TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179715
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023098768
出願日
2023-06-15
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01B
69/00 20060101AFI20241219BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 動く障害物に対して、自動走行時の安全性をより向上できる自動走行システムを提供する。
【解決手段】
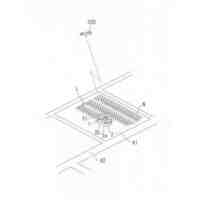
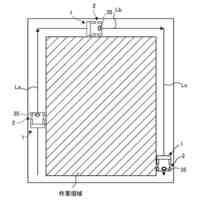
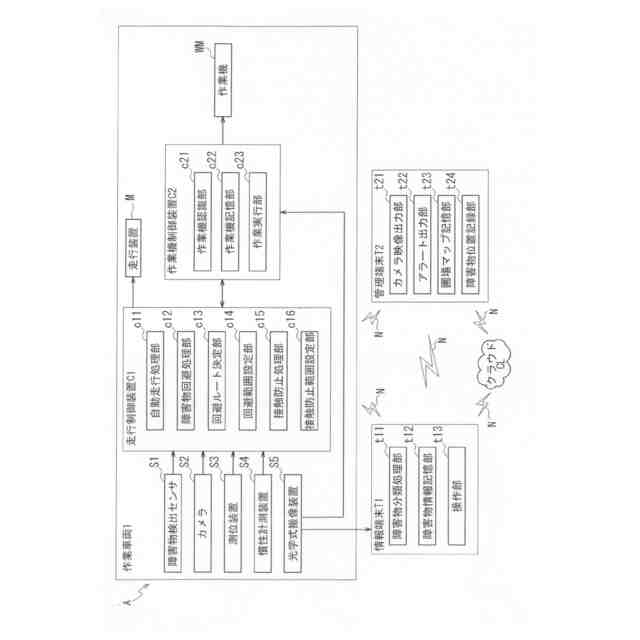
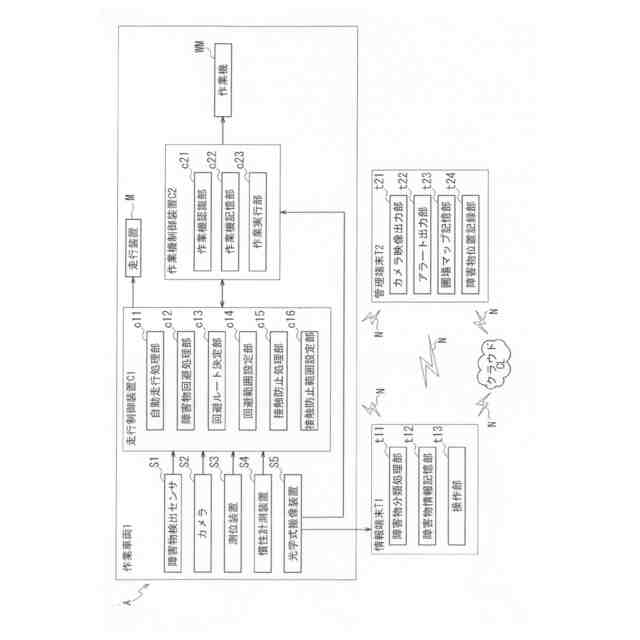
圃場内の作業車両を自動走行させる自動走行システムAであって、
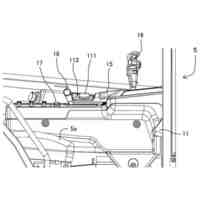
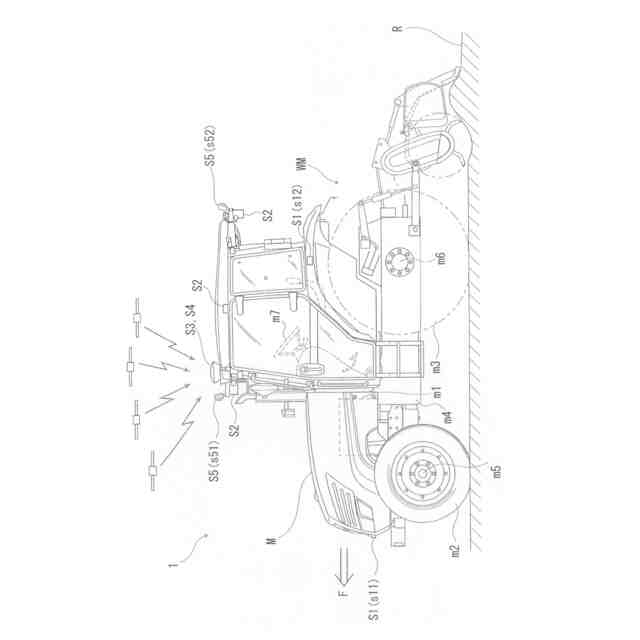
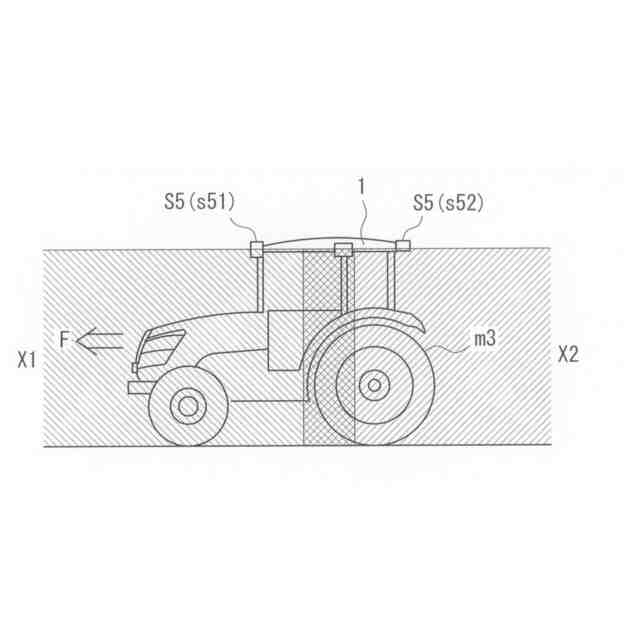
作業車両1は、障害物を検出する障害物検出センサS1と、障害物検出センサS1によって検出された障害物の位置及び形状を示す三次元撮像情報を取得可能な光学式撮像装置S5とを備え、
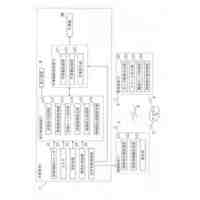
三次元撮像画像情報から検出された障害物の分類を行う障害物分類処理部t11を備え、
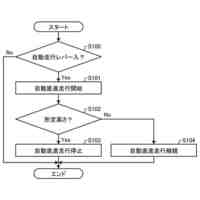
障害物分類処理部t11は、検出された障害物を、移動しない障害物と、移動する障害物とに分類し、
障害物分類処理部t11による障害物の分類結果に応じて、自動走行時における障害物の回避ルートL2を変更可能に構成されたことを特徴とする自動走行システムAによって、上記課題が解決される。
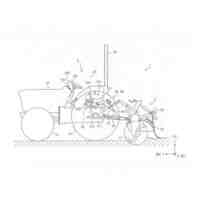
【選択図】 図1
特許請求の範囲
【請求項1】
圃場内の作業車両を自動走行させる自動走行システムであって、
