TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011612
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023113825
出願日
2023-07-11
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01B
33/16 20060101AFI20250117BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 耕耘の仕上がり状況を、圃場の目視によらず確認可能であり、耕耘が不十分となっている場合に、迅速に気づくことできる作業車両を提供する。
【解決手段】
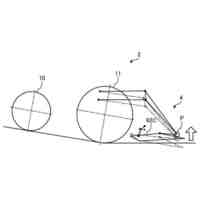
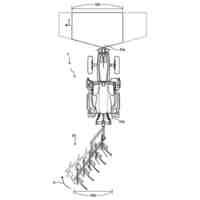
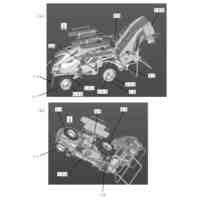
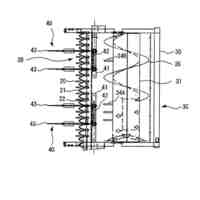
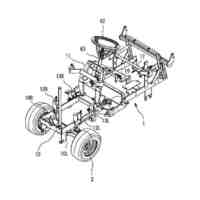
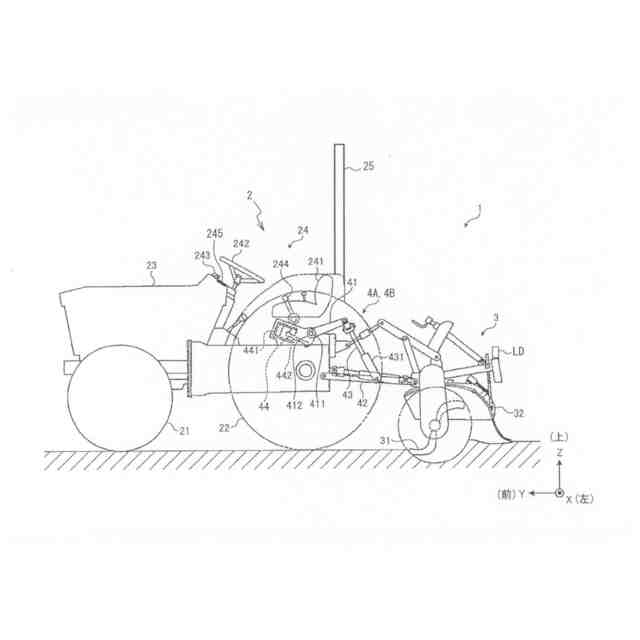
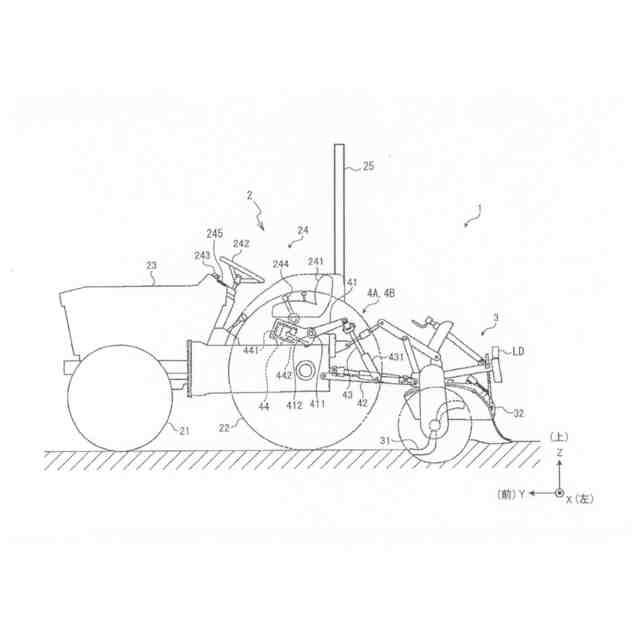
圃場を耕耘する作業機3を備えた作業車両1であって、
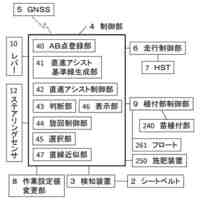
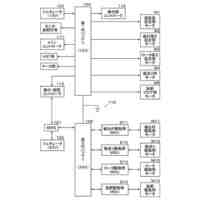
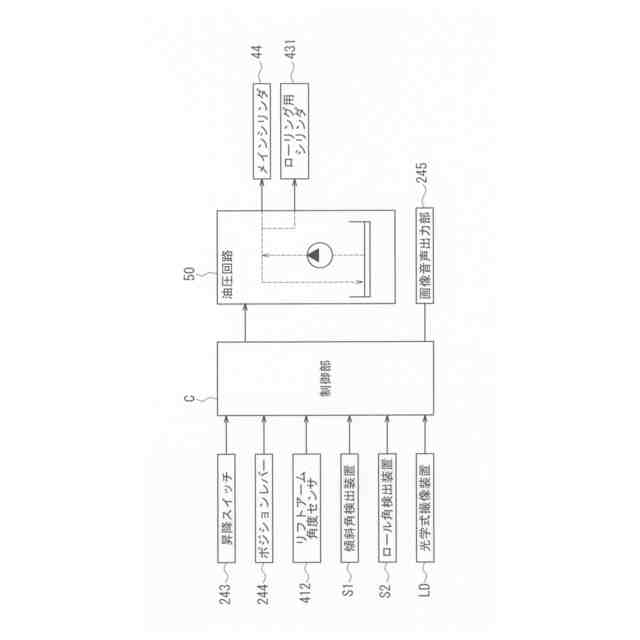
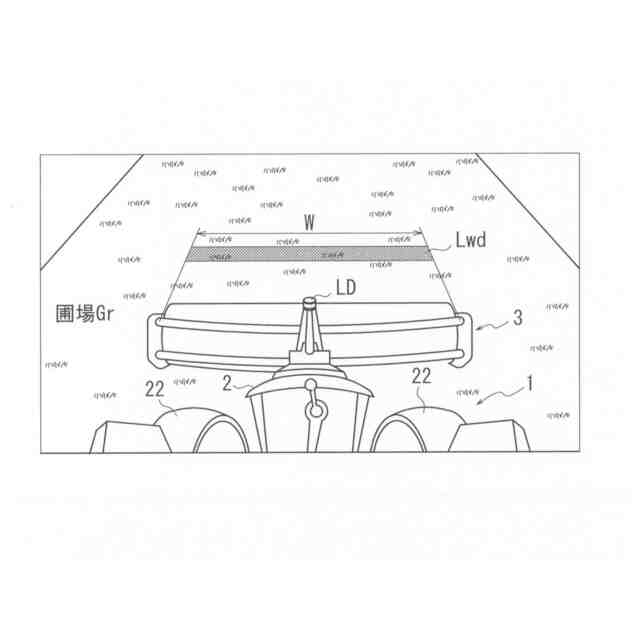
圃場を撮像する光学式撮像装置LDと、前記光学式撮像装置LDから圃場の形状を示す三次元撮像情報を取得する制御部Cとを備え、
前記光学式撮像装置LDは、耕耘後の圃場を直線状に走査して撮像するよう構成され、
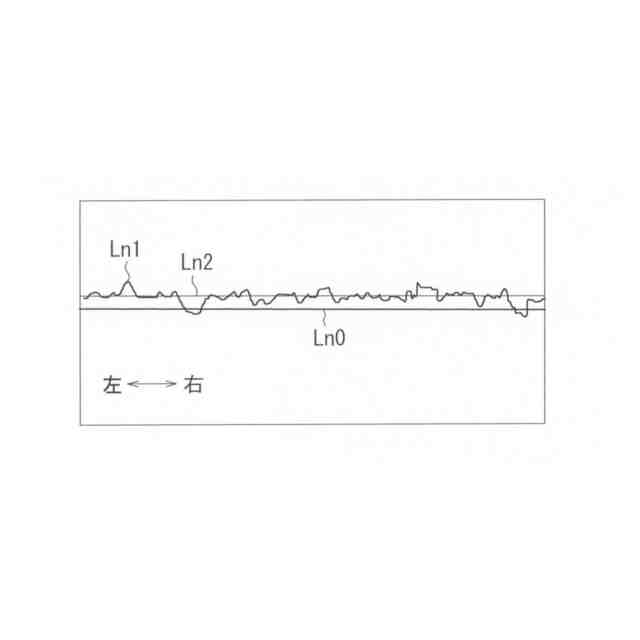
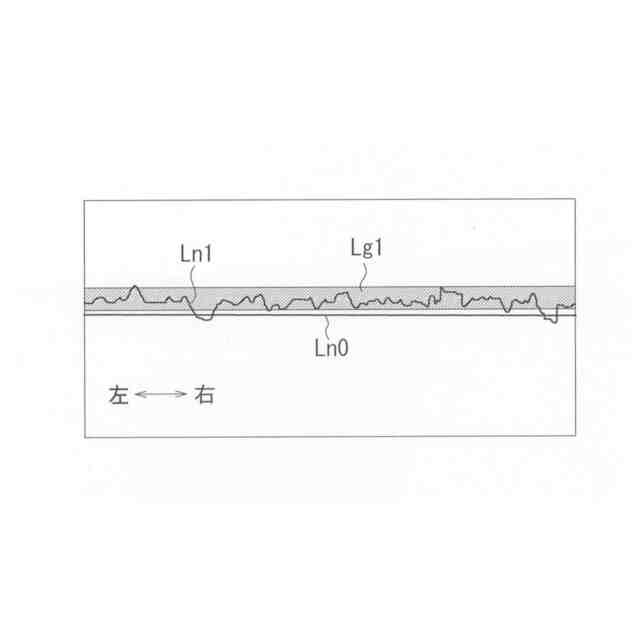
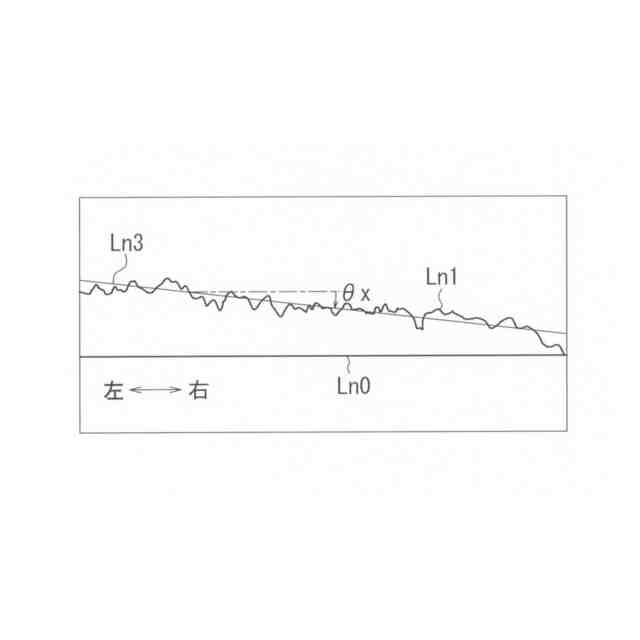
