TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071518
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181744
出願日
2023-10-23
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
63/114 20060101AFI20250428BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
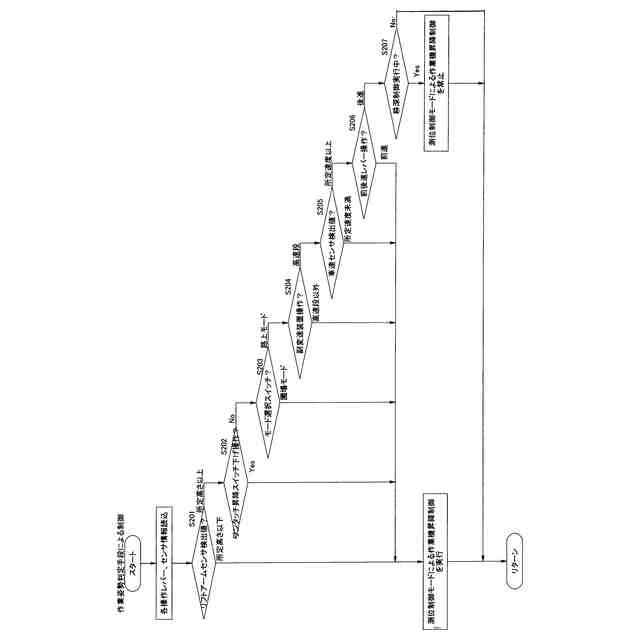
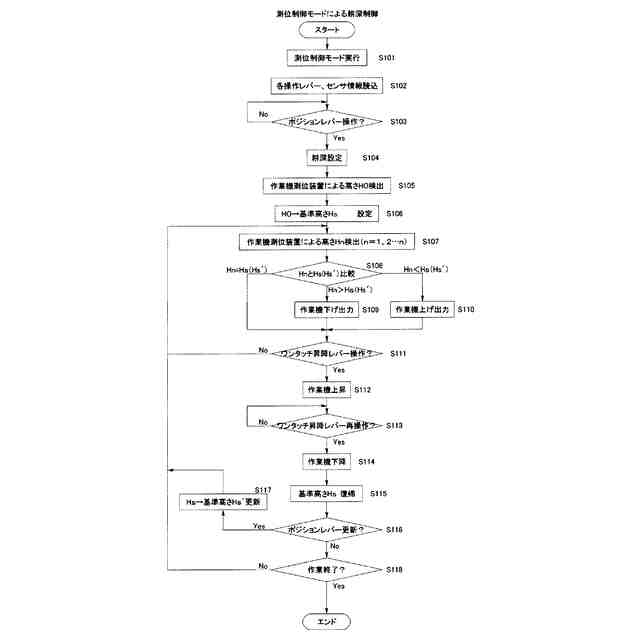
【課題】 作業機に取り付けた測位装置の測位情報に基づいて作業機の昇降位置を制御する作業車両において、意図せず作業機が自動昇降することを防止できる作業車両を提供することを目的とする。
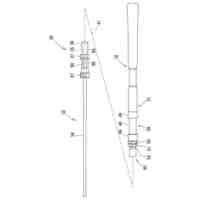
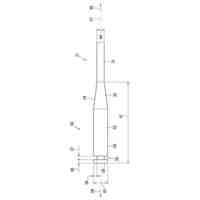
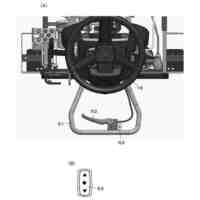
【解決手段】 走行車体2に昇降リンクPを介して昇降可能に作業機Wを装着し、作業機Wの高さ位置を測定する作業機測位装置31を備え、制御装置40には作業機測位装置31で得られる検出高さHnを基準高さHs,Hs´に保持すべく作業機Wを昇降制御する測位制御モードを備える作業車両において、作業姿勢判定手段Dを設け、作業機Wが所定の高さ以下と判定する場合に測位制御モードによる昇降制御を行うようにした。
【選択図】 図10
特許請求の範囲
【請求項1】
走行車体(2)に昇降リンク(P)を介して昇降可能に作業機(W)を装着し、作業機(W)の高さ位置を測定する作業機測位装置(31)を備え、制御装置(40)には作業機測位装置(31)で得られる検出高さ(Hn)を基準高さ(Hs,Hs´)に保持すべく作業機(W)を昇降制御する測位制御モードを備える作業車両において、作業姿勢判定手段(D)を設け、作業機(W)が所定の高さ以下と判定する場合に測位制御モードによる昇降制御を行うことを特徴とする作業車両。
続きを表示(約 650 文字)
【請求項2】
作業姿勢判定手段(D)は、リフトアーム(122)に設けるリフトアームセンサ(26)の所定角度検出に基づき測位制御モードによる昇降制御を行うようにした請求項1に記載の作業車両。
【請求項3】
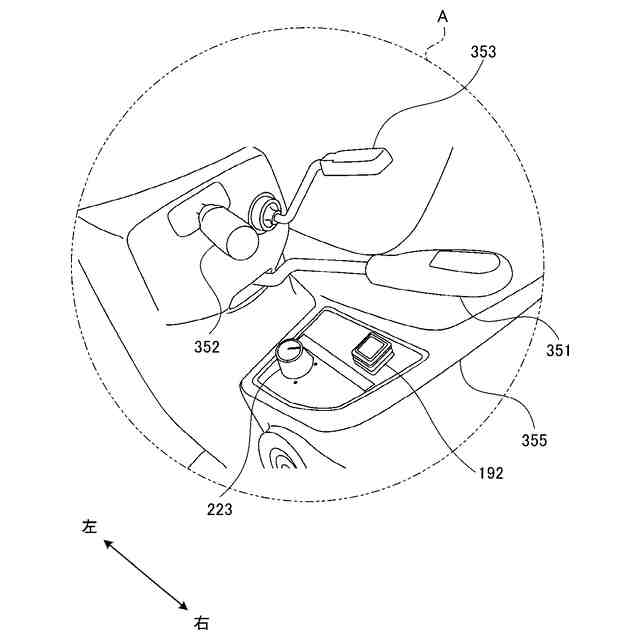
作業姿勢判定手段(D)は、作業機昇降スイッチ(353)が下げ操作されている場合に測位制御モードによる昇降制御を行うようにした請求項1に記載の作業車両。
【請求項4】
作業姿勢判定手段(D)は、圃場を走行する圃場モードと路上を走行する路上モードとを選択できるモード選択スイッチ(223)が圃場モードを選択する場合に測位制御モードによる昇降制御を行うようにした請求項1に記載の作業車両。
【請求項5】
副変速装置(74)を備え、作業姿勢判定手段(D)は、副変速装置(74)が高速位置に操作されている場合には昇降制御の実行を禁止する構成とした請求項1に記載の作業車両。
【請求項6】
走行車体(2)の車速を検出する車速センサ(24)を備え、作業姿勢判定手段(D)は、車速が所定以上の場合に測位制御モードによる昇降制御の実行を禁止する構成とした請求項1に記載の作業車両。
【請求項7】
作業機(W)の昇降制御として耕深制御、ポジション制御又は抗力制御を備え、作業姿勢判定手段(D)は、耕深制御、ポジション制御又は抗力制御を優先し測位制御モードによる昇降制御の実行を禁止する構成とした請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
