TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024113158
公報種別
公開特許公報(A)
公開日
2024-08-21
出願番号
2024093717,2022181774
出願日
2024-06-10,2016-12-13
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20240814BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
直進走行の基準データが誤操作で取得されることを防止できる作業車両を提供することを目的とする。
【解決手段】
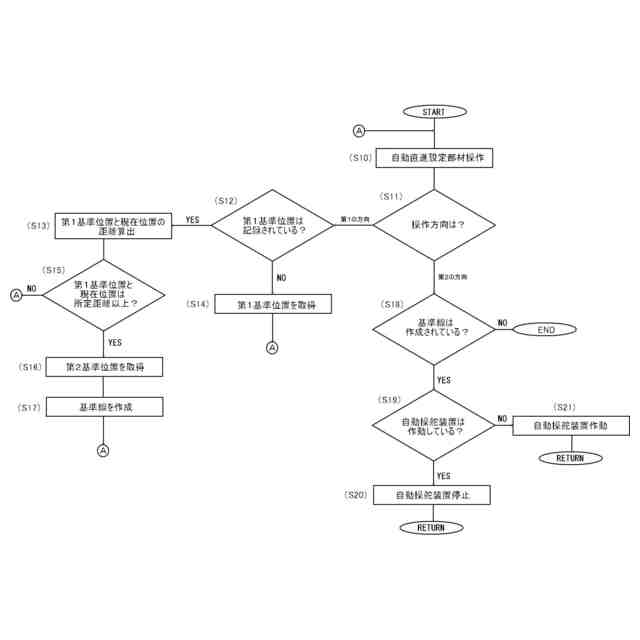
機体を操舵操作する操舵部材と、機体の位置座標を取得する位置情報取得装置と、操舵部材を作動させて機体を直進走行させる自動直進装置と、機体各部の制御を行う制御装置を備える作業車両において、機体の直進走行の基準となる基準位置を取得できる操作具を設け、基準位置は、圃場の一点で操作具によって取得される第1基準位置と、圃場の他点で操作具によって取得される第2基準位置の少なくとも二ヵ所からなり、操作具によって、第2基準位置を取得する際に、第1基準位置を取得した位置からの距離が所定距離未満であるときは、第2基準位置を取得できない、第1基準位置と第2基準位置を取得した状態で操作具を第1の方向に操作することによって第1基準位置と第2基準位置は削除できることを特徴とする。
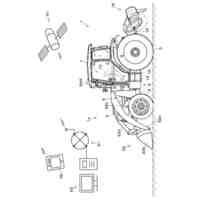
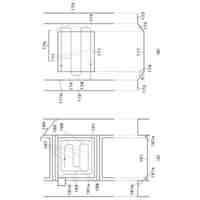
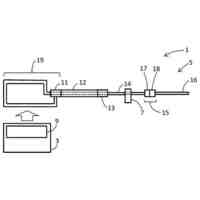
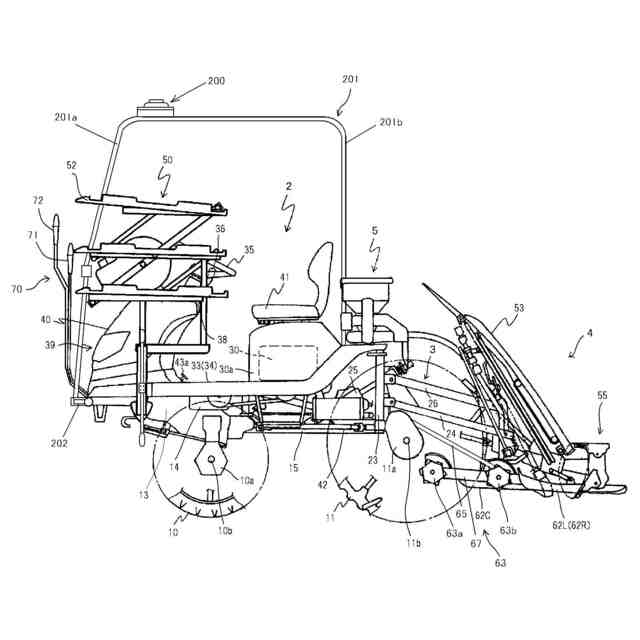
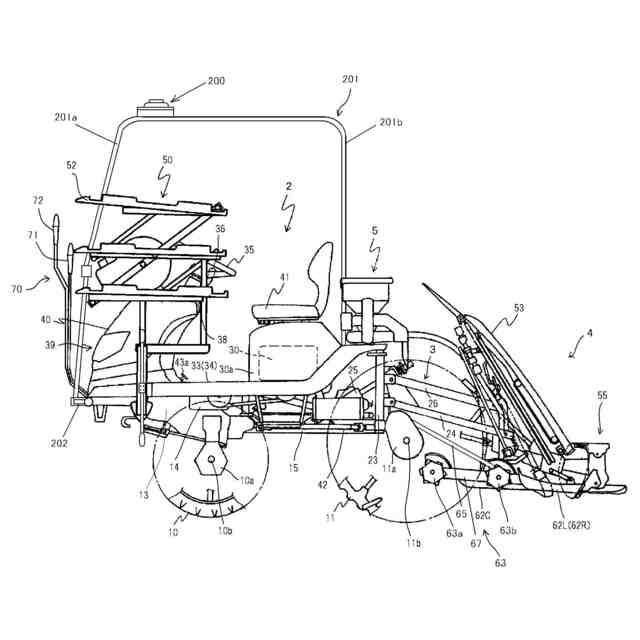
【選択図】図1
特許請求の範囲
【請求項1】
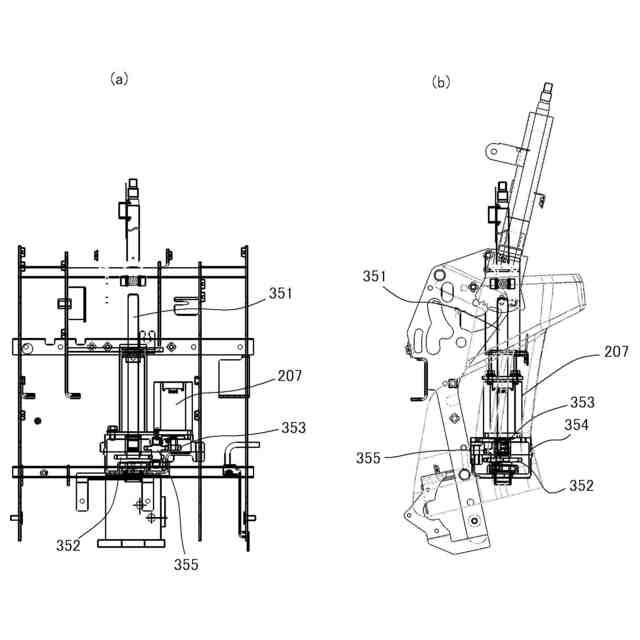
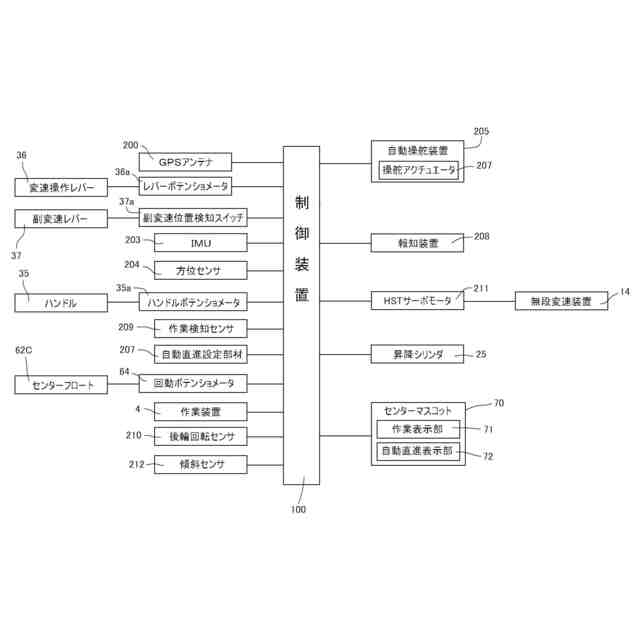
機体を操舵操作する操舵部材(35)と、機体の位置座標を取得する位置情報取得装置(200)と、前記操舵部材(35)を作動させて機体を直進走行させる自動直進装置(205)と、機体各部の制御を行う制御装置(100)を備える作業車両において、
機体の直進走行の基準となる基準位置を取得できる操作具を設け、
前記基準位置は、圃場の一点で前記操作具によって取得される第1基準位置(A)と、圃場の他点で前記操作具によって取得される第2基準位置(B)の少なくとも二ヵ所からなり、
前記操作具によって、前記第2基準位置(B)を取得する際に、前記第1基準位置(A)を取得した位置からの距離が所定距離未満であるときは、前記第2基準位置(B)を取得できない、
