TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064484
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174299
出願日
2023-10-06
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01C
11/02 20060101AFI20250410BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。より具体的には、従来の野菜移植機のような作業車両については、自動的な苗植付け作業における欠株の発生が必ずしも十分に低減されていないことに本発明者は気付いた。
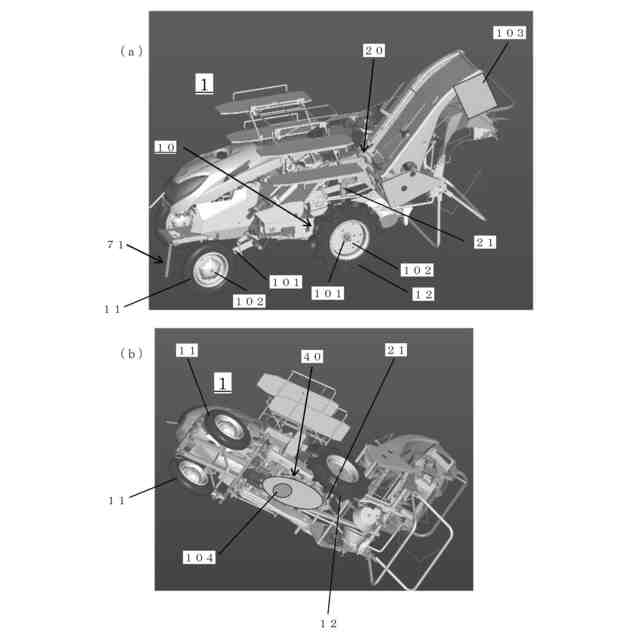
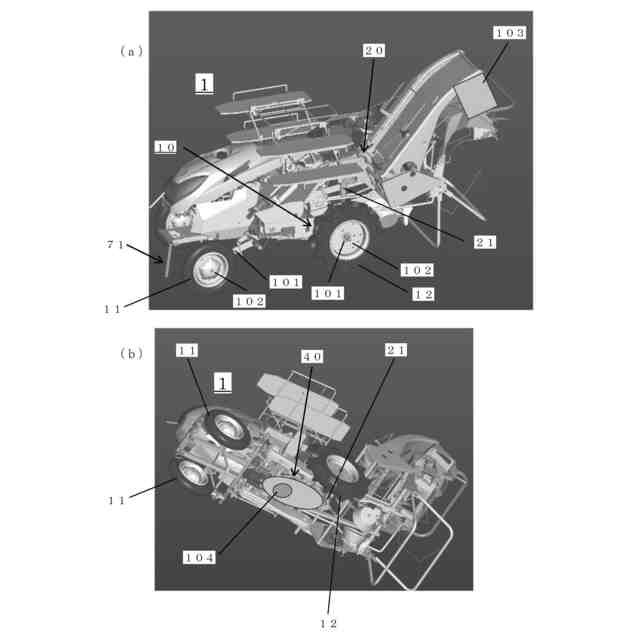
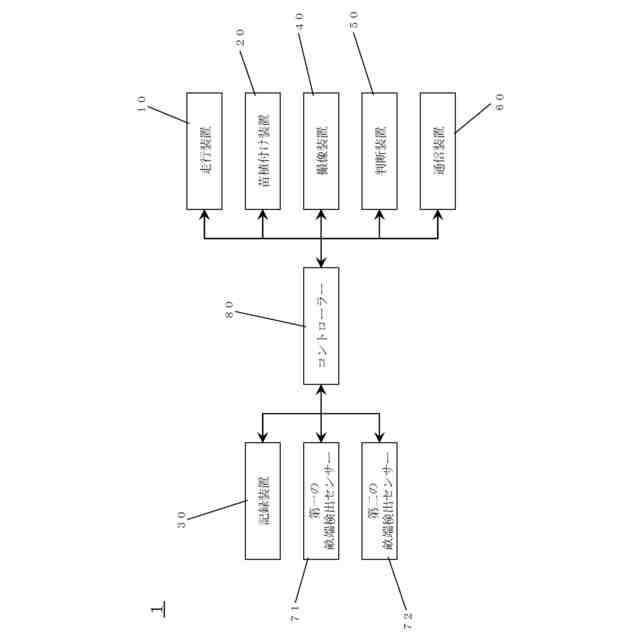
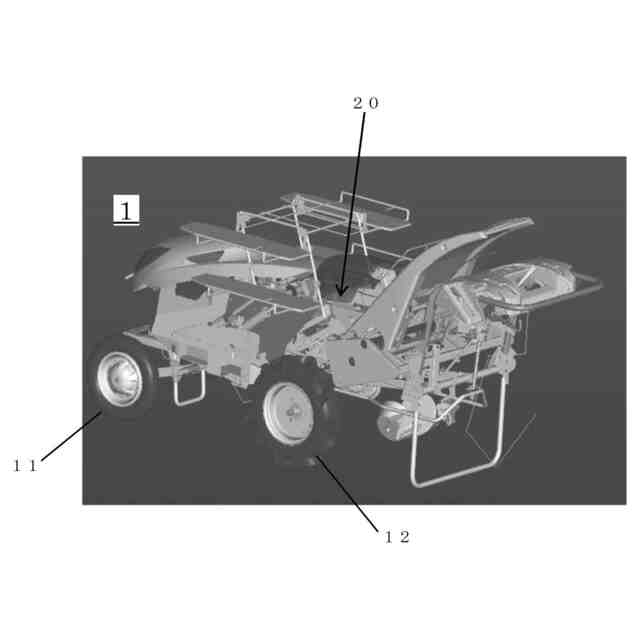
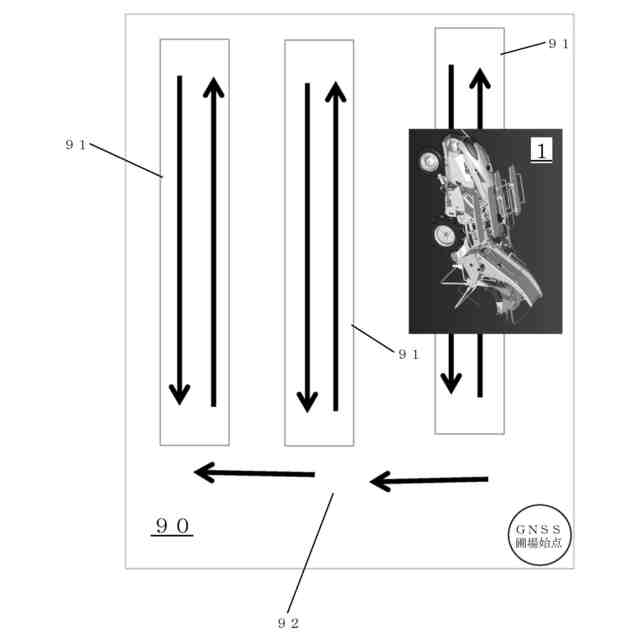
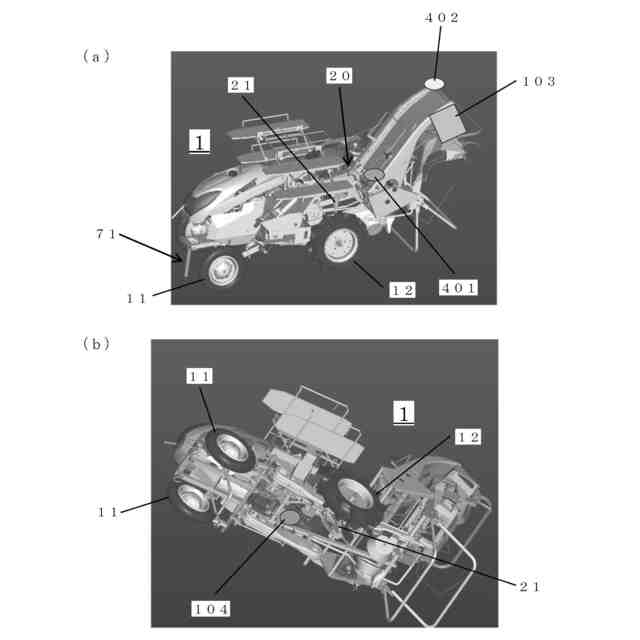
【解決手段】 苗植付け条において前進を行いながら苗を植付けた後、苗植付け条において後進を行う野菜移植機1であって、複数の苗植付けポイントの各々の位置に関する苗植付けポイント位置情報の記録を行う記録装置30と、少なくとも複数の苗植付けポイントにおける苗植付け状況の撮像を行う撮像装置40と、画像解析を利用することにより、苗植付け状況に関する苗植付け状況撮像データに基づき、欠株が発生したか否かを判断する判断装置50と、を備えている野菜移植機1である。
【選択図】 図1
特許請求の範囲
【請求項1】
苗植付け条において前進を行いながら苗を植付けた後、前記苗植付け条において後進を行う作業車両であって、
前記前進および前記後進を行う走行装置と、
前記苗植付け条における複数の苗植付けポイントの各々で苗植付けを行う苗植付け装置と、