前記作業車両は、障害物を検出する障害物検出センサと、前記障害物検出センサによって検出された障害物の位置及び形状を示す三次元撮像情報を取得可能な光学式撮像装置とを備え、
前記三次元撮像画像情報から検出された障害物の分類を行う障害物分類処理部を備え、
障害物分類処理部は、前記検出された障害物を、移動しない障害物と、移動する障害物とに分類し、
前記障害物分類処理部による障害物の分類結果に応じて、自動走行時における障害物の回避ルートを変更可能に構成されたことを特徴とする自動走行システム。
続きを表示(約 770 文字)
【請求項2】
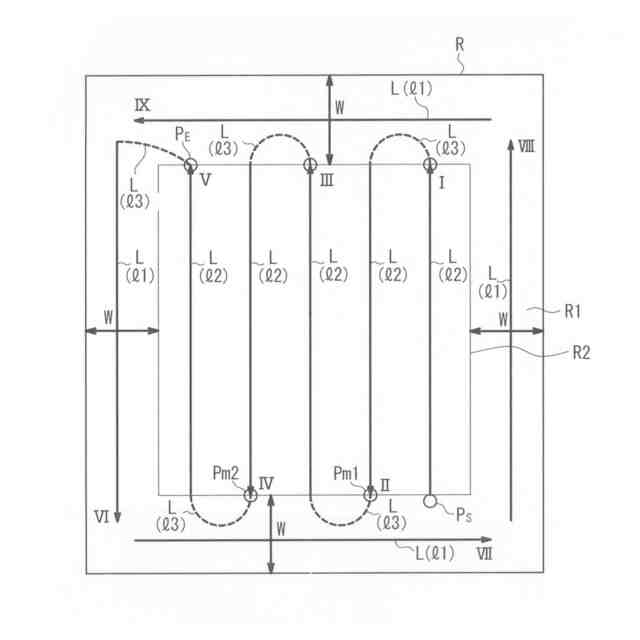
前記回避ルートを決定する回避ルート決定部と、
障害物の回避範囲を設定可能な回避範囲設定部とを備え、
前記回避ルート決定部は、前記回避範囲設定部によって設定された回避範囲に基づき回避ルートを決定するように構成され、
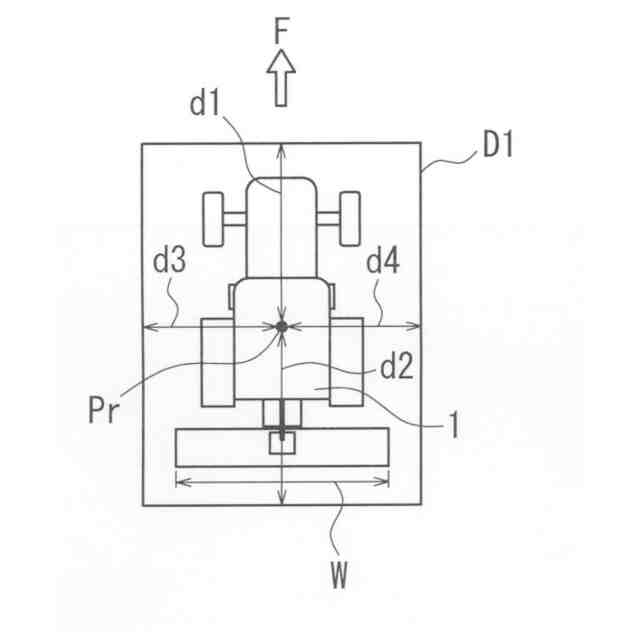
前記回避範囲は、前記作業車両の機体の中心基準位置に対して、前方回避距離、後方回避距離、左方回避距離、右方回避距離をそれぞれ設定することにより画定される矩形の領域となっていることを特徴とする請求項1に記載の自動走行システム。
【請求項3】
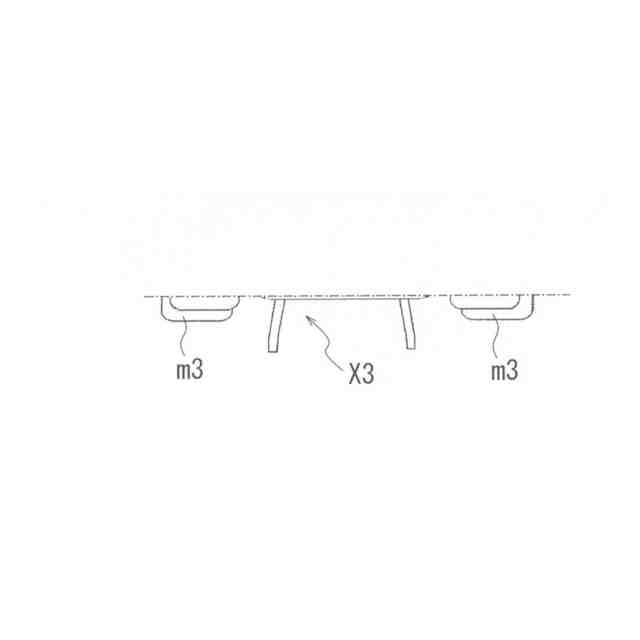
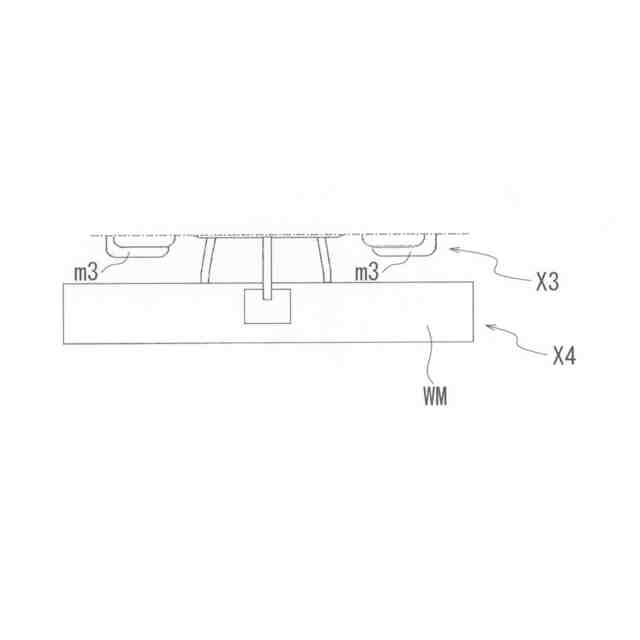
前記作業車両は、装着された作業機の形状に関する情報を、前記三次元撮像情報から取得することで、前記装着された作業機の種類を自動認識するよう構成され、
これにより、前記装着された作業機の作業幅を算出し、算出された作業幅に基づいて、前記回避範囲を設定するよう構成されたことを特徴とする請求項2に記載の作業車両。
【請求項4】
障害物との接触を防止する接触防止処理部を備え、
前記接触防止処理部は、自動走行中、設定された走行減速範囲に障害物が侵入すると、障害物が前記走行減速範囲外に移動するまで前記作業車両を減速させ、また、設定された走行停止範囲に障害物が侵入すると、走行停止範囲外に障害物が移動するまで、前記作業車両を停止させるよう構成されたことを特徴とする請求項1から請求項3のいずれか1項に記載の自動走行システム。
【請求項5】
