TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019685
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123422
出願日
2023-07-28
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20250131BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場の畦際における旋回の精度を向上できる作業車両を提供すること。
【解決手段】実施形態の一態様に係る作業車両は、走行車体と、衛星測位装置と、位置検出装置と、制御装置とを備える。走行車体は、圃場を走行可能である。衛星測位装置は、走行車体の車体位置を測位する。位置検出装置は、車体位置に対する圃場の畦位置を所定範囲内で検出可能である。制御装置は、予め設定した予定走行経路に沿うように走行車体を自動走行させる。制御装置は、2辺以上の畦の畦位置に基づいて車体位置を算出可能であり、位置検出装置により、2辺以上の畦の畦位置が検出されるとともに、走行車体がいずれか1辺の畦から所定距離内に位置することが検出される場合に、衛星測位装置により測位される車体位置よりも、2辺以上の畦の畦位置に基づいて算出される車体位置を優先して走行車体を自動走行させる。
【選択図】図6
特許請求の範囲
【請求項1】
圃場を走行可能である走行車体と、
前記走行車体の車体位置を測位する衛星測位装置と、
前記車体位置に対する前記圃場の畦位置を所定範囲内で検出可能である位置検出装置と、
予め設定した予定走行経路に沿うように前記走行車体を自動走行させる制御装置と、を備え、
前記制御装置は、
2辺以上の畦の畦位置に基づいて前記車体位置を算出可能であり、
前記位置検出装置により、2辺以上の畦の畦位置が検出されるとともに、前記走行車体がいずれか1辺の畦から所定距離内に位置することが検出される場合に、
