TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025053978
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023163126
出願日
2023-09-26
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250331BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 従来の田植え機などのような作業車両については、車体の自動走行が必ずしも容易ではない。
【解決手段】手動操作によって圃場の最外周領域において行われる作業走行である最外周走行を行った際の走行車体の軌跡を取得する軌跡取得部と、前記軌跡に基づいて、前記最外周走行の完了時点での前記圃場における未作業領域を算出する未作業領域算出部と、 前記走行車体が旋回しながら前記未作業領域の角部を作業走行するための目標旋回経路を、前記未作業領域に基づいて生成する旋回経路生成部と、を備え、走行車体の少なくとも位置及び方位いずれかを測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、を備え、 前記方向制御部は、前記走行車体を目標直進経路から次の目標直進経路に向けて方向転換させる自動方向転換制御を実行可能である。
【選択図】 図10
特許請求の範囲
【請求項1】
手動操作によって圃場の最外周領域において行われる作業走行である最外周走行を行った際の走行車体の軌跡を取得する軌跡取得部と、
前記軌跡に基づいて、前記最外周走行の完了時点での前記圃場における未作業領域を算出する未作業領域算出部と、
前記走行車体が旋回しながら前記未作業領域の角部を作業走行するための目標旋回経路を、前記未作業領域に基づいて生成する旋回経路生成部と、を備え、
