TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025047365
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023155820
出願日
2023-09-21
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
63/114 20060101AFI20250326BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業機を非作業姿勢に上昇させても作業機と共に昇降する測位装置が走行車体と接触しない作業車両を提供することを目的とする。
【解決手段】
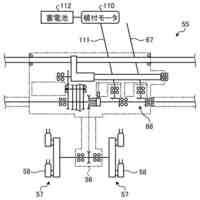
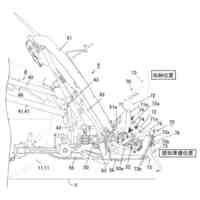
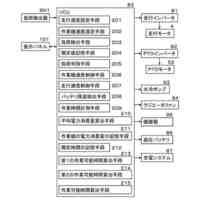
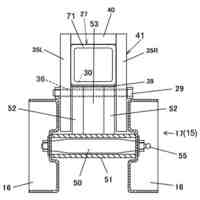
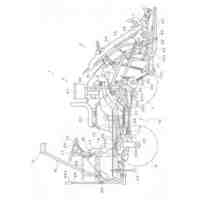
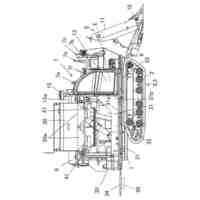
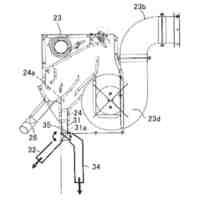
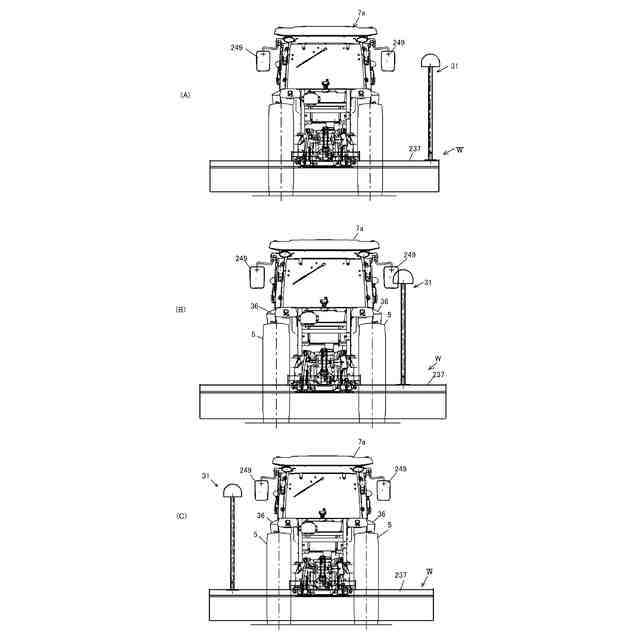
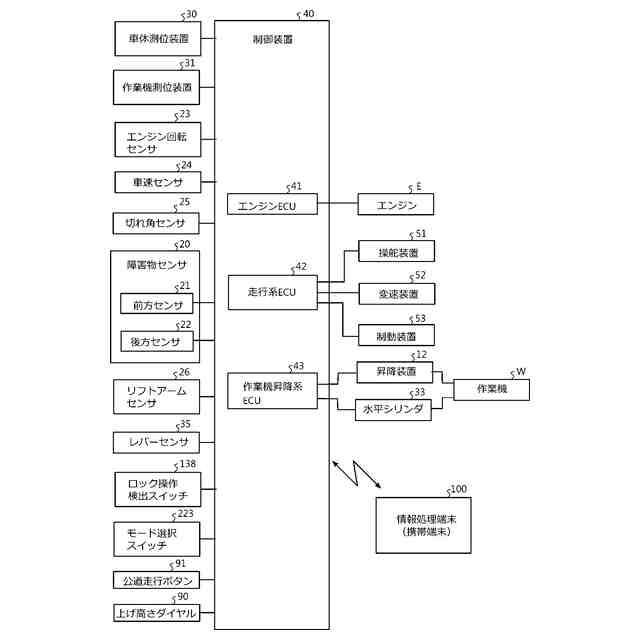
走行車体2に昇降リンクPを介して昇降可能に作業機Wを装着し、作業機Wの高さ位置を測定する作業機測位装置31を備え、制御装置40には作業機測位装置31で得られる検出高さHnを基準高さHs,Hs´に保持すべく作業機Wを昇降制御する測位制御モードを備える作業車両において、前記作業機測位装置31を走行車体2後端の外側部よりも外側において作業機Wの昇降と連動して上下すべく設ける。また、前記作業機測位装置31を、作業機Wが接地する状態の作業姿勢において、後輪5フェンダ36の上端よりも上方に位置するようにした。
【選択図】 図12
特許請求の範囲
【請求項1】
走行車体(2)に昇降リンク(P)を介して昇降可能に作業機(W)を装着し、作業機(W)の高さ位置を測定する作業機測位装置(31)を備え、制御装置(40)には作業機測位装置(31)で得られる検出高さ(Hn)を基準高さ(Hs,Hs´)に保持すべく作業機(W)を昇降制御する測位制御モードを備える作業車両において、前記作業機測位装置(31)を走行車体(2)後端の外側部よりも外側において作業機(W)の昇降と連動して上下すべく設けることを特徴とする作業車両。
続きを表示(約 450 文字)
【請求項2】
前記作業機測位装置(31)を、作業機(W)が接地する状態の作業姿勢において、後輪(5)フェンダ(36)の上端よりも上方に位置するようにした請求項1に記載の作業車両。
【請求項3】
走行車体(2)に昇降リンク(P)を介して昇降可能に作業機(W)を装着し、作業機(W)の高さ位置を測定する作業機測位装置(31)を備え、制御装置(40)には作業機測位装置(31)で得られる検出高さ(Hn)を基準高さ(Hs,Hs´)に保持すべく作業機(W)を昇降制御する測位制御モードを備える作業車両において、作業機測位装置(31)を、走行車体(2)の左右中央部に配置し、かつ少なくとも作業機測位装置(31)の下端部は作業機(W)が接地した作業姿勢において後輪5を覆うフェンダ36の上端よりも低い位置となるよう設定する作業車両。
【請求項4】
作業機測位装置(31)は作業機(W)の最上昇位置において走行車体(2)と所定の距離を確保すべく設定する請求項3に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
