TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025075908
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023187414
出願日
2023-11-01
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
F16H
61/431 20100101AFI20250508BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】ペダルの踏み込み量に応じてエンジン回転数と静油圧無段変速機のトラニオン軸角度を制御する作業車両がある。運転者はオートマチックトランスミッションの乗用車に乗っている感覚で作業車両を走行させることができるが、乗用車の運転と同様に減速時の足を放してペダルを解放する操作において、ペダルに応じた変速制御を行うと静油圧無段変速装置の減速効果により急減速が発生するなど乗り心地に違和感を生じさせることがあった。そこで、違和感なく走行できる作業車両を提供する。
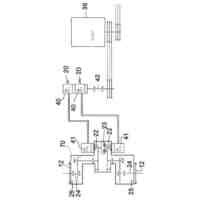
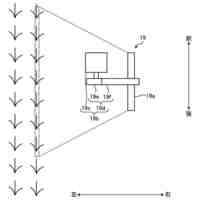
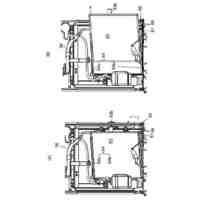
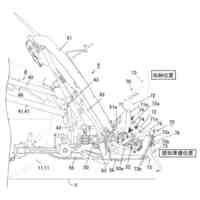
【解決手段】原動機Eの回転数を操作するアクセルペダル10の操作位置に応じて静油圧無段変速装置のトラニオン軸を操作する変速アクチュエータを制御する制御部100を設けた作業車両において、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設ける。
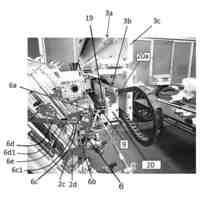
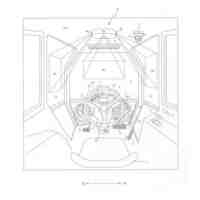
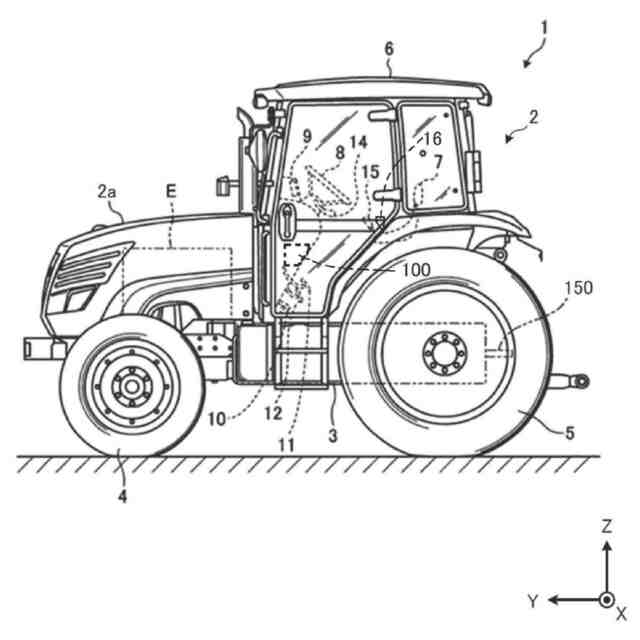
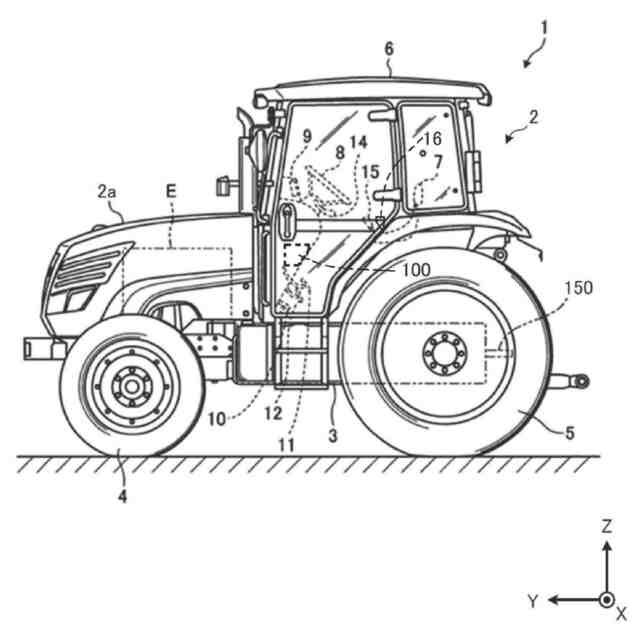
【選択図】図1
特許請求の範囲
【請求項1】
機体に搭載した原動機(E)の回転動力を静油圧無段変速装置(31)で変速して走行車輪(4,5)を駆動し、原動機(E)の回転数を操作するアクセルペダル(10)の操作位置を検出するアクセルペダルセンサ(125)を設けて、アクセルペダル(10)の操作位置に応じて静油圧無段変速装置(31)のトラニオン軸を操作する変速アクチュエータを制御する制御部(100)を設けた作業車両において、アクセルペダル(10)による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けたことを特徴とする作業車両。
続きを表示(約 550 文字)
【請求項2】
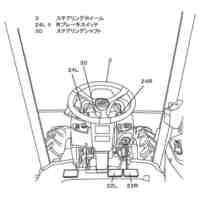
副変速機構(37)を操作する副変速レバー(16)の操作位置を検出する副変速レバーセンサを設け、副変速レバー(16)が所定の変速段以上の高速操作位置である時には、アクセルペダル(10)による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けたことを特徴とする請求項1記載の作業車両。
【請求項3】
原動機(E)の回転数が所定の回転数以上であることを原動機回転数センサが検出している時には、アクセルペダル(10)による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けたことを特徴とする請求項1記載の作業車両。
【請求項4】
ブレーキペダル(12)を踏み込み操作したことを検出するブレーキペダルセンサがブレーキペダル(12)の踏み込み操作を検出している時には、アクセルペダル(10)による減速時に目標値に対する変速アクチュエータの応答速度を制限しないことを特徴とする請求項1~請求項3の何れか1項に記載の作業車両。
【請求項5】