前記衛星測位装置により測位される前記車体位置よりも、前記2辺以上の畦の畦位置に基づいて算出される前記車体位置を優先して前記走行車体を自動走行させる作業車両。
続きを表示(約 520 文字)
【請求項2】
前記走行車体から前記圃場の所定位置までの距離を計測する距離計測装置を備え、
前記位置検出装置は、撮像装置を含んで構成され、
前記撮像装置は、前記畦と当該畦の圃場内側の土壌部とを含む画像を撮像し、
前記制御装置は、
前記畦と前記土壌部とを含む画像上で、前記畦と前記土壌部との境界を前記圃場の端として認識し、
前記距離計測装置により計測される前記走行車体から前記所定位置である前記圃場の端までの距離に基づいて、前記走行車体が旋回可能となる旋回開始位置を算出し、当該旋回開始位置から前記走行車体を自動旋回させる請求項1に記載の作業車両。
【請求項3】
作物を収穫する収穫部を備え、
前記撮像装置は、前記作物を含む画像を撮像し、
前記制御装置は、
前記作物を含む画像上で、前記作物の位置を認識し、
旋回後の前記収穫部の前方に前記作物が位置するように前記走行車体を自動旋回させ、
旋回後の前記車体位置と前記予定走行経路とのズレがある場合に、旋回後の前記車体位置に合わせて前記予定走行経路を補正する請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、複数台の作業車両を少なくとも1台の作業車両で伴走する車両伴走システムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-95420号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の従来技術では、衛星測位装置を利用して予定走行経路に沿うように自車両を自動走行させる。また、作業車両の旋回中においては、撮像装置を利用して自車両に対する他車両の相対距離が一定となるような制御を行う。