前記複数の苗植付けポイントの各々の位置に関する苗植付けポイント位置情報の記録を行う記録装置と、
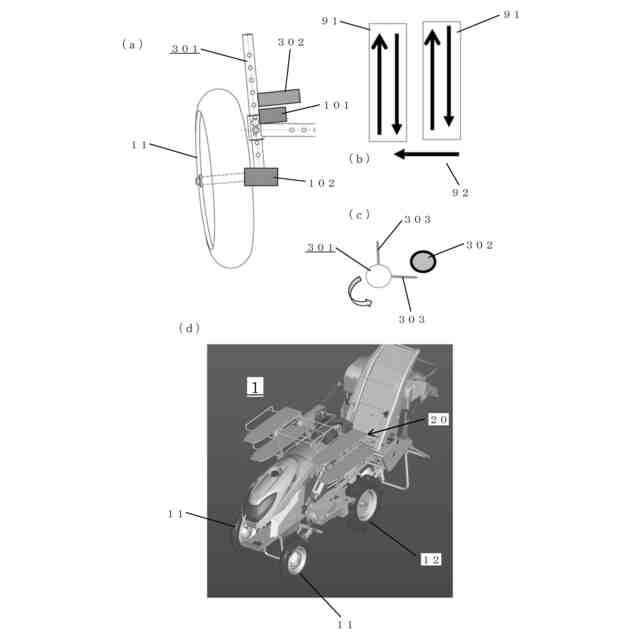
少なくとも前記複数の苗植付けポイントにおける苗植付け状況の撮像を行う撮像装置と、
画像解析を利用することにより、前記苗植付け状況に関する苗植付け状況撮像データに基づき、欠株が発生したか否かを判断する判断装置と、
前記走行装置、前記苗植付け装置、前記記録装置、前記撮像装置、および前記判断装置の制御を行うコントローラーと、
を備えていることを特徴とする作業車両。
続きを表示(約 1,700 文字)
【請求項2】
前記コントローラーは、前記走行装置に前記後進を行わせているとき、前記記録された苗植付けポイント位置情報に基づき、前記撮像装置に前記複数の苗植付けポイントにおける前記苗植付け状況の前記撮像を行わせることにより、前記判断装置に前記欠株が前記複数の苗植付けポイントの各々において発生したか否かを判断させるとともに、前記記録装置に前記発生した欠株の位置に関する欠株位置情報の記録を行わせることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記コントローラーは、前記走行装置に前記前進を行わせているとき、前記撮像装置に前記苗植付け状況の前記撮像を行わせることにより、前記判断装置に前記欠株が発生したか否かを判断させ、
前記欠株が発生しなかったと判断された場合においては、前記コントローラーは、前記走行装置に所定の後進スピードで前記後進を行わせ、
前記欠株が発生したと判断された場合においては、前記コントローラーは、前記走行装置に前記所定の後進スピードより小さい後進スピードで前記後進を行わせながら、前記記録された苗植付けポイント位置情報に基づき、前記撮像装置に前記複数の苗植付けポイントにおける前記苗植付け状況の前記撮像を行わせることにより、前記判断装置に前記欠株が前記複数の苗植付けポイントの各々において発生したか否かを判断させるとともに、前記苗植付け装置に前記発生した欠株の位置で補植を行わせることを特徴とする請求項1に記載の作業車両。
