TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060165
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170720
出願日
2023-09-29
発明の名称
作業車両の作業量調整システム
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01C
15/00 20060101AFI20250403BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】施肥作業機による施肥量の調整を安価に実行できる作業車両の作業量調整システムを提供すること。
【解決手段】実施形態の一態様に係る作業車両の作業量調整システムは、走行車体と、施肥作業機と、測位装置と、制御装置と、を備える。施肥作業機は、走行車体に連結されて、定常的に施肥作業を行う。測位装置は、走行車体の自己の位置を測定する。制御装置は、走行車体の車速を調整可能である。また、制御装置は、測位装置によって測定された走行車体の位置と、圃場の空撮画像を解析して作成される肥沃度マップと、に基づいて、圃場における施肥作業中の走行車体の車速を調整する。
【選択図】図6
特許請求の範囲
【請求項1】
走行車体と、
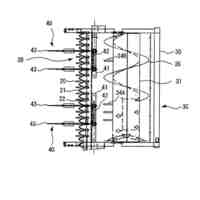
前記走行車体に連結されて、定常的に施肥作業を行う施肥作業機と、
前記走行車体の自己の位置を測定する測位装置と、
前記走行車体の車速を調整可能である制御装置と、を備え、
前記制御装置は、前記測位装置によって測定された前記走行車体の位置と、圃場の空撮画像を解析して作成される肥沃度マップと、に基づいて、前記圃場における施肥作業中の前記走行車体の車速を調整する作業車両の作業量調整システム。
続きを表示(約 650 文字)
【請求項2】
前記肥沃度マップは、前記施肥作業機の作業幅に基づいた大きさの区画に分割され、分割された前記区画ごとに前記走行車体の目標車速が設定される請求項1に記載の作業車両の作業量調整システム。
【請求項3】
前記走行車体は、原動機から駆動輪を駆動する走行伝達経路と、前記原動機から前記施肥作業機を駆動する作業伝達経路と、が分岐して並列され、
前記走行伝達経路は、無段変速装置を備え、
前記制御装置は、前記目標車速の変化に応じて前記無段変速装置によって前記走行車体の車速を調整する請求項2に記載の作業車両の作業量調整システム。
【請求項4】
前記走行車体は、操向輪を操舵するステアリングホイールを備え、
