TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024005666
公報種別
公開特許公報(A)
公開日
2024-01-17
出願番号
2022105940
出願日
2022-06-30
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
B62D
6/00 20060101AFI20240110BHJP(鉄道以外の路面車両)
要約
【課題】作業走行中の状況に応じて操向操作の負荷を変更することが出来る作業車両を提供する。
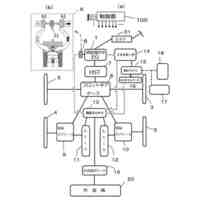
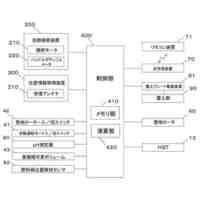
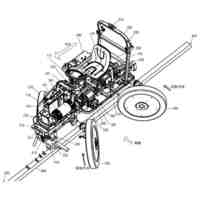
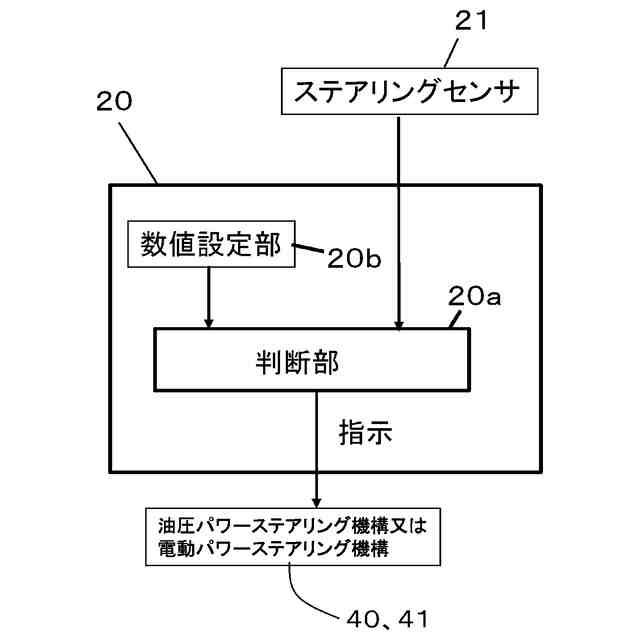
【解決手段】走行車体と、走行車体の進行方向を変更する操舵輪と、操舵輪を操作するステアリングホイールと、ステアリングホイールの操作を検出するステアリングセンサ21と、ステアリングホイールの操作荷重を変更する制御部20と、を備え、圃場における作業時において、制御部20は、ステアリングセンサ21の検出値により、ステアリングホイールの旋回操作がなされたと判断すると旋回操作の非検出時よりもステアリングホイールの操作荷重を軽くすることを特徴とする作業車両。
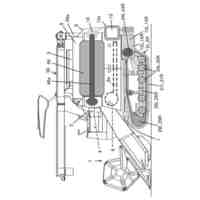
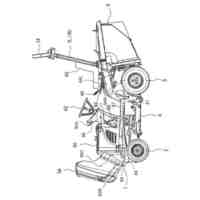
【選択図】図3
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体の進行方向を変更する操舵輪と、
前記操舵輪を操作するステアリングホイールと、
前記ステアリングホイールの操作を検出するステアリングセンサと、
前記ステアリングホイールの操作荷重を変更する制御部と、を備え、
圃場における作業時において、
前記制御部は、前記ステアリングセンサの検出値により、前記ステアリングホイールの旋回操作がなされたと判断すると前記旋回操作の非検出時よりも前記ステアリングホイールの操作荷重を軽くすることを特徴とする作業車両。
続きを表示(約 830 文字)
【請求項2】
前記ステアリングセンサにより前記ステアリングホイールの操作の角速度を検出し、前記制御部は前記角速度が予め設定した所定の値を上回ると旋回操作であると判断する、請求項1記載の作業車両。
【請求項3】
前記ステアリングホイールの操作角度が所定の有効角度以上になると前記操舵輪の角度が変更し始める構造であって、前記制御部は前記有効角度未満の範囲内で、前記旋回操作か否かを判断し、前記有効角度以上の範囲においては、前記旋回操作の判断を行わない、請求項2記載の作業車両。
【請求項4】
前記ステアリングホイールの操作角度が所定の有効角度以上になると前記操舵輪の角度が変更し始める構造であって、
前記制御部は前記有効角度未満の範囲内では、前記ステアリングホイールの旋回操作がなされたと判断すると前記旋回操作の非検出時よりも前記ステアリングホイールの操作荷重を軽くし、
前記制御部は前記有効角度以上の範囲内では、前記ステアリングホイールの旋回操作がなされたと判断すると前記旋回操作の非検出時よりも前記ステアリングホイールの操作荷重を予め決められたルールに従って段階的にあるいは連続的に徐々に荷重を軽くする、請求項2記載の作業車両。
【請求項5】
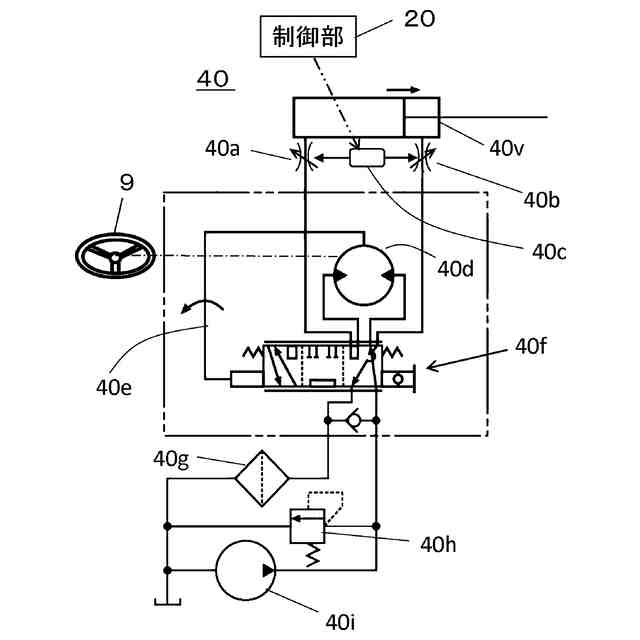
前記ステアリングホイールによる前記操舵輪の操作には油圧パワーステアリング機構が用いられており、
前記制御部は、前記油圧パワーステアリング機構の油圧回路を制御することによって前記ステアリングホイールの操作荷重を変更する、請求項1記載の作業車両。
【請求項6】
前記ステアリングホイールによる前記操舵輪の操作には電動モータによる電動パワーステアリング機構が用いられており、
