられることを抑制できる。
(6)本開示の第3の形態によれば、無人運転方法が提供される。この無人運転方法は、移動体を無人運転により移動させる無人運転工程であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる無人運転工程と、前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得工程と、前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定工程と、を備える。前記無人運転工程では、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる。
この形態の無人運転方法によれば、異常が生じていると推定された被推定移動体を第2場所ではなく第3場所に移動させることができる。したがって、異常が生じている移動体によって第2場所における第2作業が妨げられることを抑制できる。
(7)本開示の第4の形態によれば、移動体の製造方法が提供される。この移動体の製造方法は、工場の第1場所において生産設備を用いて移動体に第1作業を実施する第1作業工程と、前記移動体を無人運転により移動させる無人運転工程であって、前記第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる無人運転工程と、前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得工程と、前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定工程と、前記第2場所において前記移動体に前記第2作業を実施する第2作業工程と、を備える。前記無人運転工程では、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる。
この形態の移動体の製造方法によれば、異常が生じていると推定された被推定移動体を第2場所ではなく第3場所に移動させることができる。したがって、異常が生じている移動体によって第2場所における第2作業が妨げられることを抑制できる。
(8)本開示の第5の形態によれば、移動体が提供される。この移動体は、前記移動体の無人運転を実行する制御部であって、工場の第1場所において生産設備を用いて第1作業が実施された前記移動体を、第2作業が実施される前記工場の第2場所に移動させる制御部と、前記生産設備の異常に関する情報と、前記移動体の異常に関する情報と、前記移動体と同種の移動体の異常に関する情報とのうちの少なくとも一つを含む異常情報を取得する情報取得部と、前記異常情報を用いて、前記移動体に異常が生じているか否かを推定する推定部と、を備える。前記制御部は、異常が生じていると推定された前記移動体である被推定移動体を前記第1場所とも前記第2場所とも異なる前記工場の第3場所に移動させる。
この形態の移動体によれば、異常が生じていると推定された被推定移動体を第2場所ではなく第3場所に移動させることができる。したがって、異常が生じている移動体によって第2場所における第2作業が妨げられることを抑制できる。
本開示は、無人運転システム、制御装置、無人運転方法、移動体の製造方法、および、移動体以外の種々の形態で実現することも可能である。例えば、移動体製造システム、コンピュータプログラム、および、コンピュータプログラムが記録された記録媒体などの形態で実現することができる。
【図面の簡単な説明】
【0007】
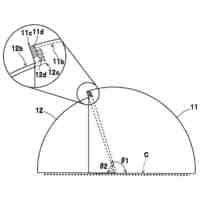
第1実施形態の無人運転システムの構成を示す説明図。
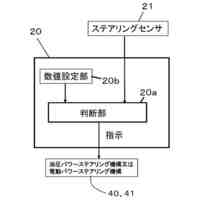
第1実施形態の車両制御装置の構成を示す説明図。
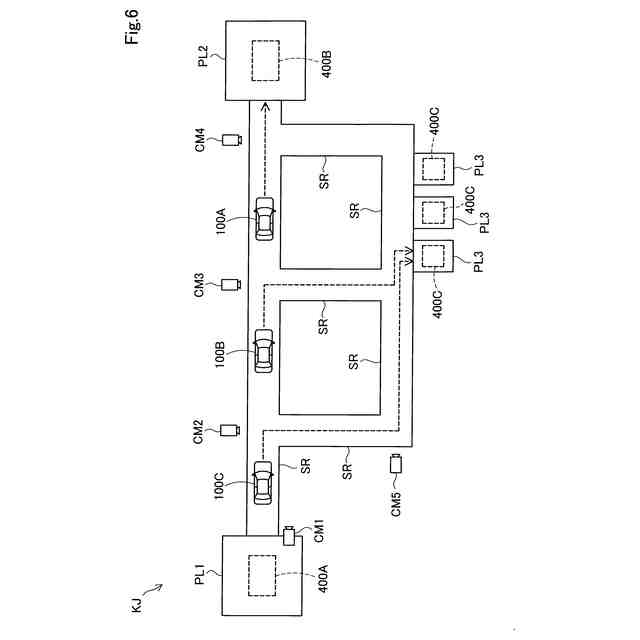
工場の構成を模式的に示す説明図。
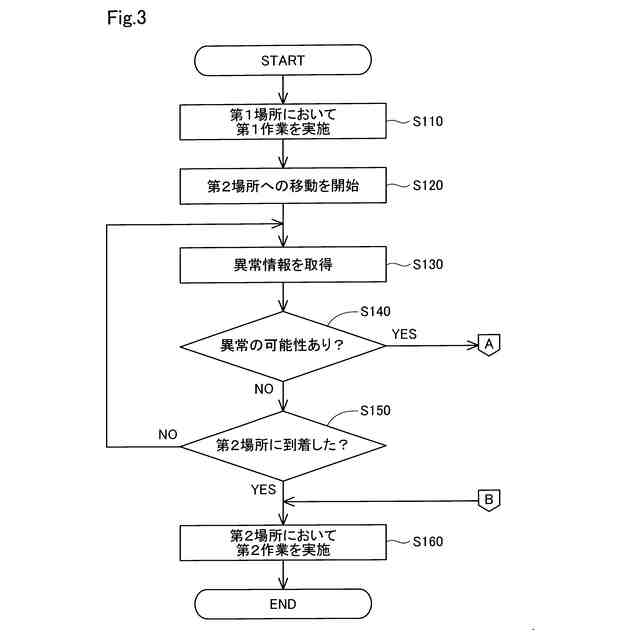
第1実施形態の車両の走行制御の手順を示すフローチャート。
車両の製造方法の内容を示す第1のフローチャート。