前記制御部Cは、取得した前記三次元撮像情報から、圃場上面の高低を示す線分である圃場高低線Ln1を算出し、算出した圃場高低線の上下の幅が、所定範囲内に納まっているか評価し、評価結果を出力部245から出力させるよう構成されたことを特徴とする作業車両1の提供によって、上記課題が解決される。
【選択図】 図1
特許請求の範囲
【請求項1】
圃場を耕耘する作業機を備えた作業車両であって、
圃場を撮像する光学式撮像装置と、前記光学式撮像装置から圃場の形状を示す三次元撮像情報を取得する制御部とを備え、
前記光学式撮像装置は、耕耘後の圃場を直線状に走査して撮像するよう構成され、
前記制御部は、取得した前記三次元撮像情報から、圃場上面の高低を示す線分である圃場高低線を算出し、算出した圃場高低線の上下の幅が、所定範囲内に納まっているか評価し、評価結果を出力部から出力させるよう構成されたことを特徴とする作業車両。
続きを表示(約 470 文字)
【請求項2】
前記作業車両は、前記作業機を回動するローリング機構を備え、前記制御部により前記ローリング機構を制御することで、前記作業機のローリング制御が可能に構成されており、
前記制御部は、算出された前記圃場高低線を直線で近似することで、耕耘後の圃場上面の傾斜を示す耕耘面傾斜線を算出し、算出された耕耘面傾斜線と、圃場の水平方向を示す線分とのなす角である耕耘面傾斜角を算出し、
前記ローリング制御において、算出された前記耕耘面傾斜角を打ち消す回動方向及び角度となるように前記作業機の姿勢を補正するよう構成されたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、算出された前記圃場高低線から、前記圃場高低線の高さ平均を示す水平線である高低平均水平線を算出し、算出された前記高低平均水平線によって示される高さと、予め設定された目標高さとの差が所定の限界値を超える場合、作業者に車速を減速するよう促す指示情報を、出力部から出力するよう構成されたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場において耕耘を行う作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、作業機として、圃場を耕耘する耕耘機を備えた作業車両が知られている(例えば、特許文献1参照)。