走行車体の少なくとも位置及び方位いずれかを測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、を備え、前記方向制御部は、前記走行車体を目標直進経路から次の目標直進経路に向けて方向転換させる自動方向転換制御を実行可能である作業車両。
続きを表示(約 440 文字)
【請求項2】
目標経路を記憶する記憶装置と、測位装置によって特定された前記走行車体の位置、および前記記憶装置に記憶された前記目標経路に基づいて、前記走行車体が前記目標経路に沿って走行するように前記走行車体の操舵を制御する制御装置と、を備え、前記目標経路は、並列する複数の主経路と、前記複数の主経路を接続する1つ以上の旋回経路とを含み、前記制御装置は、前記走行車体が自動操舵によって前記旋回経路の1つに沿って旋回しているとき、前記走行車体の位置が前記旋回経路から基準距離以上離れた場合、警告装置に警告を出力させ、
走行装置を有する走行車体と、前記走行装置を操向可能な操向ユニットと、衛星測位システムにより位置情報を取得する受信装置と、慣性計測装置と、前記受信装置からの情報及び前記慣性計測装置からの情報に基づいて前記前記操向ユニットを制御する制御部と、が備えられ、前記受信装置と前記慣性計測装置と、が前記走行車体における同じ箇所に配置されている請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植え機などのような作業車両に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
車体へ昇降可能に取付けられた植付け装置と、ステアリングハンドルを駆動するステアリングモーターと、ステアリングモーターにステアリングハンドルを駆動させることにより、車体の直進制御を行う制御装置と、を有する田植え機などのような作業車両が、知られている(たとえば、特許文献1および2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
