TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044031
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151707
出願日
2023-09-19
発明の名称
苗移植機
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
63/10 20060101AFI20250325BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】畦際から苗の植え付けを開始する操作を確実かつ容易に行うことができる苗移植機を提供すること。
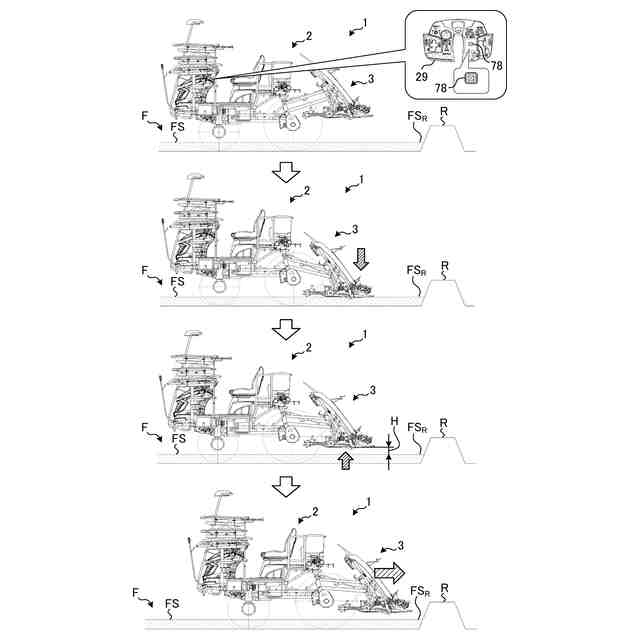
【解決手段】実施形態に係る苗移植機は、走行車体と、苗植付部と、昇降制御部とを備える。走行車体は、圃場内を走行可能である。苗植付部は、走行車体の後方に昇降可能に設けられる。苗植付部は、下降した状態で走行車体の前進走行中に圃場の土壌面に苗を植え付ける。昇降制御部は、苗植付部の昇降制御を行う。昇降制御部は、苗植付部を圃場内の畦際へ寄せてから苗の植え付けを開始するために走行車体を畦際へ向けて後進走行させる場合に、苗植付部を、土壌面に接地させず、かつ、土壌面から近い高さに位置させる特殊昇降制御を行う。
【選択図】図4
特許請求の範囲
【請求項1】
圃場内を走行可能な走行車体と、
前記走行車体の後方に昇降可能に設けられ、下降した状態で前記走行車体の前進走行中に圃場の土壌面に苗を植え付ける苗植付部と、
前記苗植付部の昇降制御を行う昇降制御部と
を備え、
前記昇降制御部は、
前記苗植付部を圃場内の畦際へ寄せてから苗の植え付けを開始するために前記走行車体を前記畦際へ向けて後進走行させる場合に、前記苗植付部を、前記土壌面に接地させず、かつ、前記土壌面から近い高さに位置させる特殊昇降制御を行う
ことを特徴とする苗移植機。
続きを表示(約 1,800 文字)
【請求項2】
前記走行車体と前記苗植付部との間に設けられ、前記苗植付部を昇降駆動する昇降リンクと、
前記昇降リンクに設けられ、前記苗植付部の高さを検知する第1センサと、