作業機に取り付けた測位装置の測位情報に基づいて作業機の昇降位置を制御する車両が公知である(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-193899号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
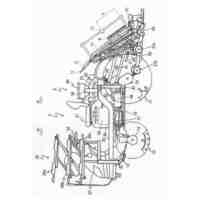
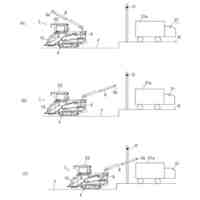
ロータリ耕耘装置などの対地作業機は接地して作業するため、圃場面付近に下げられた状態で作業が行われるが、衛星からの信号を受信する測位装置は、良好に信号を受信するために作業機の上方に設けられる必要がある。しかし、作業機を昇降させることにより走行車体との相対位置が変化し、走行車体に接触する恐れがあった。
【0005】
この発明は、走行車体に作業機を昇降自在に装着し、作業機と共に昇降する測位装置を備えた作業車両において、作業機を非作業姿勢に上昇させても測位装置が走行車体と接触しない作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、上記課題を解決すべく次のような技術的手段を講じた。
【0007】
請求項1に記載の発明は、走行車体2に昇降リンクPを介して昇降可能に作業機Wを装着し、作業機Wの高さ位置を測定する作業機測位装置31を備え、制御装置40には作業機測位装置31で得られる検出高さHnを基準高さHs,Hs´に保持すべく作業機Wを昇降制御する測位制御モードを備える作業車両において、前記作業機測位装置31を走行車体2後端の外側部よりも外側において作業機Wの昇降と連動して上下すべく設ける。
【0008】
請求項2に記載の発明は、請求項1に記載の発明において、前記作業機測位装置31を、作業機Wが接地する状態の作業姿勢において、後輪5フェンダ36の上端よりも上方に位置させた。
【0009】
請求項3に記載の発明は、走行車体2に昇降リンクPを介して昇降可能に作業機Wを装着し、作業機Wの高さ位置を測定する作業機測位装置31を備え、制御装置40には作業機測位装置31で得られる検出高さHnを基準高さHs,Hs´に保持すべく作業機Wを昇降制御する測位制御モードを備える作業車両において、作業機測位装置31を、走行車体2の左右中央部に配置し、かつ少なくとも作業機測位装置31の下端部は作業機Wが接地した作業姿勢において後輪5を覆うフェンダ36の上端よりも低い位置となるよう設定する。
【0010】
請求項4に記載の発明は、請求項3に記載の発明において、作業機測位装置31は作業機Wの最上昇位置において走行車体2と所定の距離を確保すべく設定する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
精米設備
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
苗移植機
12日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
苗移植機
28日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
コンバイン
28日前
井関農機株式会社
ラジエータ
27日前
井関農機株式会社
コンバイン
23日前
井関農機株式会社
コンバイン
今日
井関農機株式会社
EGR装置
2日前
井関農機株式会社
収穫作業機
2日前
井関農機株式会社
収穫作業機
12日前
井関農機株式会社
圃場管理装置
7日前
井関農機株式会社
籾摺精米設備
7日前
井関農機株式会社
電動作業車両
21日前
井関農機株式会社
収穫作業車両
1か月前
井関農機株式会社
籾摺精米設備
8日前
井関農機株式会社
圃場管理装置
7日前
井関農機株式会社
圃場管理装置
7日前
井関農機株式会社
脱穀装置の扱胴
1か月前
井関農機株式会社
農業用トラクタ
1か月前
井関農機株式会社
農業支援システム
7日前
井関農機株式会社
作業車両システム
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