前記制御装置は、前記ステアリングホイールが自動操舵される自動操舵モードにおいて、前記目標車速が変化する区画の境目に到達する前に前記走行車体の増減速を開始する請求項3に記載の作業車両の作業量調整システム。
【請求項5】
前記制御装置は、前記ステアリングホイールが手動操舵される手動操舵モードにおいて、前記走行車体の現在地における目標車速に基づいて、前記走行車体の車速を調整する請求項4に記載の作業車両の作業量調整システム。
【請求項6】
前記制御装置は、前記走行車体の加減速時における加速度の絶対値の上限値を設定可能である請求項1~請求項5のいずれか一つに記載の作業車両の作業量調整システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両の作業量調整システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、測位センサと収量センサを備えるコンバインで収穫作業を行う際に、測位センサで得られたコンバインの測位情報と、収量センサで得られた収穫量の情報とを関係付けて収量マップを作成し、収量マップを参照して作成される肥料の散布計画に基づいて施肥作業機の施肥量を制御する作業機の散布支援システムが公知である(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-187377号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の従来技術により、圃場内の作物の生育ムラを抑制することで、作業負荷を均一化することができるとともに、管理の簡略化や作物の倒伏を防止して、後の作業を効率よく実行できる。しかしながら、従来技術は、施肥作業機の施肥量を調整するために、施肥量を可変とする機構が施肥作業機に必要となるうえ、収量マップに基づいて施肥作業機の制御装置との通信も必要となり、専用の高価な施肥作業機を必要とするシステムであった。
【0005】
本発明は、上記に鑑みてなされたものであって、施肥作業機による施肥量の調整を安価に実行できる作業車両の作業量調整システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
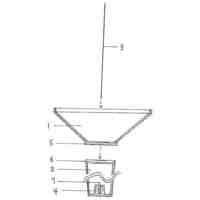
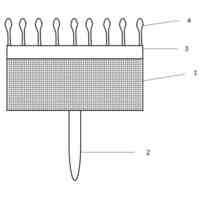
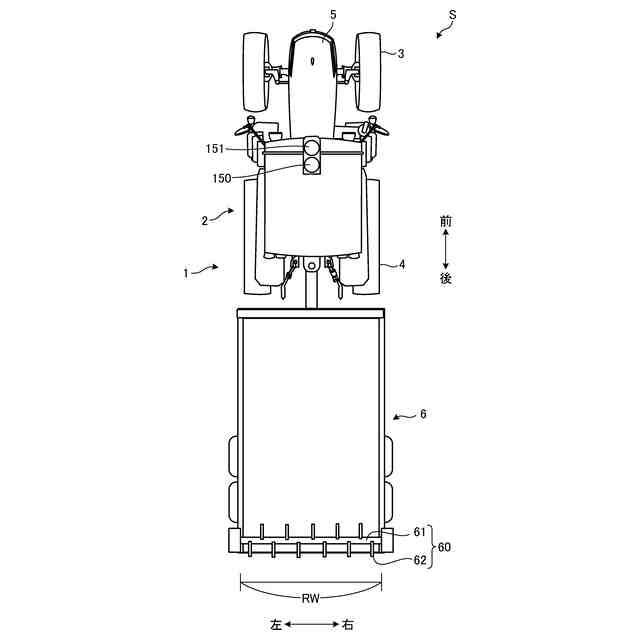
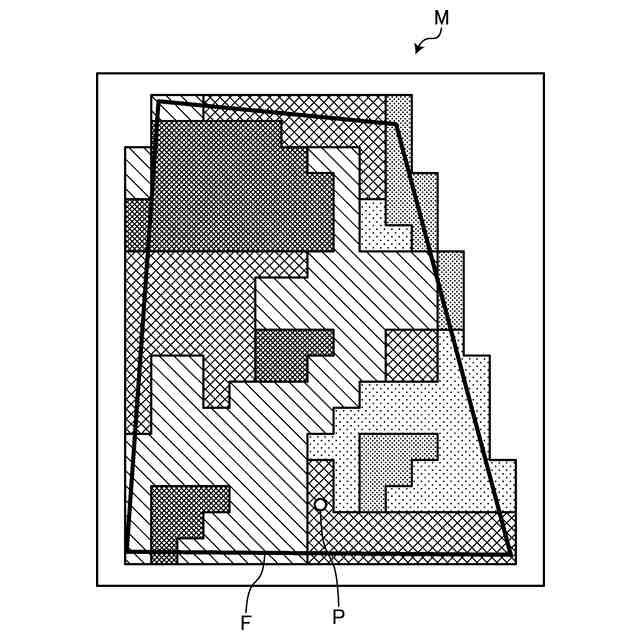