作業機に取り付けた作業機測位装置により得られる測位情報に基づいて作業機の昇降位置を制御する測位制御モードと、カバーセンサの検知結果に基づいて作業機の昇降位置を制御するカバー制御モードとを有し、カバー制御モードで作業したときの高さ位置の平均値を、測位制御モードにおける高さ制御の基準値として昇降制御する構成が公知である(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-193899号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1によると、測位制御モードによる昇降位置を制御することで精度の向上が図れる。ところでカバーセンサの検知結果に基づいて作業機の昇降位置を制御するカバー制御モードにおいては、ロータリ耕耘機後部のカバーの回動角をフィードバックして地表に対する耕耘深さを一定に制御する方法であったため、作業機が地面に接地していない場合カバーの角度は基本的に変化しないので、自動で昇降することはなかった。しかしながら、作業機測位装置に取り付けた測位情報に基づいて作業機の昇降位置を制御する場合、作業機が地面に接地していなくても走行車体が坂道を走行するときなどでは車体自体の高さ位置が変化するため、作業機が自動で昇降動してしまう恐れがあった。
【0005】
本発明は、作業機に取り付けた測位装置の測位情報に基づいて作業機の昇降位置を制御する作業車両において、意図せず作業機が自動昇降することを防止できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、上記課題を解決すべく次のような技術的手段を講じた。
【0007】
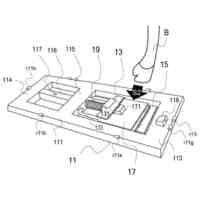
請求項1に記載の発明は、走行車体2に昇降装置12によって昇降可能に作業機Wを装着し、作業機Wの高さ位置を測定する作業機測位装置31を備え、制御装置40には作業機測位装置31で得られる検出高さHnを基準高さHs,Hs´に保持すべく作業機Wを昇降制御する測位制御モードを備える作業車両において、作業姿勢判定手段Dを設け、作業機Wが所定の高さ以下と判定する場合に測位制御モードによる昇降制御を行う。
【0008】
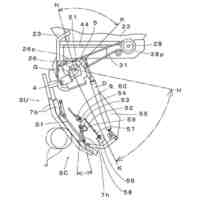
請求項2に記載の発明は、請求項1に記載の発明において、作業姿勢判定手段Dは、リフトアーム122に設けるリフトアームセンサ26の所定角度検出に基づき測位制御モードによる昇降制御を行う。
【0009】
請求項3に記載の発明は、請求項1に記載の発明において、作業姿勢判定手段Dは、作業機昇降スイッチ353が下げ操作されている場合に測位制御モードによる昇降制御を行う。
【0010】
請求項4に記載の発明は、請求項1に記載の発明において、作業姿勢判定手段Dは、圃場を走行する圃場モードと路上を走行する路上モードとを選択できるモード選択スイッチ223が圃場モードを選択する場合に測位制御モードによる昇降制御を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
苗キャップ
2か月前
個人
釣り用ルアー
21日前
個人
釣り用ルアー
21日前
個人
播種機
1か月前
個人
尿処理材
1か月前
個人
獣捕獲罠装置
1日前
株式会社アテックス
草刈機
6日前
井関農機株式会社
作業車両
22日前
株式会社アテックス
草刈機
1か月前
株式会社シマノ
釣竿
5日前
個人
ペット用オムツカバー
5日前
個人
水耕栽培システム
1か月前
井関農機株式会社
圃場作業機
23日前
株式会社シマノ
釣り具
27日前
井関農機株式会社
コンバイン
27日前
個人
室内栽培システム
1か月前
有限会社マイク
囲い罠
27日前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
移植機
1か月前
株式会社西部技研
空調システム
1か月前
井関農機株式会社
歩行型管理機
21日前
井関農機株式会社
圃場管理装置
1か月前
個人
植物栽培装置
7日前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社シマノ
釣竿
22日前
井関農機株式会社
作業車両
1か月前
株式会社ダイイチ
海苔網の酸処理船
1か月前
株式会社村岡水産
釣り用ワーム
21日前
株式会社パクマケ
植栽用遮光板
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