【請求項4】
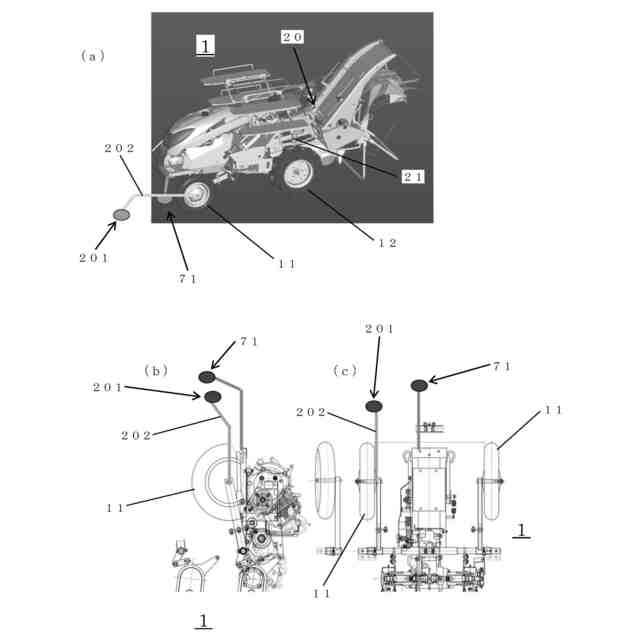
前記苗植付け条が形成されている畝の畝端を検出する、車体の前側へ設けられた第一の畝端検出センサーをさらに備えており、
前記第一の畝端検出センサーの位置は、車体前後方向を基準として前記走行装置の前輪の位置の前側であり、車体左右方向を基準として前記苗植付け装置の苗植付けホッパーの位置とズレており、
前記前進が行われているとき、前側畝端が前記第一の畝端検出センサーにより検出されると、あらかじめ定められた距離の前記前進が行われた後、前記車体は停止させられて前記後進が行われ、
前記後進が行われているとき、後側畝端が前記第一の畝端検出センサーにより検出されると、前記車体は停止させられ、つぎの畝への横移動のための横移動スペースにおける横移動が行われることを特徴とする請求項2に記載の作業車両。
【請求項5】
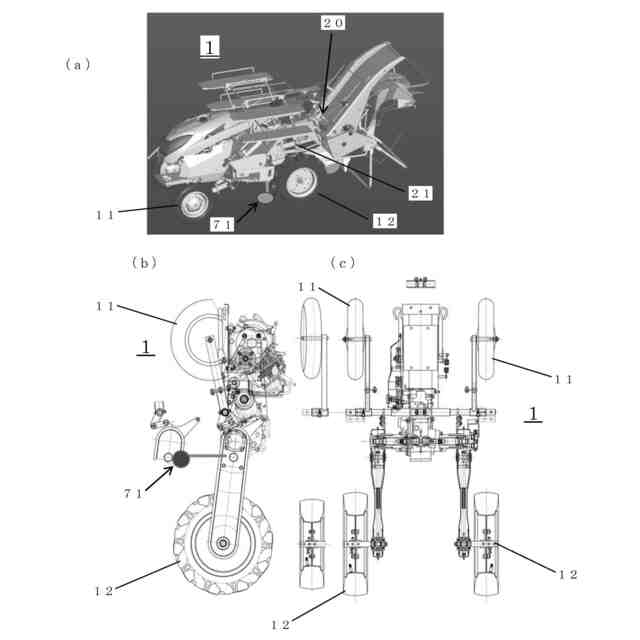
複数の作業車両が、複数の畝が並んで形成されている同じ圃場における協働作業を行っており、
前記複数の作業車両の各々は、前記畝の畝端を検出する、前記車体の後側へ設けられた第二の畝端検出センサーと、前記複数の作業車両の内の他の作業車両と通信を行う通信装置と、を備えており、
前記第二の畝端検出センサーの位置は、前記車体前後方向を基準として前記走行装置の後輪の位置の後側であり、前記車体左右方向を基準として前記苗植付けホッパーの位置とズレており、
前記複数の作業車両の内の一の作業車両の前記後進が行われているとき、前記後側畝端が前記一の作業車両の前記第二の畝端検出センサーにより検出されると、前記一の作業車両の前記通信装置は前記他の作業車両と通信を行って前記他の作業車両が前記横移動スペースへ進入することを阻止し、
前記後側畝端が前記他の作業車両の前記第二の畝端検出センサーにより検出されるまで、前記他の作業車両の前記後進が行われることを特徴とする請求項4に記載の作業車両。
【請求項6】
複数の前記他の作業車両が前記後側畝端近傍で待機している場合においては、前記後側畝端の検出がより遅い前記他の作業車両が、前記横移動スペースへ進入することをより優先的に許可されることを特徴とする請求項5に記載の作業車両。