回避ルート決定部は、自動走行時の作業車両の走行速度に応じて、回避ルートの回避角度を、走行速度が所定速度よりも速い場合に、より鈍角とし、また所定速度よりも遅い場合に、より鋭角とするよう構成されたことを特徴とする請求項2に記載の自動走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を自動走行させる自動走行システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、農業のスマート化のニーズが益々高まっており、作業車両の技術分野においては、GPS等の測位衛星システムを利用し、圃場内において、作業車両を無人操縦により自動走行させ、農作業を行う取り組みがなされている。
【0003】
従来の自動走行システムは、例えば、下記特許文献1に示されるように、作業開始前に、圃場内を一巡する目標走行経路が設定され、自動走行中においては、所定の時間間隔で、作業車両の現在位置を示す位置情報を取得し、設定された目標走行経路に対する自車位置の偏差(方位及び距離のズレ)を算出するよう構成されており、算出された偏差に基づいてステアリングハンドルを自動操舵することで、目標走行経路に沿うように作業車両が自動走行する仕組みとなっている。
【0004】
また、特許文献2には、自動走行中に、作業車両が障害物を検出した場合に、障害物を回避する新たな回避経路を生成し、これにより、作業車両が、自動で障害物を回避して自動走行を継続できるようにした自動走行システムが開示されている。
【先行技術文献】
【特許文献】
【0005】
特開平11-266608号公報
特開2022-94624号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記特許文献2に記載のような従来の自動走行システムは、障害物を回避するための一連の処理において、検出された障害物が動かないことが前提となっている。しかしながら、現実には、人や動物、同じ圃場で走行する作業車両などが障害物として検出された場合、検出後に障害物が動くことが想定されるため、障害物との接触をより確実に回避し、より安全な自動走行を実現する上で、改善の余地が存在するものであった。
【0007】
そこで、本発明は、このような問題を解消し、動く障害物に対して、自動走行時の安全性をより向上できる自動走行システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するため、第1の発明は、
圃場内の作業車両を自動走行させる自動走行システムであって、