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両(1)の作業量調整システム(S)は、走行車体(2)と、走行車体(2)に連結されて、定常的に施肥作業を行う施肥作業機(6)と、走行車体(2)の自己の位置を測定する測位装置(150)と、走行車体(2)の車速を調整可能である制御装置(200)と、を備え、制御装置(200)は、測位装置(150)によって測定された走行車体(2)の位置と、圃場の空撮画像を解析して作成される肥沃度マップ(M)と、に基づいて、圃場における施肥作業中の走行車体(2)の車速を調整する。
【発明の効果】
【0007】
実施形態に係る作業車両の作業量調整システムによれば、施肥作業機による施肥量の調整を安価に実行できる。
【図面の簡単な説明】
【0008】
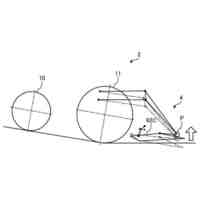
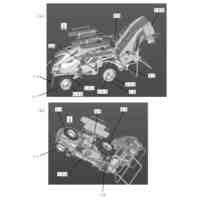
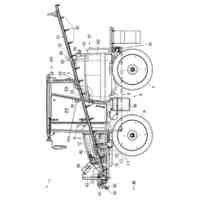
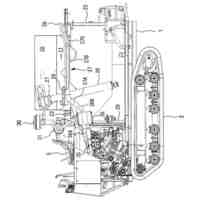
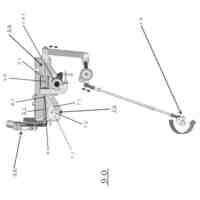
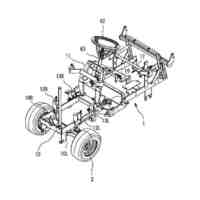
図1は、実施形態に係る作業車両の作業量調整システムの全体構成を示す概略左側面図である。
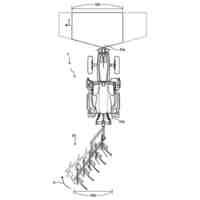
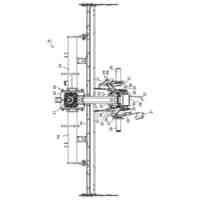
図2は、実施形態に係る作業車両の作業量調整システムの全体構成を示す概略平面図である。
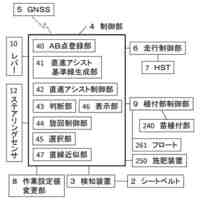
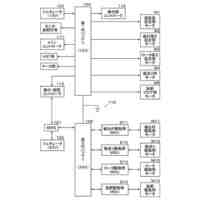
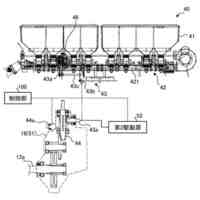
図3は、実施形態に係る作業車両の作業量調整システムの制御構成を示すブロック図である。
図4は、肥沃度マップを示す図である。
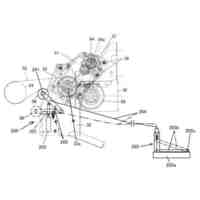
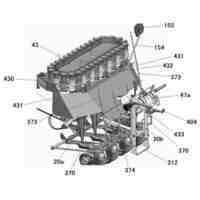
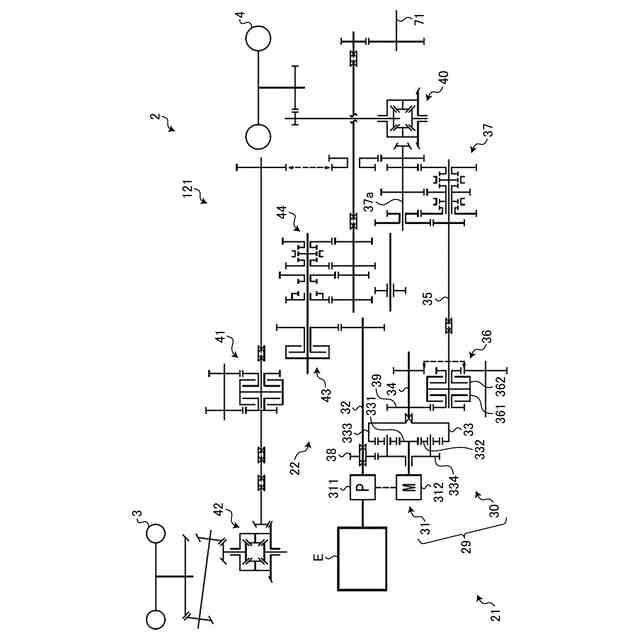
図5は、変速装置の構成を示す図である。
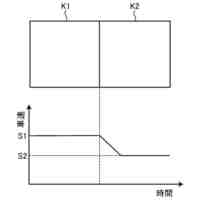
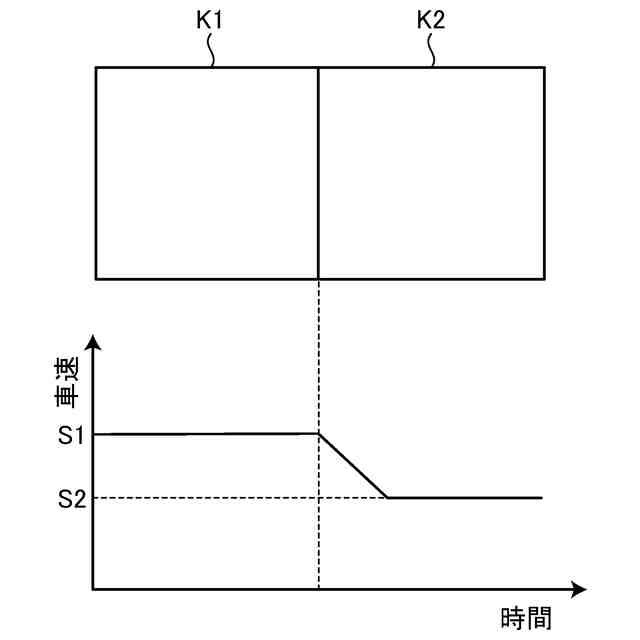