この従来の作業車両は、作業者が乗車して圃場を走行しつつ、走行車体の後部に配された作業機によって圃場を耕耘するよう構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-48296号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の作業車両は、耕耘の仕上がり状況を、作業者が圃場を目視することによって確認しなければならず、不便であった。加えて、作業車両の乗車時に、作業者は前を向いており、作業機は、作業車両の後方を耕耘しながら走行するため、耕耘が不十分となっている場合にも気づきにくく、耕耘不足の発見が遅れることにより、作業効率の著しい低下を招くおそれがあった。
【0005】
本発明は、上記に鑑みてなされたものであって、作業者が、耕耘の仕上がり状況を、圃場の目視によらず確認可能であり、耕耘が不十分となっている場合に、迅速に気づくことでき、これにより作業効率を向上できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、第1の発明は、
圃場を耕耘する作業機を備えた作業車両であって、
圃場を撮像する光学式撮像装置と、前記光学式撮像装置から圃場の形状を示す三次元撮像情報を取得する制御部とを備え、
前記光学式撮像装置は、耕耘後の圃場を直線状に走査して撮像するよう構成され、
前記制御部は、取得した前記三次元撮像情報から、圃場上面の高低を示す線分である圃場高低線を算出し、算出した圃場高低線の上下の幅が、所定範囲内に納まっているか評価し、評価結果を出力部から出力させるよう構成されたことを特徴とする作業車両を提供する。
【0007】
上記第1の発明によれば、作業者は、耕耘後の圃場について、仕上がり状況を目視によらず出力部の出力によって確認可能となり、さらに、耕耘が不十分となっている場合に、迅速に気づくことできるため、耕耘の精度を向上できるとともに、作業者の利便性が向上させ、作業効率を向上できる。
【0008】
第2の発明は、上記第1の発明の構成に加え、前記作業車両は、前記作業機を回動するローリング機構を備え、前記制御部により前記ローリング機構を制御することで、前記作業機のローリング制御が可能に構成されており、
前記制御部は、算出された前記圃場高低線を直線で近似することで、耕耘後の圃場上面の傾斜を示す耕耘面傾斜線を算出し、算出された耕耘面傾斜線と、圃場の水平方向を示す線分とのなす角である耕耘面傾斜角を算出し、
前記ローリング制御において、算出された前記耕耘面傾斜角を打ち消す回動方向及び角度となるように前記作業機の姿勢を補正するよう構成されたことを特徴とする。
