TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076651
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188385
出願日
2023-11-02
発明の名称
収穫作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250509BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場において、衛星測位装置に基づいて自動走行が可能となるが、作物の植え付け状態を認識できないため、作業車両の車輪が踏みつける危険性がある。
【解決手段】
複数台の撮像装置を設け、車両の一部を画像に入れ相対距離も利用することで、3次元的な寸法を補正し、圃場に植え付けされた作物の位置を検出し、自動走行を可能とした。
【選択図】図1
特許請求の範囲
【請求項1】
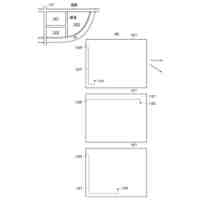
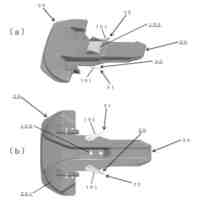
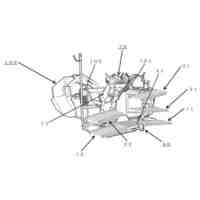
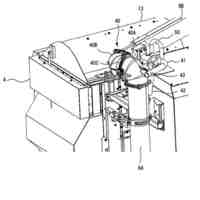
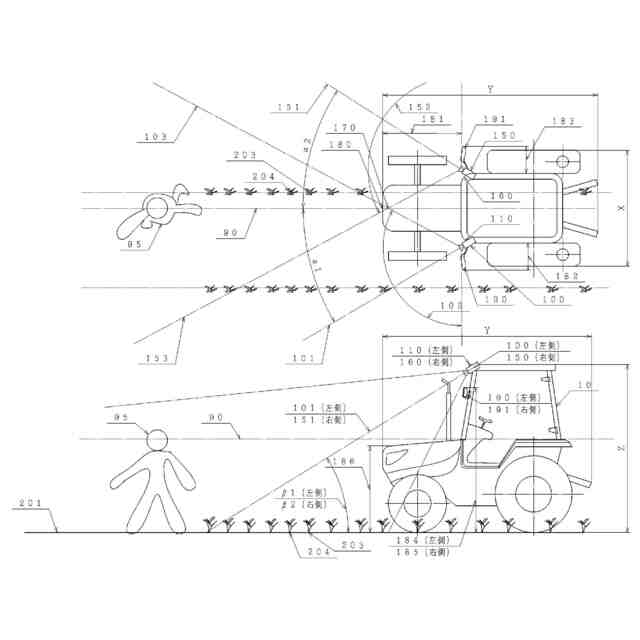
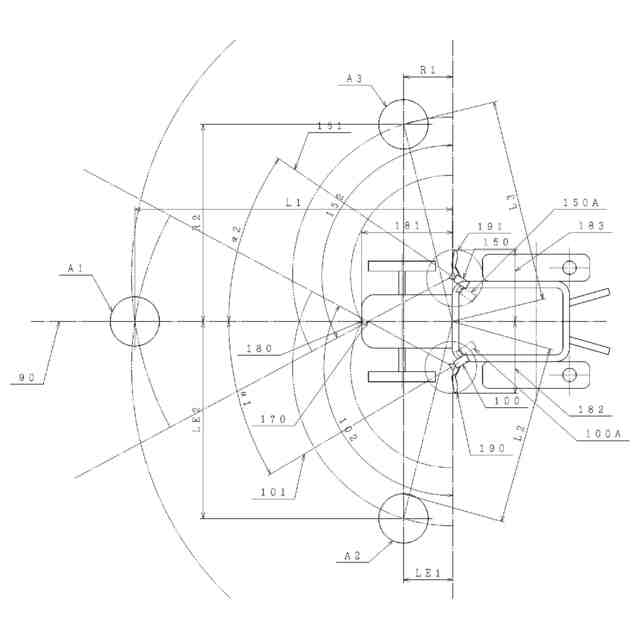
操作部を保護するフレーム構造の上方のルーフ部の前方の左端部(110)に左撮像装置(100)と右端部(160)に右撮像装置(150)を備え、
左撮像装置(100)の撮影方向の中心軸(101)は車体の進行方向軸(90)より左方向に角度(α1)、下方向に角度(β1)傾け、車体の左側の下方に焦点の中心を置き、
右撮像装置(150)の撮影方向の中心軸(151)は車体の進行方向軸(90)より右方向に角度(α2)、下方向に角度(β2)傾け、車体の右側の下方に焦点の中心を置き、
車両の幅方向寸法で前後車輪の幅寸法(X)以内に、左撮像装置(100)と右撮像装置(150)が配備され、
左撮像装置(100)の撮像の広角(102)の右端ライン(103)と、右撮像装置(150)の撮像の広角(152)の左端ライン(153)の交差点(170)が、車両のフードの前方端位置(180)よりも後方にあり、
左撮像装置(100)と右撮像装置(150)には、車両のフードの前方端位置(180)が撮像されることで、基準寸法(181)の比率演算により、
前方位置(A1)までの距離(L1)と左側方の(A2)までの距離(L2)と右側方の(A3)までの距離(L3)を計測する作業車両。
続きを表示(約 280 文字)
【請求項2】
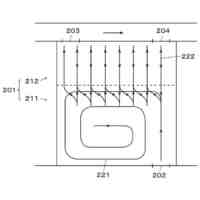
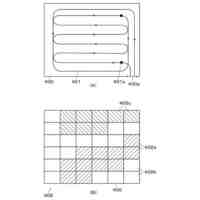
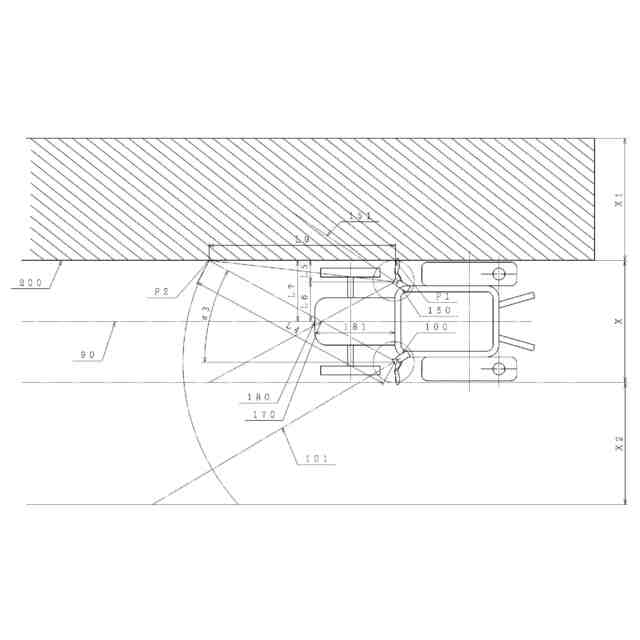
左撮像装置(100)と右撮像装置(150)の各側方の圃場部の土部の画像の違いより、未耕運部側と既耕運部側の位置を判断し、既耕運部のライン(200)を基準に自動走行する直進ラインとする 請求項1の作業車両。
【請求項3】
左撮像装置(100)と右撮像装置(150)により、緑系の位置を検出し、画像上で連続的に繋がるラインを作物の植え付けラインとして認識し、前後車輪の幅寸法(X)に照合させ、この植え付けライン位置を前後車輪の位置が重ならない位置で走行するように自動走行を行う 請求項1、及び請求項2の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の撮像装置を備え、各撮像装置の画像データを利用し合うことで、広角に撮像するだけでなく、目的物までの距離の測定や、圃場にある作物の並び等も判別する機能を持たせ、自動走行を可能とする作業業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来技術では、ステレオカメラで距離測定を行い、撮像された障害物との距離検出を行う技術があり、撮像装置の距離間隔を利用した自動走行制御がある。