【請求項7】
複数の前記他の作業車両が前記後側畝端近傍で待機している場合においては、前記つぎの畝がより奥である前記他の作業車両が、前記横移動スペースへ進入することをより優先的に許可されることを特徴とする請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、野菜移植機のような作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
複数の平行な直線経路に沿って走行する作業車両であって、直線経路から直線経路への移行のために車体を旋回させる旋回制御を行うコントローラーを備え、コントローラーは、隣接する直線経路へ旋回させられる車体の方向に基づく所定のタイミングで、隣接する直線経路への旋回が可能であるか不可能であるかを判断し、隣接する直線経路への旋回が不可能であると判断した場合には、後進を行った後に隣接する直線経路への旋回を行うまたは、隣接する直線経路をスキップして別の直線経路への旋回を行い、旋回が可能であるか不可能であるかを報知する報知装置を備えた作業車両が、知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-131460号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、作業車両ユーザーのさまざまなニーズを考慮し、便利な機能が野菜移植機のような作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
より具体的には、従来の野菜移植機のような作業車両については、自動的な苗植付け作業における欠株の発生が必ずしも十分に低減されていないことに本発明者は気付いた。
【0007】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、苗植付け条において前進を行いながら苗を植付けた後、前記苗植付け条において後進を行う作業車両であって、
前記前進および前記後進を行う走行装置と、