【0009】
上記第2の発明によれば、上記第1の発明の効果に加え、実際の耕耘後の圃場上面の傾斜に基づき、作業機のローリング姿勢を補正(修正)することができるため、通常のローリング制御において、耕耘後の圃場面の仕上がりが傾斜するような場合でも水平とすることができる。その結果、耕耘後の仕上がりの圃場面を良好に水平とすることができ、耕耘作業の質を格段に向上することができる。
【0010】
第3の発明は、上記第1の発明の構成に加え、
前記制御装置は、算出された前記圃場高低線から、前記圃場高低線の高さ平均を示す水平線である高低平均水平線を算出し、算出された前記高低平均水平線によって示される高さと、予め設定された目標高さとの差が所定の限界値を超える場合、作業者に車速を減速するよう促す指示情報を、出力部から出力するよう構成されたことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
薬剤散布機
10日前
井関農機株式会社
収穫作業機
16日前
井関農機株式会社
収穫作業機
16日前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
農業支援システム
19日前
井関農機株式会社
汎用コンバインの脱穀装置
9日前
井関農機株式会社
汎用コンバインの脱穀装置
9日前
井関農機株式会社
汎用コンバインの脱穀装置
16日前
井関農機株式会社
田んぼアート作成システム
17日前
井関農機株式会社
作業車両の作業量調整システム
16日前
井関農機株式会社
移植機
9日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
2日前
個人
昆虫捕獲器
11日前
個人
トラップタワー
10日前
井関農機株式会社
作業車両
11日前
個人
ペット用デンタルおもちゃ
10日前
有限会社小林工業
エビ養殖設備
3日前
株式会社猫壱
首輪
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
9日前
平岡織染株式会社
防虫間仕切りシート
1日前
平岡織染株式会社
防虫間仕切りシート
9日前
東都興業株式会社
シート開閉装置
12日前
第一ビニール株式会社
栽培容器載置台
9日前
第一ビニール株式会社
植物の茎保持具
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