車両の製造方法の内容を示す第2のフローチャート。
遠隔制御により車両が走行する様子を示す第1の説明図。
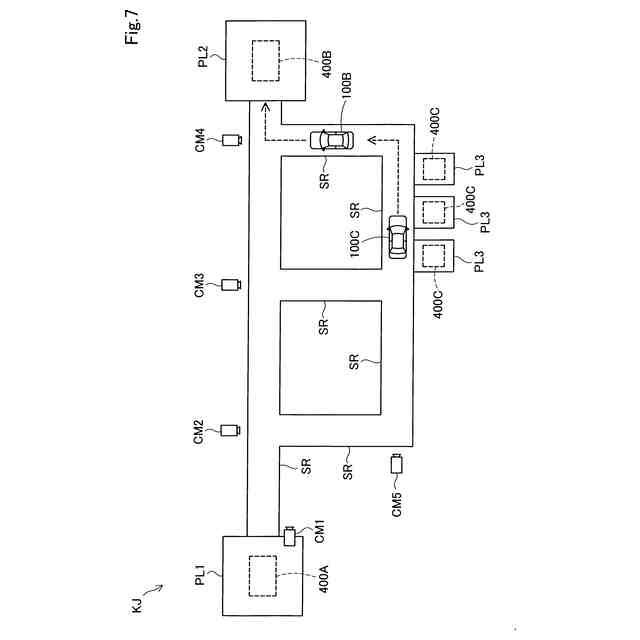
遠隔制御により車両が走行する様子を示す第2の説明図。
遠隔制御により車両が走行する様子を示す第3の説明図。
第2実施形態の無人運転システムの構成を示す説明図。
第2実施形態の車両制御装置の構成を示す説明図。
第2実施形態の車両の走行制御の手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1Aは、第1実施形態における無人運転システム10の構成を示す説明図である。無人運転システム10は、移動体を製造する工場において、未完成の移動体、換言すれば、製造中の移動体を無人運転により移動させるために用いられる。
【0009】
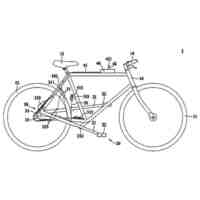
本開示において、「移動体」は、移動し得る物体を意味し、例えば、車両や電動垂直離着陸機(いわゆる空飛ぶ自動車)である。車両は、車輪によって走行する車両であっても無限軌道によって走行する車両であってもよく、例えば、乗用車、トラック、バス、二輪車、四輪車、戦車、工事用車両などである。車両は、電気自動車(BEV:Battery Electric Vehicle)、ガソリン自動車、ハイブリッド自動車、ならびに燃料電池自動車を含む。移動体が車両以外である場合には、本開示における「車両」「車」との表現を、適宜に「移動体」に置き換えることができ、「走行」との表現を、適宜に「移動」に置き換えることができる。
【0010】
「無人運転」とは、搭乗者の走行操作によらない運転を意味する。走行操作とは、車両100の「走る」、「曲がる」、「止まる」の少なくともいずれかに関する操作を意味する。無人運転は、車両100の外部に位置する装置を用いた自動または手動の遠隔制御によって、あるいは、車両100の自律制御によって実現される。無人運転によって走行している車両100には、走行操作を行わない搭乗者が搭乗していてもよい。走行操作を行わない搭乗者には、例えば、単に車両100の座席に着座している人や、組み付け、検査、スイッチ類の操作といった走行操作とは異なる作業を車両100に乗りながら行っている人が含まれる。なお、搭乗者の走行操作による運転は、「有人運転」と呼ばれることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
8か月前
個人
サドル揺動装置
10か月前
個人
重量物移動台車
5か月前
個人
自転車用荷台
2か月前
井関農機株式会社
作業機
7か月前
井関農機株式会社
作業機
9か月前
個人
車両用横転防止装置
7か月前
日本精機株式会社
表示装置
8か月前
個人
クリアレインシェード
6か月前
三甲株式会社
保護具
7か月前
井関農機株式会社
作業車両
4か月前
個人
スライドレインプルーフ
4か月前
株式会社クラベ
面状ユニット
4か月前
個人
ステアリングの操向部材
2か月前
株式会社ホシプラ
台車
6か月前
株式会社北誠商事
被覆構造体
8か月前
帝人株式会社
車両構造体
4か月前
祖峰企画株式会社
平台車
3か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
8か月前
三甲株式会社
台車
1か月前
三甲株式会社
台車
1か月前
井関農機株式会社
走行車両
7か月前
井関農機株式会社
作業車両
9か月前
個人
足踏みペダル式自転車
4か月前
ダイハツ工業株式会社
車両
16日前
ヤマハ発動機株式会社
車両
7か月前
豊田合成株式会社
ハンドル
9か月前
豊田合成株式会社
ハンドル
5か月前
株式会社オカムラ
カート装置
5か月前
株式会社オカムラ
カート装置
5か月前
アルインコ株式会社
運搬台車
4か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車
2か月前
アルインコ株式会社
運搬台車
4か月前
THK株式会社
操舵装置
6か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