前記第1基準位置(A)と第2基準位置(B)を取得した状態で前記操作具を第1の方向に操作することによって前記第1基準位置(A)と前記第2基準位置(B)は削除できることを特徴とする作業車両。
続きを表示(約 310 文字)
【請求項2】
前記自動走行の入り切り操作を行う操作部を設け、
前記操作部はレバー部材であり、前記レバー部材を第2の方向に操作すると前記自動直進装置(205)による自動直進走行が「入」になることを特徴とする請求項1に記載の作業車両。
【請求項3】
自動直進走行が「入」であるときに前記レバー部材を操作すると前記自動直進装置(205)が「切」になり、
前記第1基準位置(A)を取得した状態で、前記第2基準位置(B)を取得せずに前記操舵部材(35)を操作し、機体を旋回させると前記制御装置(100)は、取得した前記第1基準位置(A)を削除することを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場内を走行し、走行車体に走行した作業装置で対地作業を行う作業車両に関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来の作業車両には、作業開始位置と作業終了位置の位置情報を、作業装置が入切されたときに取得し、取得した作業開始位置と作業終了位置から基準線を作成し、この基準線に沿ってハンドルを自動操舵し、機体を直進走行させる自動操舵装置を備えるものがある。(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開2016- 21890号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された作業車両は、作業装置が入切された位置を作業開始位置及び作業終了位置として取得することができるので、作業開始位置及び作業終了位置を取得する操作が必要なく、操作性がよいという利点がある。
【0005】
しかしながら、誤操作により作業装置の入または切が行われると、本来作業開始位置、または作業終了位置を取得すべき位置とは異なる位置で作業開始位置、または作業終了位置が取得されてしまうことがある。このときは、基準データを別の作業条で取り直す必要があり、その間は自動操舵装置が使用できず、精度の高い作業走行が行えない問題がある。
【0006】
本発明は、上記の問題を解消し、直進走行の基準位置が誤操作で取得されることを防止できる作業車両を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
請求項1記載の発明は、機体を操舵操作する操舵部材(35)と、機体の位置座標を取得する位置情報取得装置(200)と、前記操舵部材(35)を作動させて機体を直進走行させる自動直進装置(205)と、機体各部の制御を行う制御装置(100)を備える作業車両において、
機体の直進走行の基準となる基準位置を取得できる操作具を設け、
前記基準位置は、圃場の一点で前記操作具によって取得される第1基準位置(A)と、圃場の他点で前記操作具によって取得される第2基準位置(B)の少なくとも二ヵ所からなり、