特開2002-335720号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述された従来の田植え機などのような作業車両については、車体の自動走行が必ずしも容易ではない。
【0005】
本発明は、上述された従来の課題を考慮し、車体の自動走行制御を行うことができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、手動操作によって圃場の最外周領域において行われる作業走行である最外周走行を行った際の走行車体の軌跡を取得する軌跡取得部と、前記軌跡に基づいて、前記最外周走行の完了時点での前記圃場における未作業領域を算出する未作業領域算出部と、
前記走行車体が旋回しながら前記未作業領域の角部を作業走行するための目標旋回経路を、前記未作業領域に基づいて生成する旋回経路生成部と、を備え、走行車体の少なくとも位置及び方位いずれかを測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、を備え、前記方向制御部は、前記走行車体を目標直進経路から次の目標直進経路に向けて方向転換させる自動方向転換制御を実行可能である作業車両である。
【0007】
第2の本発明は、目標経路を記憶する記憶装置と、測位装置によって特定された前記走行車体の位置、および前記記憶装置に記憶された前記目標経路に基づいて、前記走行車体が前記目標経路に沿って走行するように前記走行車体の操舵を制御する制御装置と、を備え、前記目標経路は、並列する複数の主経路と、前記複数の主経路を接続する1つ以上の旋回経路とを含み、前記制御装置は、前記走行車体が自動操舵によって前記旋回経路の1つに沿って旋回しているとき、前記走行車体の位置が前記旋回経路から基準距離以上離れた場合、警告装置に警告を出力させ、走行装置を有する走行車体と、前記走行装置を操向可能な操向ユニットと、衛星測位システムにより位置情報を取得する受信装置と、慣性計測装置と、前記受信装置からの情報及び前記慣性計測装置からの情報に基づいて前記前記操向ユニットを制御する制御部と、が備えられ、前記受信装置と前記慣性計測装置と、が前記走行車体における同じ箇所に配置されている請求項1に記載の作業車両である。