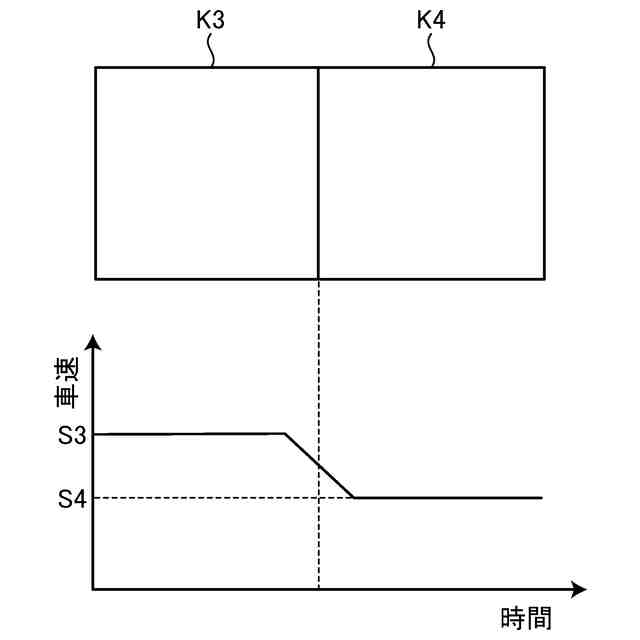
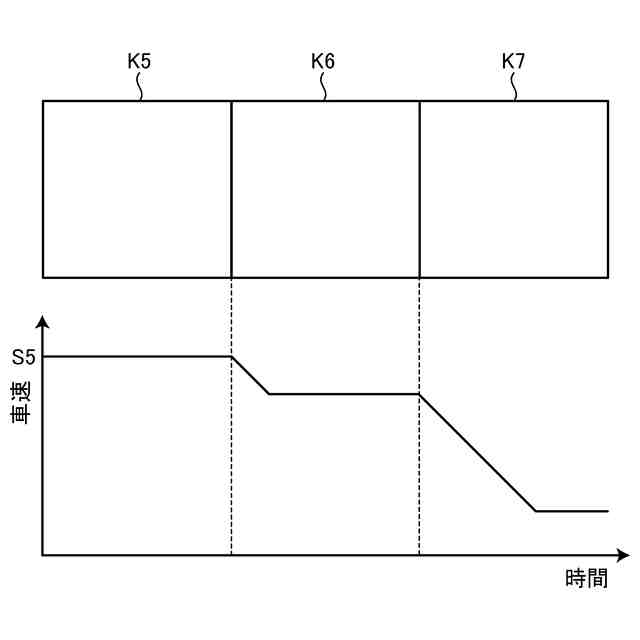
図6は、走行車体の車速の調整を説明する図である。
図7は、走行車体の車速の調整を説明する図である。
図8は、走行車体の車速の調整を説明する図である。
図9は、走行車体の車速の調整を説明する図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両(トラクタ)の作業量調整システムの概要>
まず、図1及び図2を参照して実施形態に係る作業車両の作業量調整システムSの概要について説明する。図1は、実施形態に係る作業車両の作業量調整システムSの全体構成を示す概略左側面図である。図2は、実施形態に係る作業車両の作業量調整システムSの全体構成を示す概略平面図である。なお、以下では、作業車両としてトラクタ1を例に説明する。また、作業車両であるトラクタ1は、自律走行しながら圃場で農作業を行うことが可能な農業用トラクタである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
収穫作業機
24日前
井関農機株式会社
収穫作業機
24日前
井関農機株式会社
薬剤散布機
18日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
耕耘作業機
3日前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
植物栽培設備
6日前
井関農機株式会社
施肥システム
3日前
井関農機株式会社
資材散布装置
3日前
井関農機株式会社
作業車の変速装置
6日前
井関農機株式会社
農業支援システム
27日前
井関農機株式会社
汎用コンバインの脱穀装置
17日前
井関農機株式会社
汎用コンバインの脱穀装置
17日前
井関農機株式会社
汎用コンバインの脱穀装置
24日前
井関農機株式会社
田んぼアート作成システム
25日前
井関農機株式会社
作業車両の作業量調整システム
24日前
井関農機株式会社
移植機
17日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業装置
2日前
個人
昆虫捕獲器
19日前
個人
トラップタワー
18日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
19日前
個人
プランターシーブ
26日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