TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172610
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090443
出願日
2023-05-31
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
79/00 20060101AFI20241205BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】専用の均平作業機を使用せずに圃場の均平作業を行うこと。
【解決手段】走行車体(1a)に支持されて、圃場(302)内での農作業が可能であると共に圃場(302)の整地も可能な作業機(22)と、測位装置(SN3)の3次元の測位結果に基づいて、各位置(302a)の高さが平均高さに近づくように作業機(22)の高さを調整する調整手段(203)と、を備えることで、専用の均平作業機を使用せずに圃場の均平作業を行うことができる。
【選択図】図1
特許請求の範囲
【請求項1】
走行車体(1a)と、
前記走行車体(1a)に支持されて、圃場(302)内での農作業が可能であると共に圃場(302)の整地も可能な作業機(22)と、
前記走行車体(1a)の3次元の位置を測位する測位装置(SN3)と、
前記走行車体(1a)が圃場(302)内を走行した時の前記測位装置(SN3)の測位結果に基づいて、圃場(302)の各位置(302a)における高さと平均高さとを計測する高さ計測手段(201)と、
前記平均高さに対する前記圃場(302)の各位置(302a)における高さに基づいて、前記各位置(302a)の高さが平均高さに近づくように前記作業機(22)の高さを調整する調整手段(203)と、
を備えたことを特徴とする作業車両。
続きを表示(約 340 文字)
【請求項2】
前記走行車体(1a)に支持されて測位用の人工衛星(41)との通信で測位を行う前記測位装置(SN3)と、
前記走行車体(1a)の前方に配置されて、土砂を収容可能なバケット(22b)と、前記バケット(22b)の角度を調整可能且つ前記走行車体(1a)に対する角度を調整可能なアーム(22a)と、を有する前記作業機(22)と、
前記平均高さに対する前記圃場(302)の各位置における高さに基づいて、前記バケット(22b)の前記アーム(22a)に対する角度と、前記アーム(22a)の前記走行車体(1a)に対する角度とを調整することで、前記作業機(22)の高さを調整する前記調整手段(203)と、
を備えたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、トラクタや整地用のローダ、ブルドーザー等の作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
米穀や小麦、野菜等の作物が植えられる圃場において、トラクタ(10)に設置されたGPS受信機(20)での測定結果に応じて、トラクタ(10)の後側に配置された均平機(30)を一定の高さに保持しながら牽引することで、運土して、圃場の全体を均平にする技術が公知である(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第4739860号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の従来の技術では、専用の均平機が必要である問題がある。一度、均平作業をすると次回の均平作業までに相当の年数、期間が空くことが多く、使用頻度の低い専用の均平機を準備すると、購入費用の問題や使用後の均平機を倉庫で保管する保管費用の問題等もある。