機体に設けた車速センサにより車速が0であることを検出した時には、トラニオン軸を操作する変速アクチュエータを即座に予め設定された低速位置に制御することを特徴とする請求項4記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
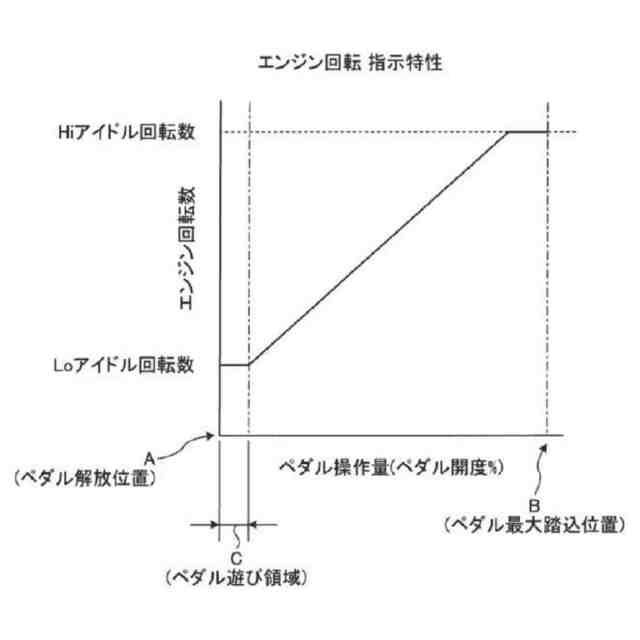
ペダルの踏み込み量を検知し、踏み込み量に応じてエンジン回転数と静油圧無段変速機のトラニオン軸角度を制御する作業車両が公知である(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6511902号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
運転者はオートマチックトランスミッションの乗用車に乗っている感覚で作業車両を走行させることができるが、乗用車の運転と同様に減速時の足を放してペダルを解放する操作において、ペダルに応じた変速制御を行うと静油圧無段変速装置の減速効果により急減速が発生するなど乗り心地に違和感を生じさせることがあった。
【0005】
本発明では、違和感なく走行できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
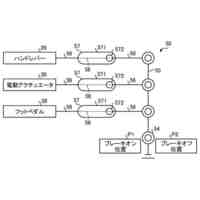
請求項1記載の発明は、機体に搭載した原動機Eの回転動力を静油圧無段変速装置31で変速して走行車輪4,5を駆動し、原動機Eの回転数を操作するアクセルペダル10の操作位置を検出するアクセルペダルセンサ125を設けて、アクセルペダル10の操作位置に応じて静油圧無段変速装置31のトラニオン軸を操作する変速アクチュエータを制御する制御部100を設けた作業車両において、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けた作業車両である。
【0007】
請求項1記載の発明によれば、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けたので、減速時に踏み込んでいたアクセルペダル10から足を放すなどの操作をした場合でも急減速を抑制することで違和感なく走行できる。
【0008】
請求項2記載の発明は、副変速機構37を操作する副変速レバー16の操作位置を検出する副変速レバーセンサを設け、副変速レバー16が所定の変速段以上の高速操作位置である時には、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けた請求項1記載の作業車両である。
【0009】
請求項2記載の発明によれば、副変速機構37を操作する副変速レバー16の操作位置を検出する副変速レバーセンサを設け、副変速レバー16が所定の変速段以上の高速操作位置である時には、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けたので、走行車速が高速での減速時に踏み込んでいたアクセルペダル10から足を放すなどの操作をした場合でも急減速を抑制することで違和感なく走行でき、副変速レバー16が低速操作位置に操作されて走行車速が低速である時には、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けず、アクセルペダル10のペダル操作に応答性良く減速して違和感のない制御にできる。
【0010】
請求項3記載の発明は、原動機Eの回転数が所定の回転数以上であることを原動機回転数センサが検出している時には、アクセルペダル10による減速時に目標値に対する変速アクチュエータの応答速度に制限を設けた請求項1記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
移植機
2か月前
井関農機株式会社
田植機
27日前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
調製設備
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
苗移植機
2か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
苗移植機
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