【0005】
ここで、作業車両の旋回を伴う作業において、できるだけ圃場の畔に近接する位置で作業車両を旋回させて作業を行いたいという要望がある。しかしながら、作業車両が近接する畦際において、畦の崩落などによる環境変更の可能性がある。上記の従来技術では、衛星測位装置を利用して予定走行経路に沿うように自動走行させる場合に、当該環境変更に対応できないおそれがある。また、衛星測位装置は、畦際に高木が近くにある場合などに、測位の精度が十分に高いものではない。
【0006】
本発明は、上記に鑑みてなされたものであって、圃場の畦際における旋回の精度を向上できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
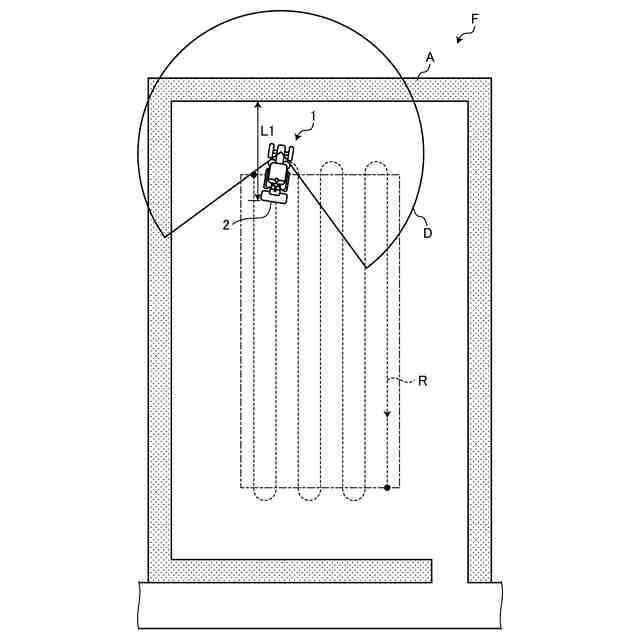
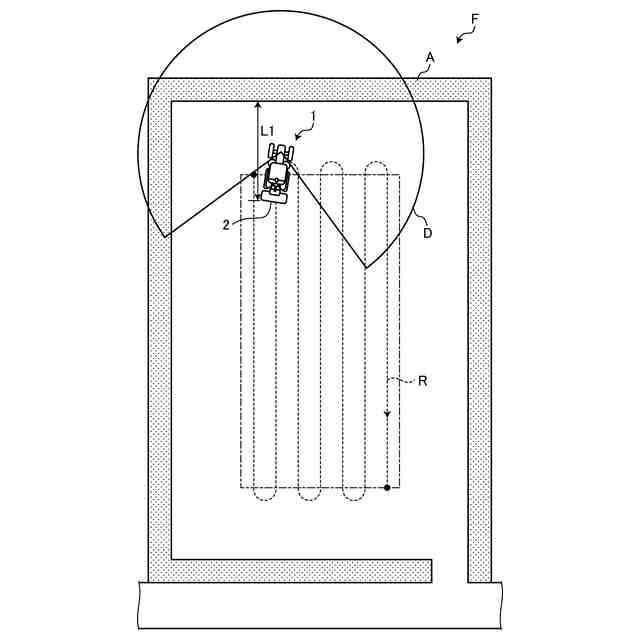
上述した課題を解決し、目的を達成するために、圃場を走行可能である走行車体(2)と、前記走行車体(2)の車体位置を測位する衛星測位装置(30)と、前記車体位置に対する前記圃場(F)の畦位置を所定範囲内で検出可能である位置検出装置(20)と、予め設定した予定走行経路(R)に沿うように前記走行車体を自動走行させる制御装置(40)と、を備え、前記制御装置(40)は、2辺以上の畦(A)の畦位置に基づいて前記車体位置を算出可能であり、前記位置検出装置(20)により、2辺以上の畦(A)の畦位置が検出されるとともに、前記走行車体がいずれか1辺の畦(A)から所定距離(L1)内に位置することが検出される場合に、前記衛星測位装置(30)により測位される前記車体位置よりも、前記2辺以上の畦(A)の畦位置に基づいて算出される前記車体位置を優先して前記走行車体(2)を自動走行させる。
【発明の効果】
【0008】
実施形態に係る作業車両によれば、圃場の畦際における旋回の精度を向上できる。
【図面の簡単な説明】
【0009】