前記苗植付け条における複数の苗植付けポイントの各々で苗植付けを行う苗植付け装置と、
前記複数の苗植付けポイントの各々の位置に関する苗植付けポイント位置情報の記録を行う記録装置と、
少なくとも前記複数の苗植付けポイントにおける苗植付け状況の撮像を行う撮像装置と、
画像解析を利用することにより、前記苗植付け状況に関する苗植付け状況撮像データに基づき、欠株が発生したか否かを判断する判断装置と、
前記走行装置、前記苗植付け装置、前記記録装置、前記撮像装置、および前記判断装置の制御を行うコントローラーと、
を備えていることを特徴とする作業車両である。
【0009】
第2の本発明は、前記コントローラーは、前記走行装置に前記後進を行わせているとき、前記記録された苗植付けポイント位置情報に基づき、前記撮像装置に前記複数の苗植付けポイントにおける前記苗植付け状況の前記撮像を行わせることにより、前記判断装置に前記欠株が前記複数の苗植付けポイントの各々において発生したか否かを判断させるとともに、前記記録装置に前記発生した欠株の位置に関する欠株位置情報の記録を行わせることを特徴とする第1の本発明の作業車両である。
【0010】
第3の本発明は、前記コントローラーは、前記走行装置に前記前進を行わせているとき、前記撮像装置に前記苗植付け状況の前記撮像を行わせることにより、前記判断装置に前記欠株が発生したか否かを判断させ、
前記欠株が発生しなかったと判断された場合においては、前記コントローラーは、前記走行装置に所定の後進スピードで前記後進を行わせ、
前記欠株が発生したと判断された場合においては、前記コントローラーは、前記走行装置に前記所定の後進スピードより小さい後進スピードで前記後進を行わせながら、前記記録された苗植付けポイント位置情報に基づき、前記撮像装置に前記複数の苗植付けポイントにおける前記苗植付け状況の前記撮像を行わせることにより、前記判断装置に前記欠株が前記複数の苗植付けポイントの各々において発生したか否かを判断させるとともに、前記苗植付け装置に前記発生した欠株の位置で補植を行わせることを特徴とする第1の本発明の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