【発明の効果】
【0008】
第1の本発明により、車体の自動走行を行うことが可能である。
【0009】
第2の本発明により、第1の本発明の効果に加えて、車体の旋回制御を行うことが可能である。
【図面の簡単な説明】
【0010】
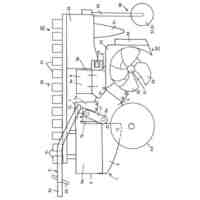
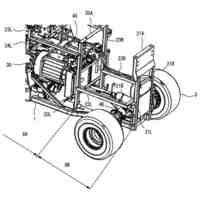
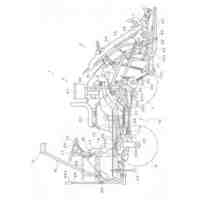
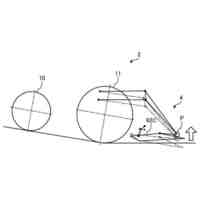
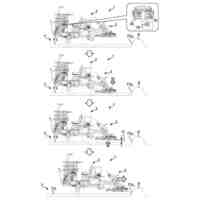
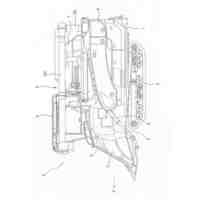
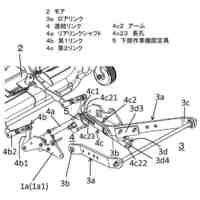
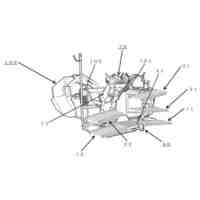
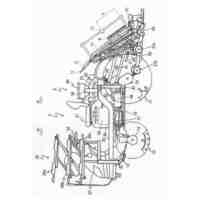
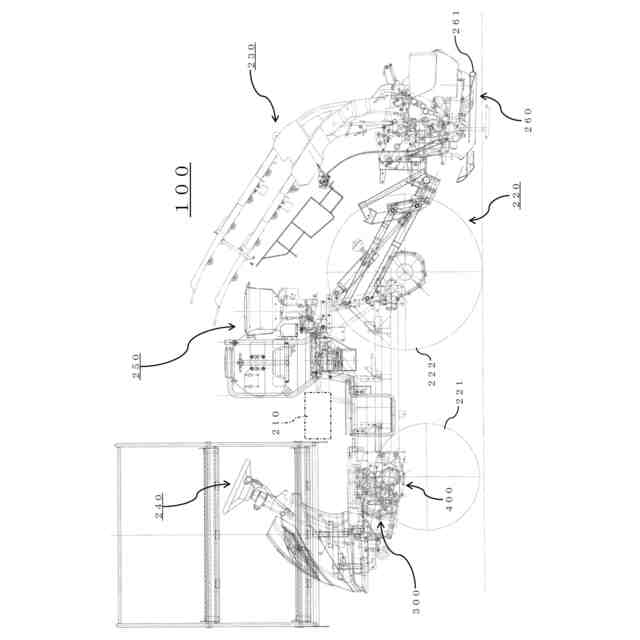
本発明における実施の形態の田植え機の左側面図
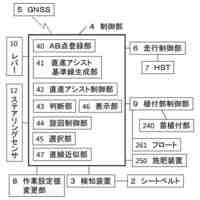
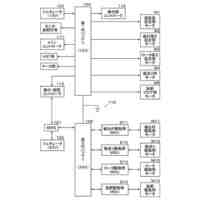
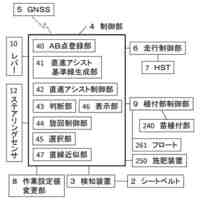
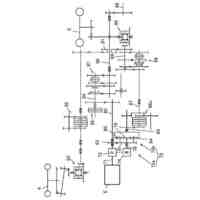
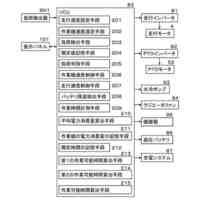
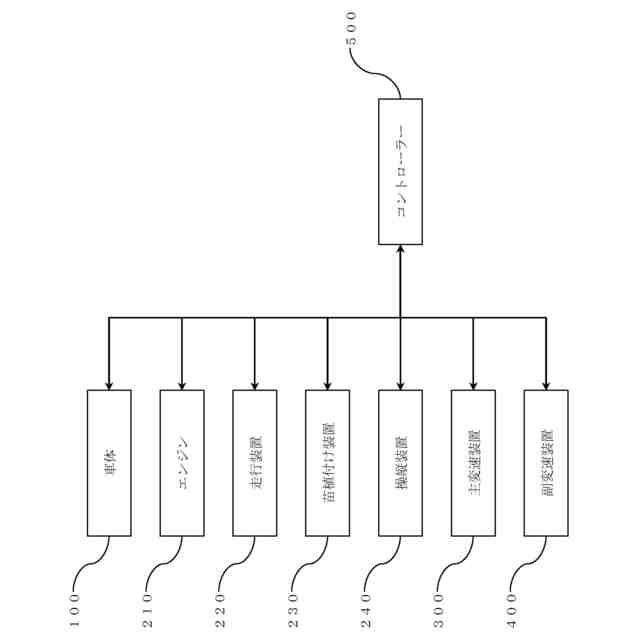
本発明における実施の形態の田植え機のブロック図