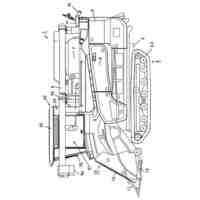
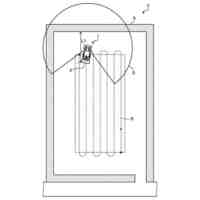
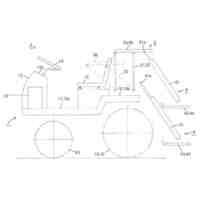
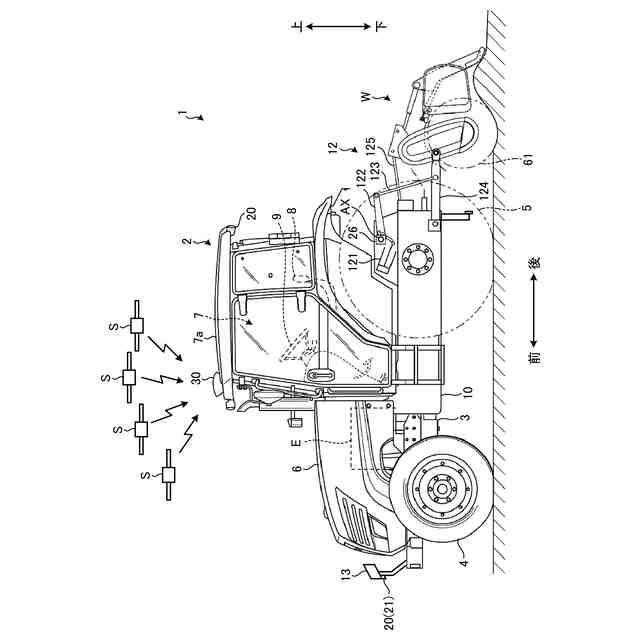
図1は、第1実施形態に係る作業車両の概略左側面図である。
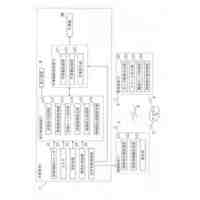
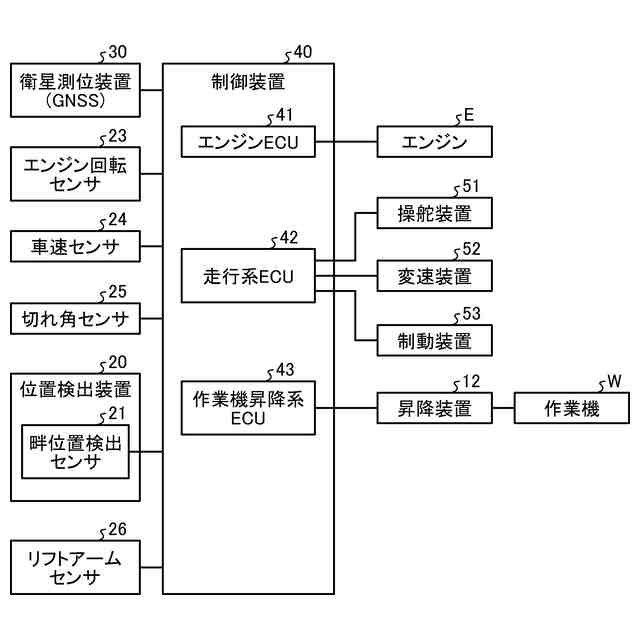
図2は、トラクタの制御系の一例を示すブロック図である。
図3は、予定走行経路に沿って自動走行するトラクタを示す図である。
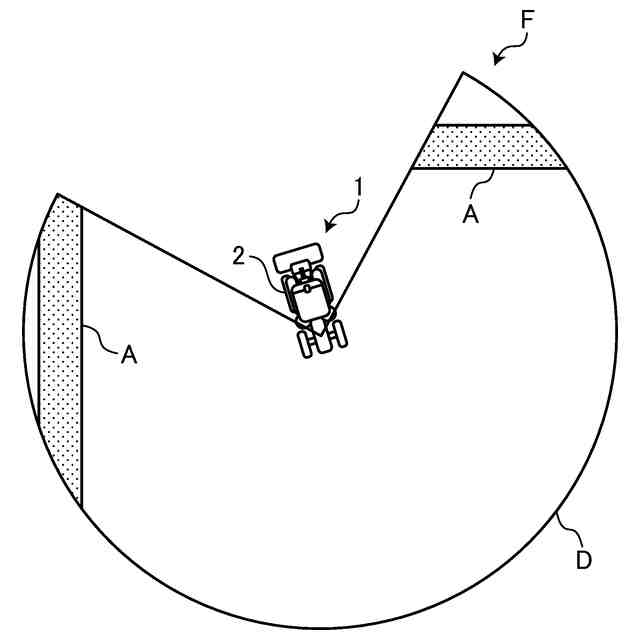
図4は、畦位置に基づく車体位置の算出を説明する図である。
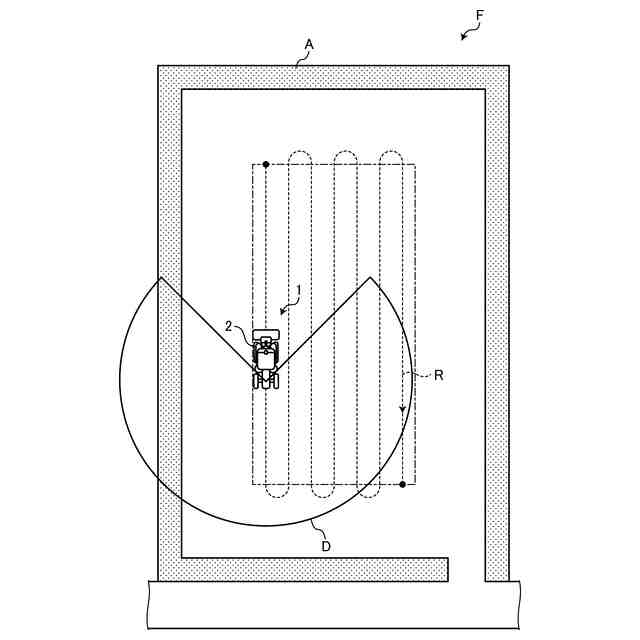
図5は、直進中のトラクタの自動走行を説明する図である。
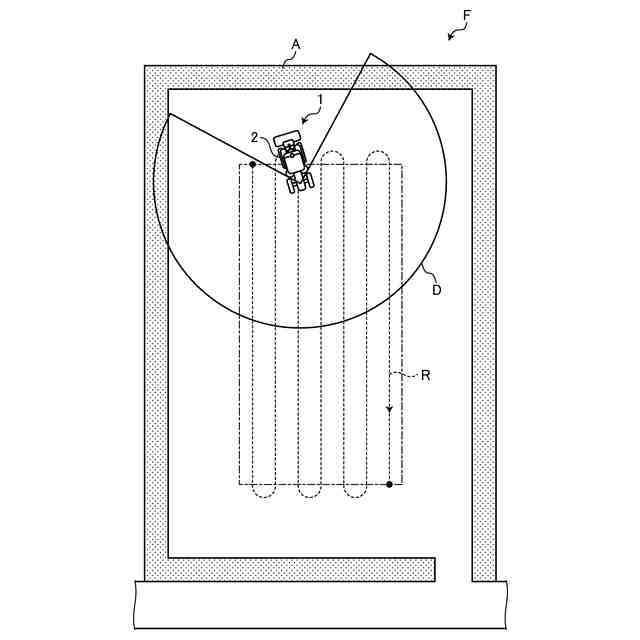
図6は、旋回中のトラクタの自動走行を説明する図である。
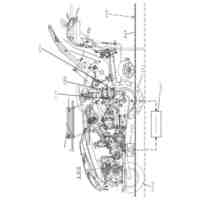
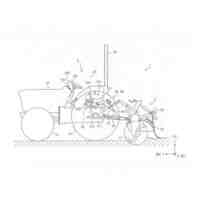
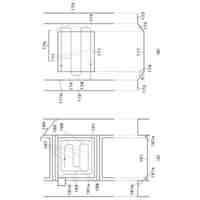
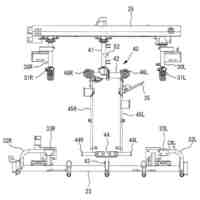
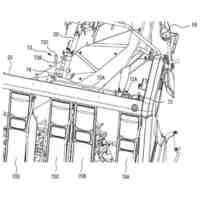
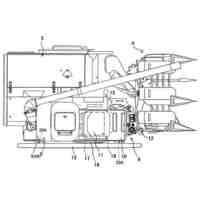
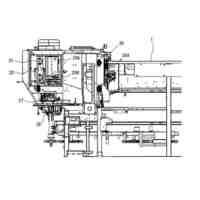
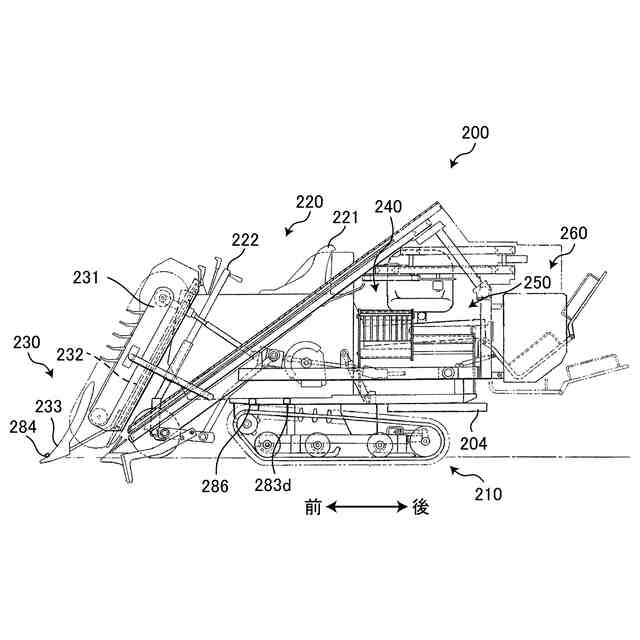