(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開2019-174344号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術では、ステレオカメラユニットによって取得された撮影画像から圃場面を1つの基準面とする3次元座標系で展開された3次元点群データを生成する距離情報生成部と、圃場刈取り情報作成部と障害物推定手段と、前記3次元点群データと前記障害物推定手段による推定結果とに基づいて、前記障害物を検出するとともに前記障害物と前記機体との位置関係を算出する障害物検出部とを備えた技術がある。
【0005】
しかし、作業車両にあるステレオカメラと圃場間の高さ位置が、圃場の起伏により一定ではないため、距離計算に誤差が生じ、斜方向距離では、直線的なライン取りを行うことができなかった。
【0006】
本発明はステレオカメラの合成される基準位置を作業車両の先端の一部に重なるように配置させることで、相対的な尺度補正を入れることにより、圃場の起伏による、撮像装置の距離計算に誤差が生じないように対応できる作業車両を提供することを課題とする。
【課題を解決するための手段】
【0007】
第一の発明は、次の技術手段により解決される。
【0008】
操作部を保護するフレーム構造の上方のルーフ部の前方の左端部110に左撮像装置100と右端部160に右撮像装置150を備え、左撮像装置100の撮影方向の中心軸101は車体の進行方向軸γより左方向に角度α1、下方向に角度β1傾け、車体の左側の下方に焦点の中心を置き、右撮像装置150の撮影方向の中心軸151は車体の進行方向軸γより右方向に角度α2、下方向に角度β2傾け、車体の右側の下方に焦点の中心を置き、車両の幅方向寸法で前後車輪の幅寸法X以内に、左撮像装置100と右撮像装置150が配備され、左撮像装置100の撮像の広角102の右端ライン103と、右撮像装置150の撮像の広角152の左端ライン153の交差点170が、車両のフードの前方端位置180よりも後方にあり、左撮像装置100と右撮像装置150には、車両のフードの前方端位置180が撮像されることで、基準寸法181の比率演算により、前方位置A1までの距離L1と側方のA2までの距離L2と側方のA3までの距離L3を計測する作業車両。
【0009】
第二の発明は、次の技術手段により解決される。
【0010】
左撮像装置100と右撮像装置150の各側方の圃場部の土部の画像の違いより、未耕運部側と既耕運部側の位置を判断し、既耕運部のライン200を基準に自動走行する直進ラインとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
今日
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
苗移植機
20日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
今日
井関農機株式会社
苗移植機
14日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
精米設備
24日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
収穫作業機
20日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
8日前
井関農機株式会社
EGR装置
10日前
井関農機株式会社
収穫作業機
10日前
井関農機株式会社
籾摺精米設備
15日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
籾摺精米設備
16日前
井関農機株式会社
圃場管理装置
7日前
井関農機株式会社
圃場管理装置
1日前
井関農機株式会社
電動作業車両
29日前
井関農機株式会社
苗移植作業機
7日前
井関農機株式会社
圃場管理装置
15日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