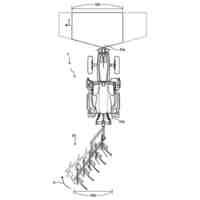
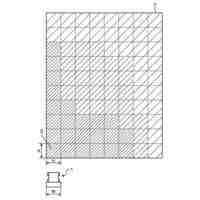
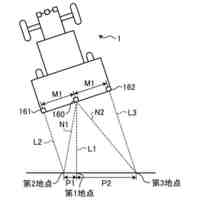
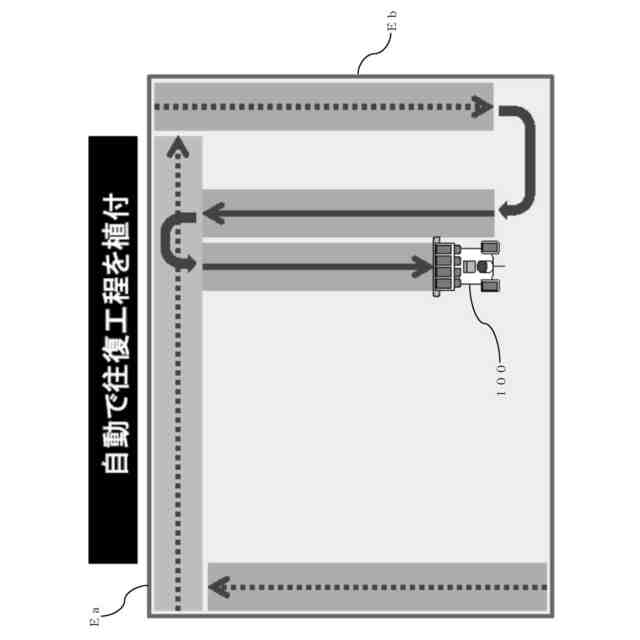
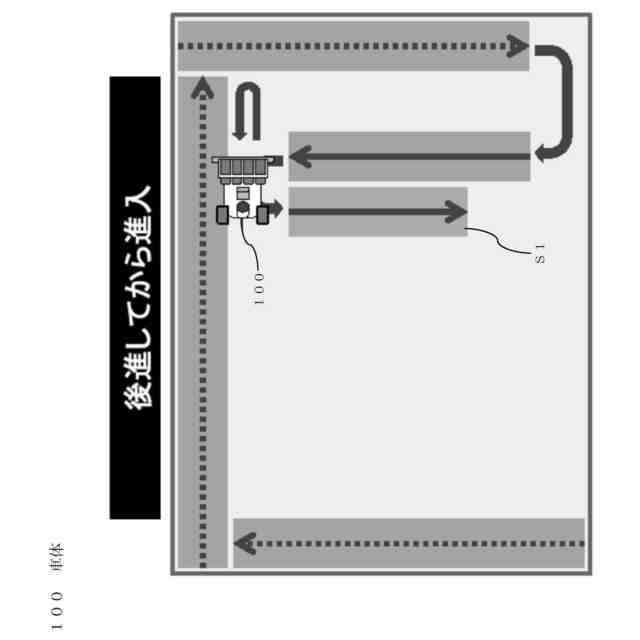
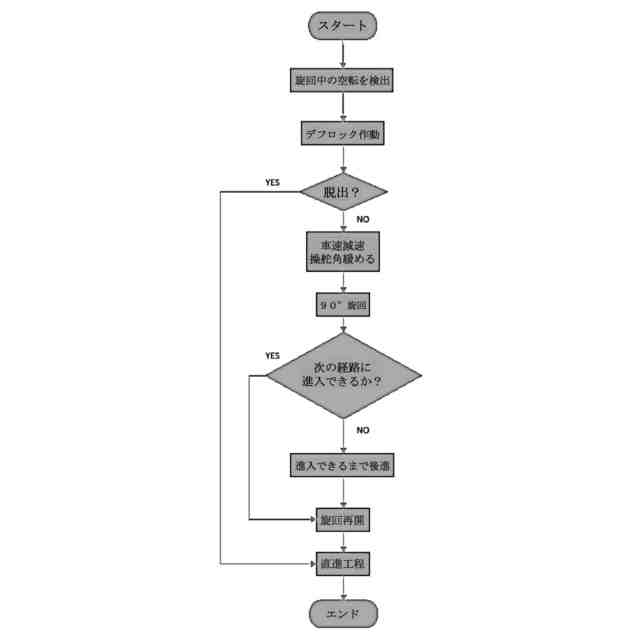
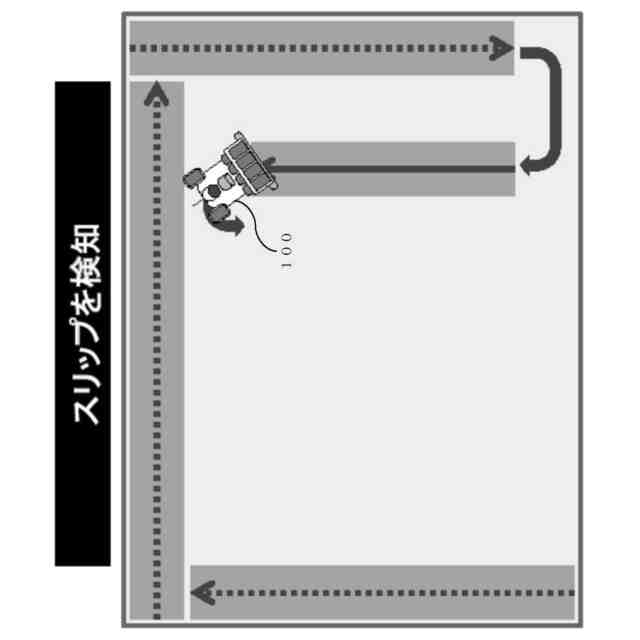
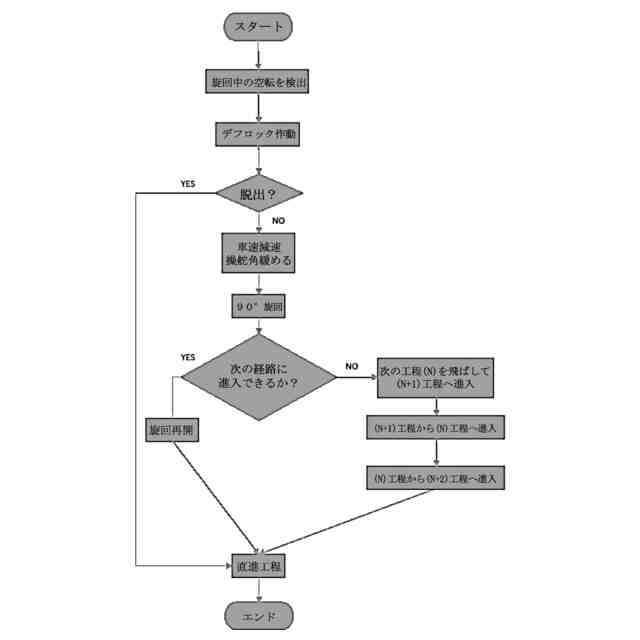
本発明における実施の形態の田植え機の旋回制御の説明図(その一)
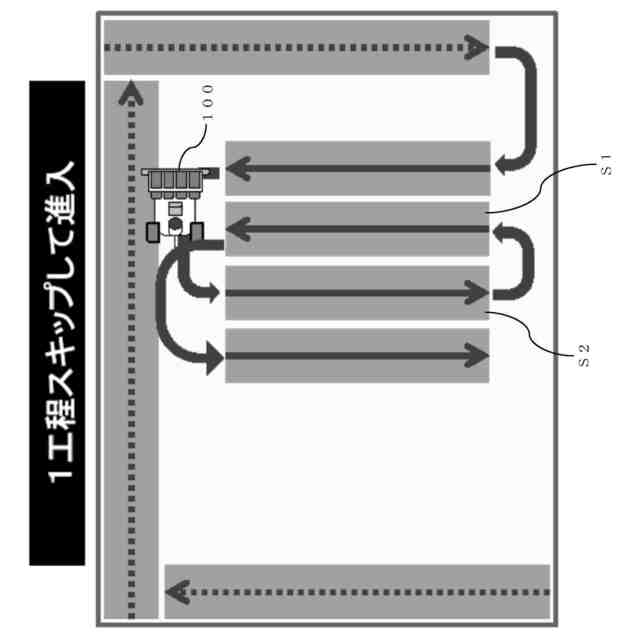
本発明における実施の形態の田植え機の旋回制御の説明図(その二)
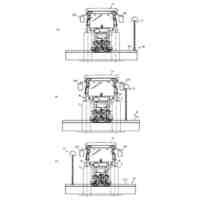
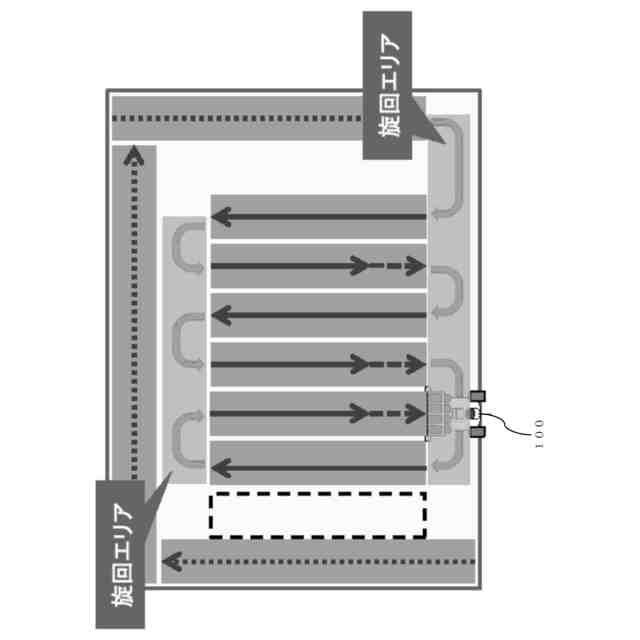
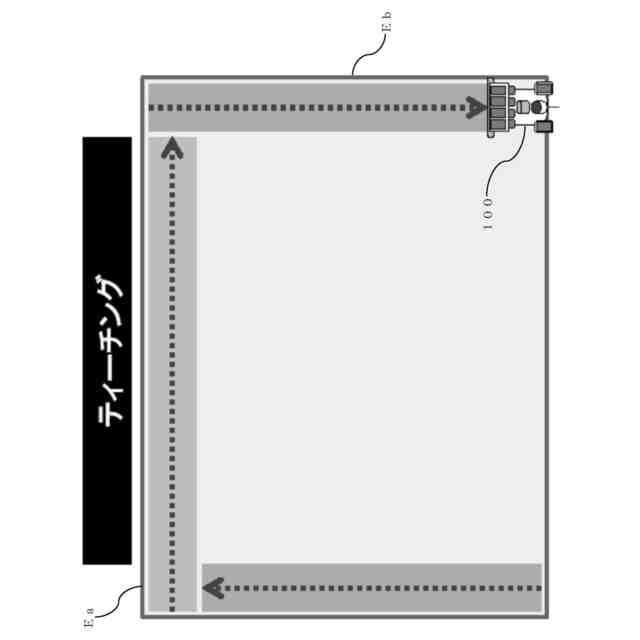
本発明における実施の形態の田植え機のロボット田植え機自動調整機能の説明図
本発明における実施の形態の田植え機のロボット田植え機自動調整機能の説明図(その一)
本発明における実施の形態の田植え機のロボット田植え機自動調整機能の説明図(その二)
本発明における実施の形態の田植え機のロボット田植え機自動調整機能の説明図(その三)
本発明における実施の形態の田植え機のロボット田植え機枕地工程の説明図(その一)
本発明における実施の形態の田植え機のロボット田植え機枕地工程の説明図(その二)
本発明における実施の形態の田植え機のロボット田植え機枕地工程の説明図(その三)
本発明における実施の形態の田植え機のロボット田植え機エラー表示の説明図