【0005】
本発明は、専用の均平作業機を使用せずに圃場の均平作業を行うことを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、走行車体(1a)と、前記走行車体(1a)に支持されて、圃場(302)内での農作業が可能であると共に圃場(302)の整地も可能な作業機(22)と、前記走行車体(1a)の3次元の位置を測位する測位装置(SN3)と、前記走行車体(1a)が圃場(302)内を走行した時の前記測位装置(SN3)の測位結果に基づいて、圃場(302)の各位置(302a)における高さと平均高さとを計測する高さ計測手段(201)と、前記平均高さに対する前記圃場(302)の各位置(302a)における高さに基づいて、前記各位置(302a)の高さが平均高さに近づくように前記作業機(22)の高さを調整する調整手段(203)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記走行車体(1a)に支持されて測位用の人工衛星(41)との通信で測位を行う前記測位装置(SN3)と、前記走行車体(1a)の前方に配置されて、土砂を収容可能なバケット(22b)と、前記バケット(22b)の角度を調整可能且つ前記走行車体(1a)に対する角度を調整可能なアーム(22a)と、を有する前記作業機(22)と、前記平均高さに対する前記圃場(302)の各位置における高さに基づいて、前記バケット(22b)の前記アーム(22a)に対する角度と、前記アーム(22a)の前記走行車体(1a)に対する角度とを調整することで、前記作業機(22)の高さを調整する前記調整手段(203)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【発明の効果】
【0008】
請求項1記載の発明によれば、圃場(302)の各位置(302a)の高さが平均高さに近づくように農作業が可能な作業機(22)の高さを調整することで、専用の均平作業機を使用せずに圃場の均平作業を行うことができる。
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、走行車体(1a)の前方のバケット(22b)を有する作業機で均平作業を行うことができる。
【図面の簡単な説明】
【0009】
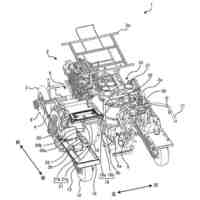
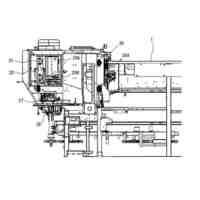
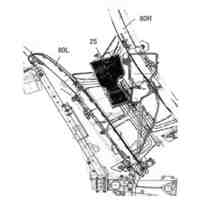
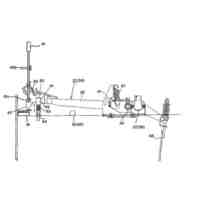
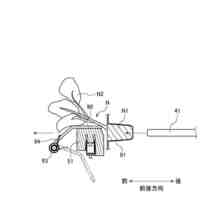
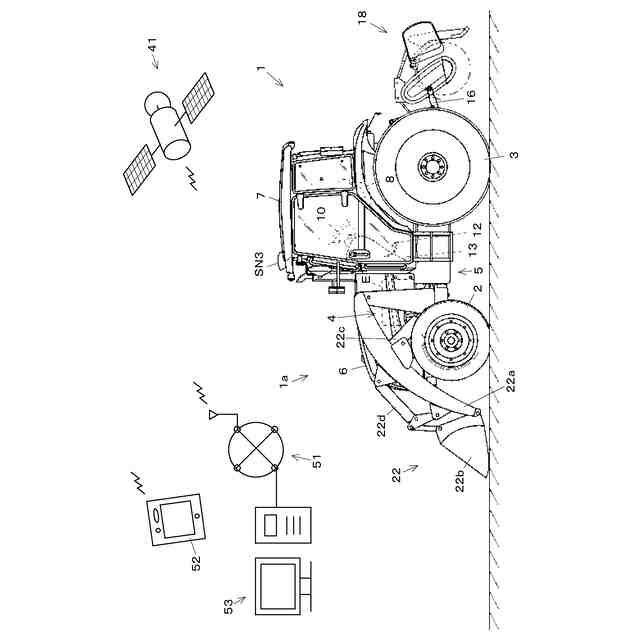
図1は実施の形態の作業車両の一例としてのトラクタの説明図であり、作業機としてロータリ耕耘機が装着された状態の説明図である。
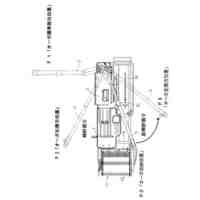