図7は、第2実施形態に係る作業車両の概略左側面図である。
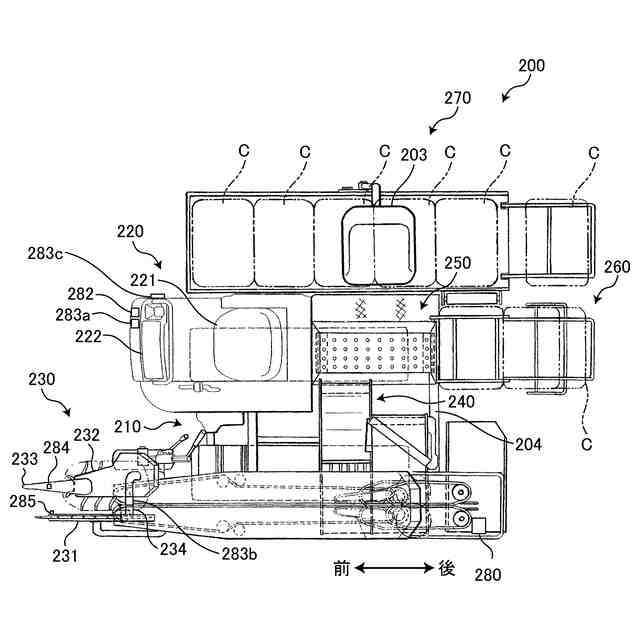
図8は、第2実施形態に係る作業車両の概略平面図である。
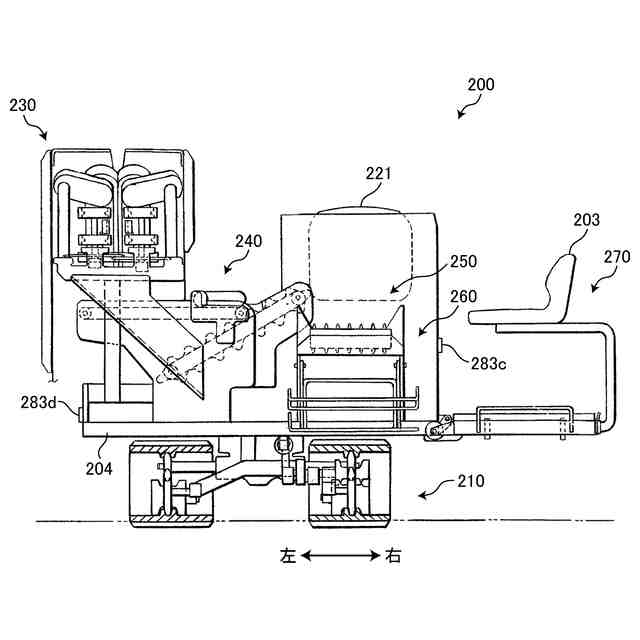
図9は、第2実施形態に係る作業車両の概略背面図である。
図10は、根菜類収穫機の制御系の一例を示すブロック図である。
図11は、予定走行経路に沿って自動走行する根菜類収穫機を示す図である。
図12は、撮像装置が撮像した画像の一例を示す図である。
図13は、撮像装置が撮像した画像の一例を示す図である。
図14は、根菜類収穫機の自動旋回を説明する図である。
図15は、予定走行経路の補正を説明する図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
26日前
井関農機株式会社
収穫機
26日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
苗移植機
26日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
5日前
井関農機株式会社
コンバイン
5日前
井関農機株式会社
コンバイン
5日前
井関農機株式会社
乗用型苗植機
5日前
井関農機株式会社
洗米炊飯装置
19日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
乗用型苗移植機
5日前
井関農機株式会社
ロボット作業車両
28日前
井関農機株式会社
ロボット作業車両
1か月前
井関農機株式会社
苗マット取り出しシステム
7日前
井関農機株式会社
ハイブリッドエンジン装置
1か月前
井関農機株式会社
SCRシステムおよび尿素水タンク
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