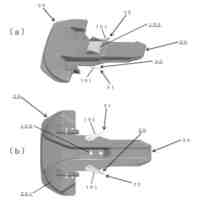
本発明における実施の形態の田植え機のロボット田植え機舵角センサーセット方法の説明図
(a)本発明における実施の形態の田植え機のロボット田植え機自動作業開始位置設定の説明図(その一)、(b)本発明における実施の形態の田植え機のロボット田植え機自動作業開始位置設定の説明図(その二)
本発明における実施の形態の田植え機のロボット田植え機アシスト機能の説明図(その一)
本発明における実施の形態の田植え機のロボット田植え機アシスト機能の説明図(その二)
本発明における実施の形態の田植え機の田植え機リモートコントローラー接続状態アイコンの説明図
本発明における実施の形態の田植え機の田植え機遠隔操作状態表示の説明図
本発明における実施の形態の田植え機の田植え機作業エリア取得状態表示の説明図
本発明における実施の形態の田植え機のロボット田植え機自動走行画面レイアウトの説明図
本発明における実施の形態の田植え機の田植え機苗取り量アイコンの説明図
本発明における実施の形態の田植え機の田植え機横送り回数アイコンの説明図
本発明における実施の形態の田植え機の田植え機自動走行アイコンの説明図
本発明における実施の形態の田植え機の田植え機植付け深さアイコンの説明図
本発明における実施の形態の田植え機の田植え機油圧感度アイコンの説明図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
1か月前
井関農機株式会社
収穫機
1か月前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
育苗培地
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
苗移植機
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
苗移植機
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