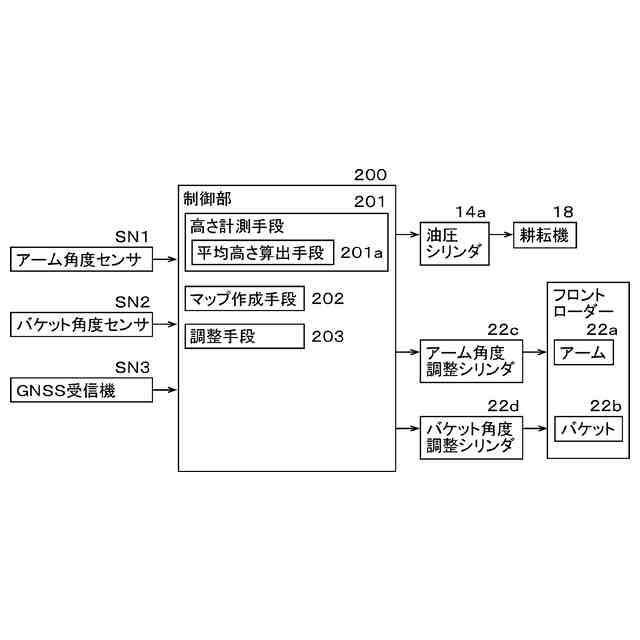
図2は実施の形態の制御部の機能ブロック図である。
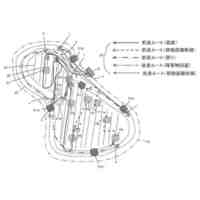
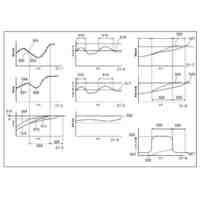
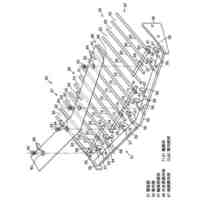
図3は実施の形態の圃場の高さマップの一例の説明図である。
図4は図3のマップにおいて均平作業計画を策定する一例の説明図である。
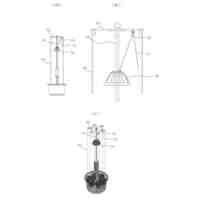
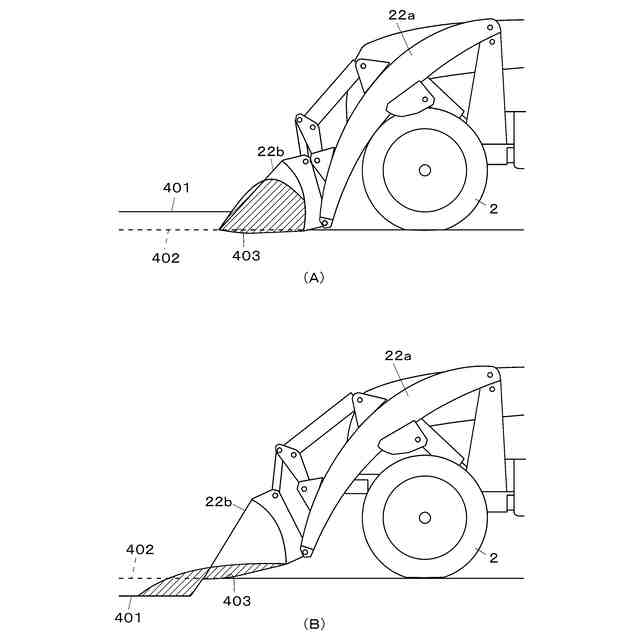
図5は実施の形態のトラクタのフロントローダの高さの説明図であり、図5(A)は平均高さよりも高い場所での説明図、図5(B)は平均高さよりも低い場所での説明図である。
【発明を実施するための形態】
【0010】
図1は実施の形態の作業車両の一例としてのトラクタの説明図であり、作業機としてロータリ耕耘機が装着された状態の説明図である。
図1において、本発明の作業車両の一例としての耕耘用のトラクタ1は、走行車体1aの前後部に前輪2,2と後輪3,3とを備え、走行車体前部のエンジンルーム4内に搭載したエンジンEの回転動力をトランスミッションケース5内の変速装置によって適宜減速して、これらを前輪2,2と後輪3,3に伝えるように構成している。前記エンジンルーム4はボンネット6で覆う構成である。
なお、本明細書ではトラクタ1の前進方向に向かって左右をそれぞれ左側と右側といい、前進方向を前側、後進方向を後側という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
11日前
井関農機株式会社
精米設備
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
コンバイン
25日前
井関農機株式会社
コンバイン
25日前
井関農機株式会社
収穫作業機
19日前
井関農機株式会社
コンバイン
25日前
井関農機株式会社
乗用型苗植機
25日前
井関農機株式会社
乗用型苗移植機
25日前
井関農機株式会社
多条植付用の苗移植機
19日前
井関農機株式会社
コンバインの穀粒排出装置
11日前
井関農機株式会社
苗マット取り出しシステム
27日前
井関農機株式会社
植物工場の生産流通システム
18日前
井関農機株式会社
散布作業機
4日前
井関農機株式会社
コンバイン
11日前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
乗用型苗植機
4日前
井関農機株式会社
苗マット取り出し装置
27日前
井関農機株式会社
作業車両
19日前
個人
植裁物への水やり装置
25日前
タキイ種苗株式会社
レタス植物
1か月前
みのる産業株式会社
移植機
15日前
みのる産業株式会社
移植機
15日前
松山株式会社
収穫機
18日前
株式会社ロッソ
植物栽培器
29日前
株式会社ロッソ
植物栽培器
29日前
株式会社大貴
動物用トイレ
18日前
個人
害獣生体捕獲狭域収容システム
1日前
三菱マヒンドラ農機株式会社
作業車両
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