前記操作具によって、前記第2基準位置(B)を取得する際に、前記第1基準位置(A)を取得した位置からの距離が所定距離未満であるときは、前記第2基準位置(B)を取得できない、
前記第1基準位置(A)と第2基準位置(B)を取得した状態で前記操作具を第1の方向に操作することによって前記第1基準位置(A)と前記第2基準位置(B)は削除できることを特徴とする作業車両とした。
【0008】
請求項2記載の発明は、前記自動走行の入り切り操作を行う操作部を設け、
前記操作部はレバー部材であり、前記レバー部材を第2の方向に操作すると前記自動直進装置(205)による自動直進走行が「入」になることを特徴とする請求項1に記載の作業車両とした。
【0009】
請求項3記載の発明は、自動直進走行が「入」であるときに前記レバー部材を操作すると前記自動直進装置(205)が「切」になり、
前記第1基準位置(A)を取得した状態で、前記第2基準位置(B)を取得せずに前記操舵部材(35)を操作し、機体を旋回させると前記制御装置(100)は、取得した前記第1基準位置(A)を削除することを特徴とする請求項1または2に記載の作業車両とした。
【発明の効果】
【0010】
請求項1の発明により、取得した基準位置に基づき機体を自動直進させることができるので、走行軌跡が直線状に揃えられ、作業精度が向上する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
草抜き機
1か月前
個人
ルアー
20日前
個人
動物撃退装置
1か月前
個人
殺虫スプレー
6日前
個人
播種機と播種方法
21日前
井関農機株式会社
作業車両
6日前
個人
蔬菜栽培器
1か月前
個人
集積ゴミ用保護網
1か月前
個人
植物支持装置
21日前
個人
回転式草刈刃
1か月前
株式会社誠和
接触構造体
6日前
個人
動物の尿漏れ防止具
9日前
個人
有害獣類の忌避装置
今日
個人
植物栽培装置
21日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
6日前
株式会社ブリーデン
ルアー
20日前
株式会社天装
猫の爪研ぎ具
今日
日産化学株式会社
農薬粒状組成物
今日
株式会社広瀬
植物の育成方法
27日前
松山株式会社
農作業機
1か月前
有限会社トオヤ
魚釣り用ウキ
22日前
松山株式会社
農作業機
1か月前
株式会社土と野菜
芝生マット
1か月前
井関農機株式会社
営農管理システム
1か月前
松山株式会社
農作業機
22日前
環境事業計画株式会社
動物用罠
今日
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
水分量測定装置
1か月前
中国電力株式会社
蜂の巣除去装置
1か月前
株式会社シマノ
魚釣用電動リール
1か月前
株式会社ミラミラ
愛犬被服用型紙
1か月前
東京都公立大学法人
摘み取り装置
27日前
株式会社拓凌
動物捕獲用罠
今日
株式会社クボタ
収穫機
1か月前
有限会社オーエスピー商会
罠システム
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