前記作業車両は、障害物を検出する障害物検出センサと、前記障害物検出センサによって検出された障害物の位置及び形状を示す三次元撮像情報を取得可能な光学式撮像装置とを備え、
前記三次元撮像画像情報から検出された障害物の分類を行う障害物分類処理部を備え、
障害物分類処理部は、前記検出された障害物を、移動しない障害物と、移動する障害物とに分類し、
前記障害物分類処理部による障害物の分類結果に応じて、自動走行時における障害物の回避ルートを変更可能に構成されたことを特徴とする自動走行システムを提供する。
【0009】
上記第1の発明によれば、障害物分類処理部による障害物の分類結果に応じて、自動走行時における障害物の回避ルートを変更可能に構成されたことで、動く障害物に対して、自動走行時の安全性をより向上できる。
【0010】
第2の発明は、上記第1の発明の構成に加え、
前記回避ルートを決定する回避ルート決定部と、
障害物の回避範囲を設定可能な回避範囲設定部とを備え、
前記回避ルート決定部は、前記回避範囲設定部によって設定された回避範囲に基づき回避ルートを決定するように構成され、
前記回避範囲は、前記作業車両の機体の中心基準位置に対して、前方回避距離、後方回避距離、左方回避距離、右方回避距離をそれぞれ設定することにより画定される矩形の領域となっていることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
11日前
井関農機株式会社
収穫機
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
苗移植機
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
洗米炊飯装置
4日前
井関農機株式会社
ロボット作業車両
13日前
井関農機株式会社
ロボット作業車両
1か月前
井関農機株式会社
ハイブリッドエンジン装置
1か月前
井関農機株式会社
SCRシステムおよび尿素水タンク
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
1か月前
個人
除草具
8日前
個人
殺虫スプレー
19日前
個人
ベアスタンガン
8日前
井関農機株式会社
収穫機
11日前
井関農機株式会社
収穫機
11日前
個人
ペット用玩具
5日前
井関農機株式会社
作業車両
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