前記制御部は、前記電動パワーステアリング機構を制御することによって前記ステアリングホイールの操作荷重を変更する、請求項1記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクターなどの作業車両に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、作業車両は一般道路等を走行する場合と作業走行する場合とでは操向時の負荷がかなり異なるため、不慣れな運転者は一般道路等を走行するときに作業走行時と同様にステアリング操作をしてしまい車体を左右に大きくふらつかせることがある。
【0003】
そこで、従来、作業モードと非作業モードとでモードを切り替えるモード切り替えスイッチを備え、非作業モードが選択されているときは作業モードが選択されている時よりもステアリング操作速度に対する操向輪の操向速度を遅く設定する作業車両が公知である(先行文献1)。
【0004】
このような作業車両により非作業時のふらつきを抑制できる。
【先行技術文献】
【特許文献】
【0005】
特開平10-109660号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、作業車両においては、作業中においても操向操作の負荷が変動することが望ましい場合があるが、上記技術では作業走行中の状況に応じて操向操作の負荷を変更することは出来ない。
【0007】
本発明では、作業走行中に状況に応じて操向操作の負荷を適切に変更できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、
走行車体と、
前記走行車体の進行方向を変更する操舵輪と、
前記操舵輪を操作するステアリングホイールと、
前記ステアリングホイールの操作を検出するステアリングセンサと、
前記ステアリングホイールの操作荷重を変更する制御部と、を備え、
圃場における作業時において、
前記制御部は、前記ステアリングセンサの検出値により、前記ステアリングホイールの旋回操作がなされたと判断すると前記旋回操作の非検出時よりも前記ステアリングホイールの操作荷重を軽くすることを特徴とする作業車両である。
【0009】
第2の本発明は、
前記ステアリングセンサにより前記ステアリングホイールの操作の角速度を検出し、前記制御部は前記角速度が予め設定した所定の値を上回ると旋回操作であると判断する、第1の本発明の作業車両である。
【0010】
第3の本発明は、
前記ステアリングホイールの操作角度が所定の有効角度以上になると前記操舵輪の角度が変更し始める構造であって、前記制御部は前記有効角度未満の範囲内で、前記旋回操作か否かを判断し、前記有効角度以上の範囲においては、前記旋回操作の判断を行わない、第2の本発明の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業機
17日前
井関農機株式会社
収穫機
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
26日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
苗移植機
26日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
乗用芝刈機
16日前
井関農機株式会社
コンバイン
18日前
井関農機株式会社
コンバイン
18日前
井関農機株式会社
コンバイン
16日前
井関農機株式会社
炊飯用洗米装置
2日前
井関農機株式会社
電動作業車の安全装置
1か月前
井関農機株式会社
移植機
16日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
籾摺選別機
9日前
井関農機株式会社
精米機の管理システム
3日前
個人
自転車の傘
10か月前
個人
重量物移動台車
7か月前
個人
自転車用傘捕捉具
25日前
井関農機株式会社
作業機
10か月前
個人
車両用横転防止装置
8か月前
井関農機株式会社
作業機
8か月前
個人
体重掛けリフト台車
3日前
個人
自転車用荷台
4か月前
個人
クリアレインシェード
7か月前
井関農機株式会社
作業車両
5か月前
個人
自転車用荷物台
9日前
日本精機株式会社
表示装置
9か月前
三甲株式会社
保護具
8か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