前記昇降リンクを介して前記苗植付部を昇降させる場合に操作される第1操作具と
を備え、
前記昇降制御部は、
前記特殊昇降制御において、前記第1センサによって、前記第1操作具の操作によって前記苗植付部が下降して前記土壌面に接地したときの前記苗植付部の高さが検知されると、前記第1センサによって検知された高さから所定の量変化した位置まで前記苗植付部を上昇させる
ことを特徴とする請求項1に記載の苗移植機。
【請求項3】
前記昇降制御部は、
前記第1センサによって検知された高さから前記所定の量変化した位置まで前記苗植付部を上昇させる場合、前記苗植付部を上昇させる前記所定の量が調節可能である
ことを特徴とする請求項2に記載の苗移植機。
【請求項4】
前記第1操作具とは異なる操作具であり、前記昇降リンクを介して前記苗植付部を昇降させる場合に操作される第2操作具
を備え、
前記昇降制御部は、
前記特殊昇降制御へ移行するために前記第1操作具が操作された後は、前記第2操作具による前記苗植付部を下降させる操作によって、前記苗植付部を下降させて前記土壌面に接地させ、前記所定の量変化した位置まで前記苗植付部を上昇させる
ことを特徴とする請求項3に記載の苗移植機。
【請求項5】
前記苗植付部の下部に設けられるフロートと、
前記苗植付部によって苗を植え付ける場合に、前記フロートに設けられた施肥作溝器を介して前記土壌面へと肥料を排出する施肥装置と
を備え、
前記昇降制御部は、
前記苗植付部を上昇させる前記所定の量を、少なくとも前記施肥作溝器が前記土壌面と接しない高さとする
ことを特徴とする請求項4に記載の苗移植機。
【請求項6】
前記走行車体の前後方向の傾きを検知する第2センサ
を備え、
前記昇降制御部は、
前記苗植付部を前記所定の量上昇させた場合の前記第2センサによって検知された傾きに対して、この後、前記走行車体が前進走行または後進走行した場合の前記第2センサによって検知された傾きが変化した場合、前記走行車体の傾きの変化量に基づいて、前記土壌面からの高さが前記所定の量となるよう前記苗植付部の昇降制御を行う
ことを特徴とする請求項3~5のいずれか一つに記載の苗移植機。
【請求項7】
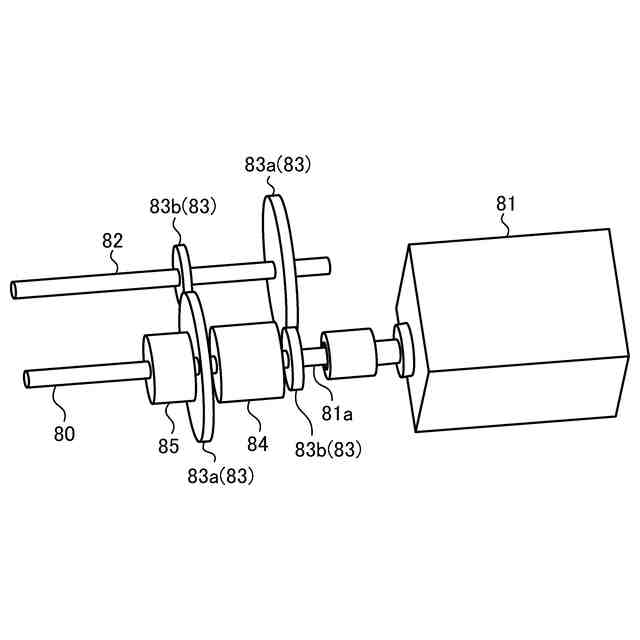
前記苗植付部によって苗を植え付ける場合に前記土壌面へと肥料を排出する施肥装置を駆動するための施肥駆動軸と、
前記施肥駆動軸へ回転動力を付与するモータ出力軸を有する1つの駆動モータと、
前記モータ出力軸および前記施肥駆動軸に対して平行に設けられる従動軸と、
前記モータ出力軸、前記施肥駆動軸および前記従動軸に設けられ、前記モータ出力軸と前記従動軸との間、前記施肥駆動軸と前記従動軸との間で動力を伝達する、それぞれ任意の歯数を有する4つの歯車と、
前記モータ出力軸および前記施肥駆動軸の間に設けられるトルクリミッタと
を備える
ことを特徴とする請求項1に記載の苗移植機。
【請求項8】
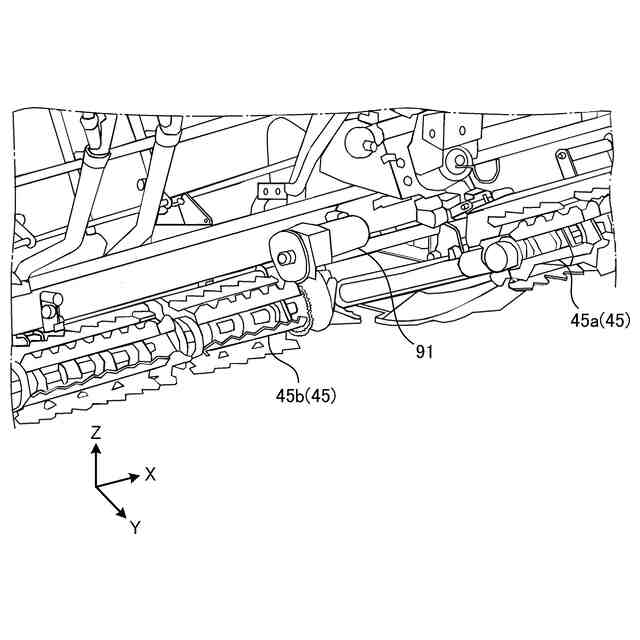
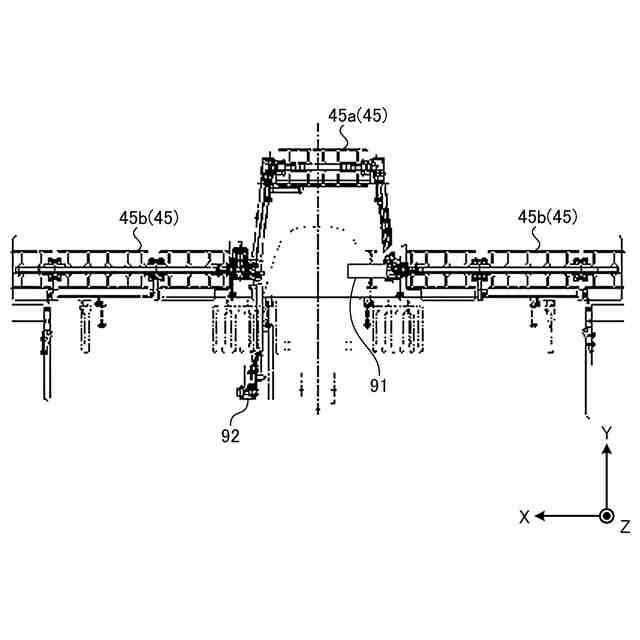
センタロータと、前記センタロータの左右方向の側方に設けられる左右のサイドロータとを有し、前記苗植付部によって苗を植え付ける場合に前記土壌面を整地する整地ロータと、
前記整地ロータへ回転駆動力を付与する回転駆動モータと、前記整地ロータへ昇降駆動力を付与する昇降駆動モータとを有し、前記整地ロータを駆動するアクチュエータと
を備え、
前記回転駆動モータは、
前記センタロータよりも後方および上方に位置し、前記サイドロータよりも左右方向の機体中央側および上方に位置し、
前記回転駆動モータおよび前記昇降駆動モータは、
いずれか一方に対して他方が左右方向の機体中央を挟んで反対側に位置する
ことを特徴とする請求項1に記載の苗移植機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、苗移植機に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
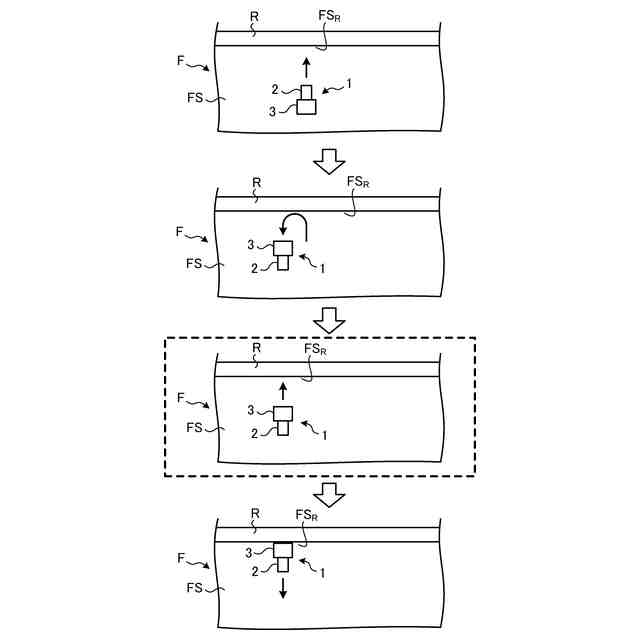
従来、機体の後部に昇降可能な苗植付部を有し、苗植付部が下降した状態で機体の前進中に圃場の土壌面に苗を植え付ける苗移植機においては、圃場の畦際から苗の植え付けを開始するために、たとえば、前進する機体が畦に近付くと、苗植付部が上昇した状態で機体を旋回させた後、苗植付部が上昇した状態で機体を後進させて畦際へ苗植付部を近付ける操作を行う(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2015-139374号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来の苗移植機は、苗植付部が畦際の適切な位置へと下降させるように操作するには熟練を必要とすることがあり、畦に極力近い位置(畦際)から苗の植え付けを開始する操作について改善の余地があった。なお、苗植付部が畦際の適切な位置へ下降されないと、畦から遠い場合は、たとえば、圃場に植え付ける苗が少なくなることで作物(稲)の収量が減少するおそれがあり、畦に近過ぎる場合は、たとえば、下降する苗植付部が畦と衝突して、畦が崩れたり苗植付部が破損したりするおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、畦際から苗の植え付けを開始する操作を確実かつ容易に行うことができる苗移植機を提供することを目的とする。
【課題を解決するための手段】
【0006】
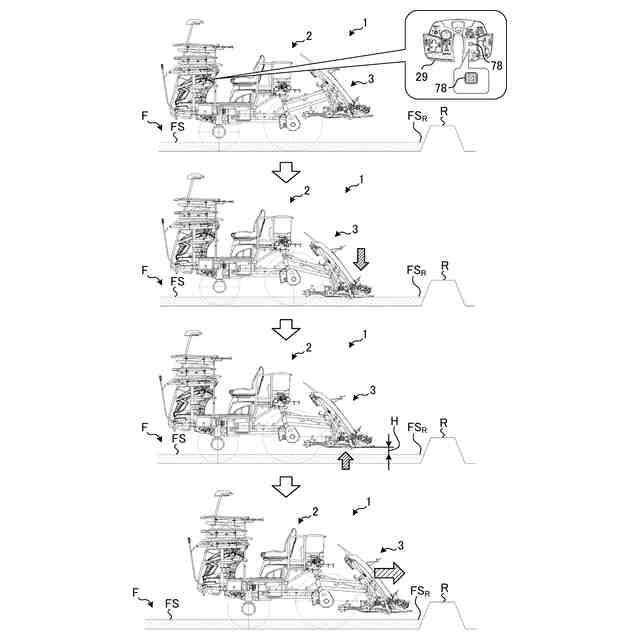
上述した課題を解決し、目的を達成するために、実施形態に係る苗移植機(1)は、圃場(F)内を走行可能な走行車体(2)と、前記走行車体(2)の後方に昇降可能に設けられ、下降した状態で前記走行車体(2)の前進走行中に圃場(F)の土壌面(FS)に苗を植え付ける苗植付部(3)と、前記苗植付部(3)の昇降制御を行う昇降制御部(100)とを備え、前記昇降制御部(100)は、前記苗植付部(3)を圃場(F)内の畦際(FS
R
)へ寄せてから苗の植え付けを開始するために前記走行車体(2)を前記畦際(FS
R
)へ向けて後進走行させる場合に、前記苗植付部(3)を、前記土壌面(FS)に接地させず、かつ、前記土壌面(FS)から近い高さに位置させる特殊昇降制御を行う。
【発明の効果】
【0007】
実施形態に係る苗移植機によれば、畦際から苗の植え付けを開始する操作を確実かつ容易に行うことができる。
【図面の簡単な説明】
【0008】
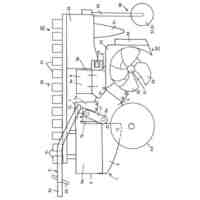
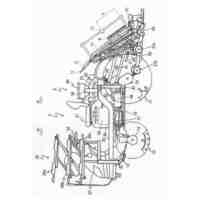
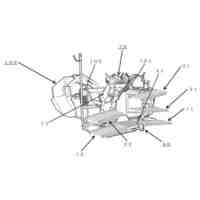
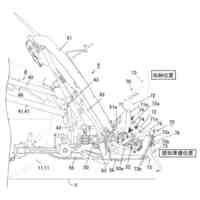
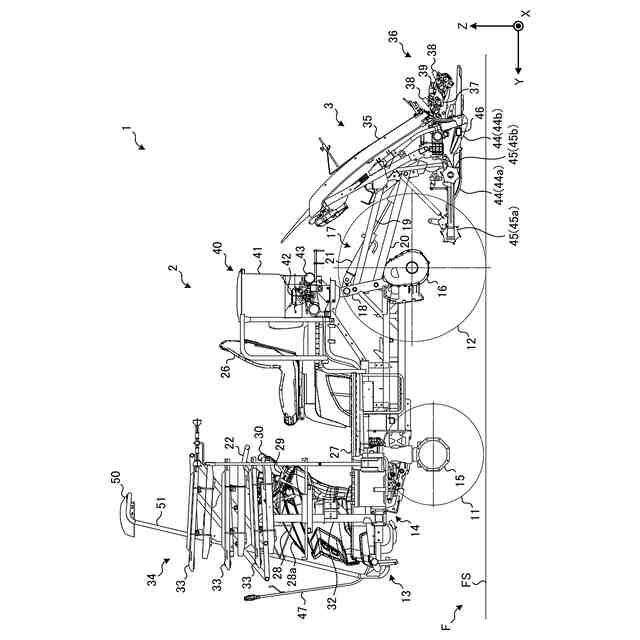
図1は、実施形態に係る苗移植機を示す概略側面図である。
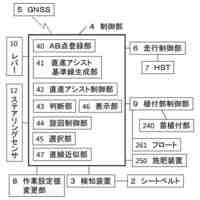
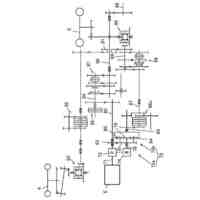
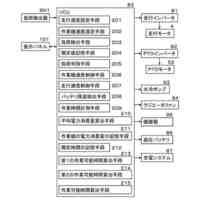
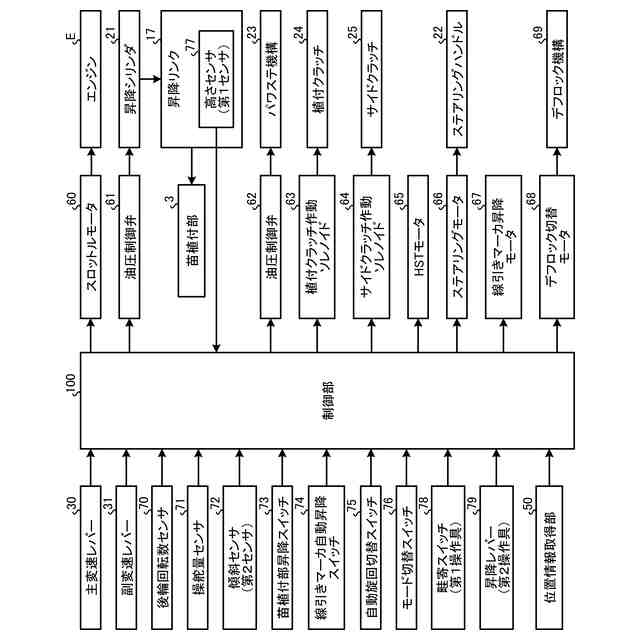
図2は、実施形態に係る苗移植機の制御系の一例を示すブロック図である。
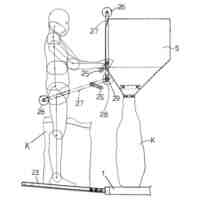
図3は、実施形態に係る苗移植機による苗の植え付け作業の説明図である。
図4は、昇降制御部による特殊昇降制御の説明図(その1)である。
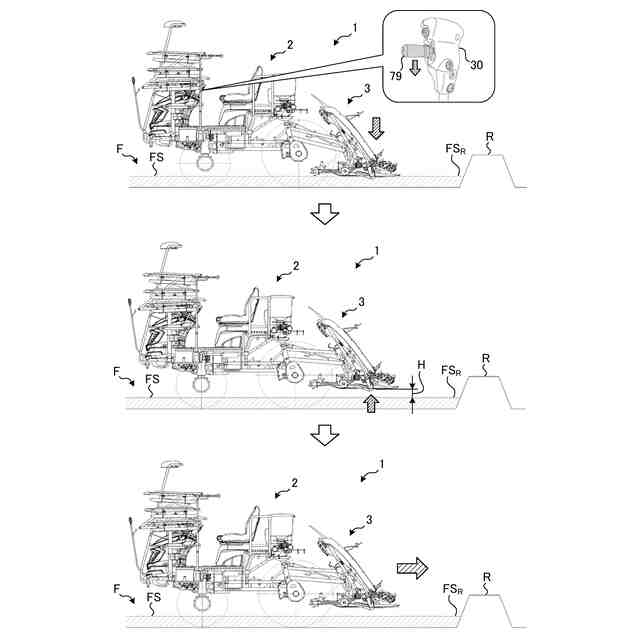
図5は、昇降制御部による特殊昇降制御の説明図(その2)である。
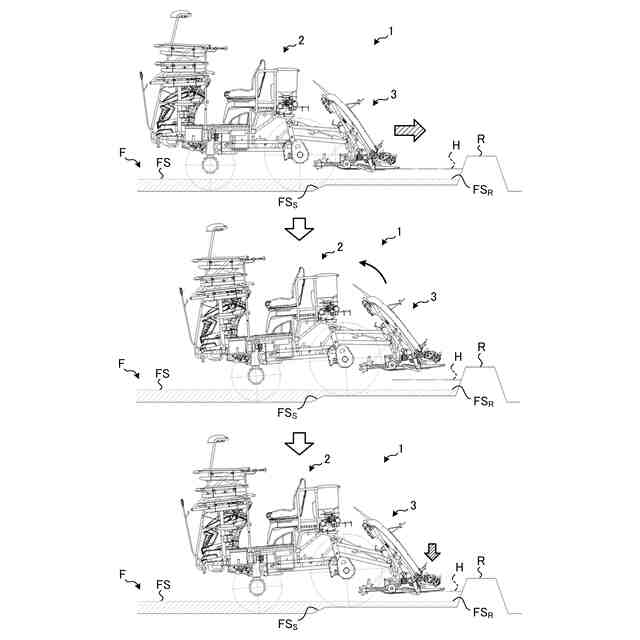
図6は、昇降制御部による特殊昇降制御の説明図(その3)である。
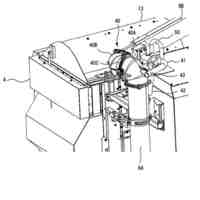
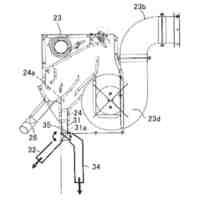
図7は、施肥駆動軸への伝動構成を示す図である。
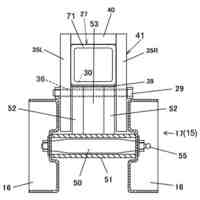
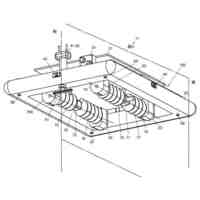
図8は、電動ロータの構成の説明図(その1)である。
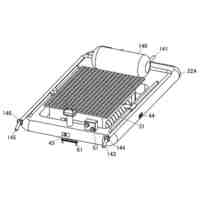
図9は、電動ロータの構成の説明図(その2)である。
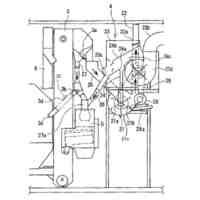
図10は、電動ロータの構成の説明図(その3)である。
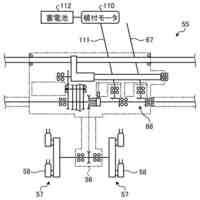
図11は、苗移植機の電動化に関する構成の説明図(その1)である。
図12は、苗移植機の電動化に関する構成の説明図(その2)である。
図13は、苗移植機の電動化に関する構成の説明図(その3)である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する苗移植機の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<苗移植機の概要>
図1を参照して実施形態に係る苗移植機1の概要について説明する。図1は、実施形態に係る苗移植機1を示す概略側面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1か月前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
精米設備
13日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
育苗培地
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
25日前
井関農機株式会社
苗移植機
3日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
20日前
井関農機株式会社
ラジエータ
24日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
25日前
井関農機株式会社
収穫作業機
9日前
井関農機株式会社
籾摺精米設備
4日前
井関農機株式会社
圃場管理装置
4日前
井関農機株式会社
収穫作業車両
1か月前
井関農機株式会社
圃場管理装置
4日前
井関農機株式会社
圃場管理装置
4日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
籾摺精米設備
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