TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088531
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203295
出願日
2023-11-30
発明の名称
農業支援システム
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01B
69/00 20060101AFI20250604BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】複数の作業車両が、圃場マップの共有によって作業の質を向上するとともに、圃場を均一に耕耘できる農業支援システムを提供する。
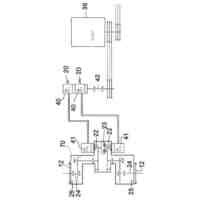
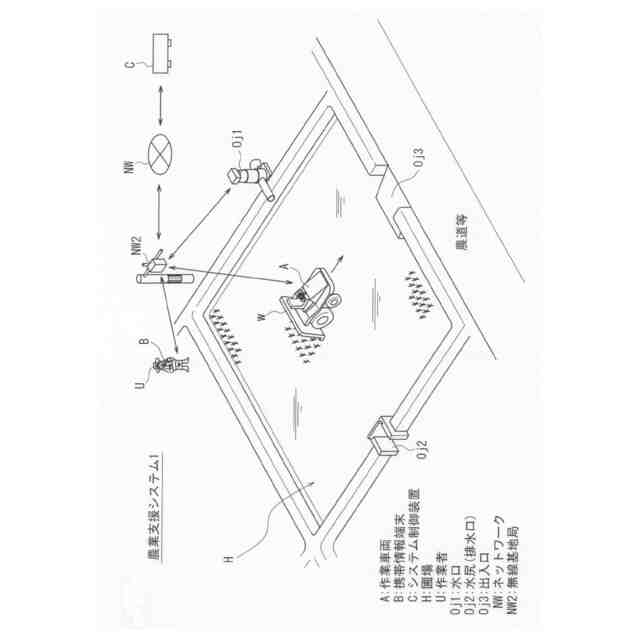
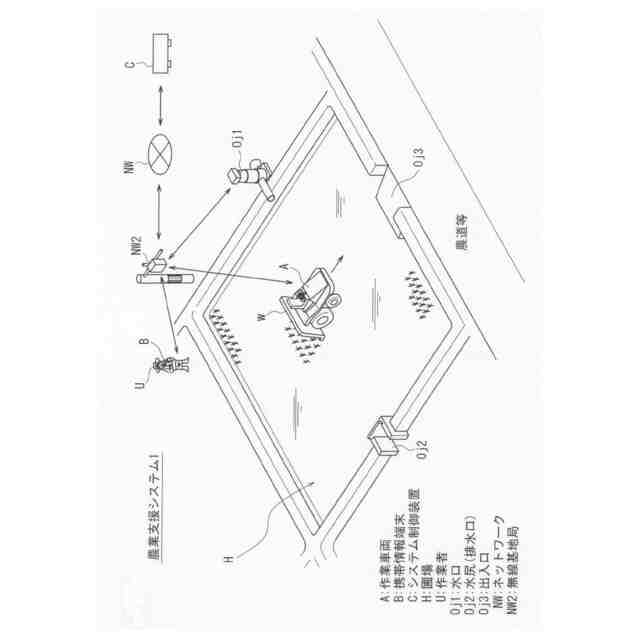
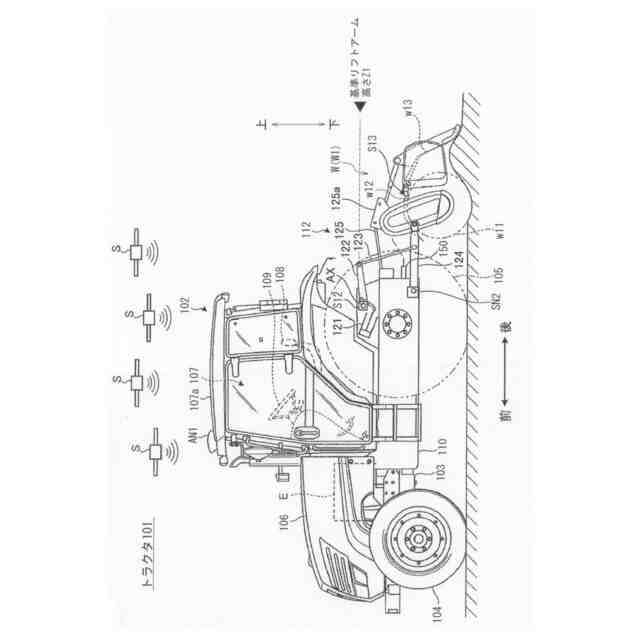
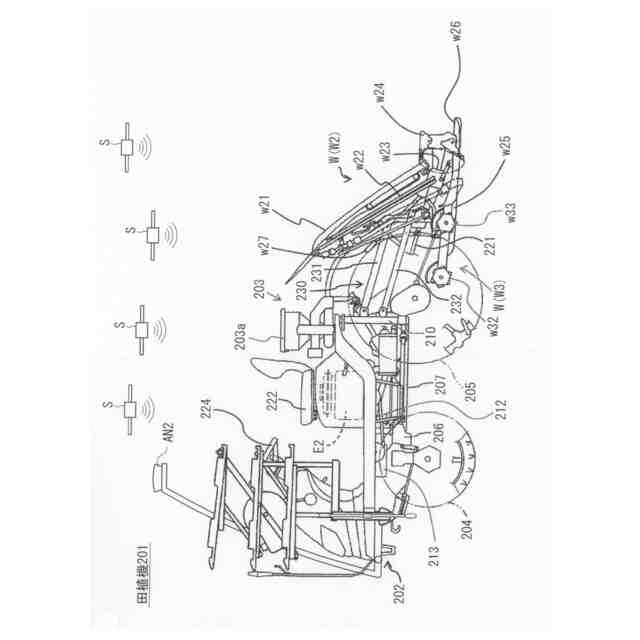
【解決手段】複数の作業車両Aと、携帯情報端末Bと、システム制御装置Cとを備え、これらが通信ネットワークNWに接続され、システム制御装置Cは、作業機高さ調節手段と、作業マップ作成手段とを備え、複数の作業車両Aは、トラクタと、田植機とを含み、作業マップは、耕耘情報が記録された耕耘情報マップと、田植情報が記録された田植情報マップとを含んで構成され、作業機高さ調節手段は、トラクタの作業中の区画を判定し、作業中の区画に記録された耕耘情報及び田植情報において、リフトアーム高さが第1判定高さより低く、動力負荷が判定負荷値より大きく、フロート高さが第2判定高さより低い場合、作業機の高さを上げるよう調節する農業支援システムによって、上記課題が解決される。
【選択図】図1
特許請求の範囲
【請求項1】
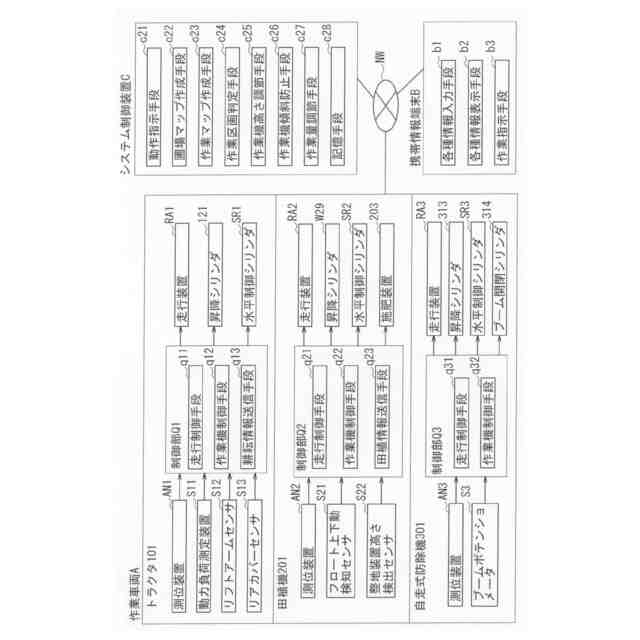
圃場を走行しつつ作業機によって農作業を行う複数の作業車両と、作業者から農作業の指示や設定に関する各種操作を受け付ける携帯情報端末と、農作業の支援において各種制御を司るシステム制御装置とを備え、これらが通信ネットワークを介して接続され、互いに情報を送受可能に構成された農業支援システムであって、
前記システム制御装置は、前記作業機の高さを指示調節する作業機高さ調節手段と、圃場を区画化した地図データであって、各区画に情報を記録可能な作業マップを作成する作業マップ作成手段とを備え、
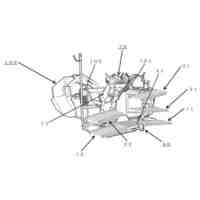
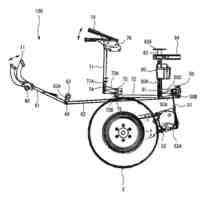
前記複数の作業車両は、圃場を耕耘するトラクタと、田植えを行う田植機とを含み、
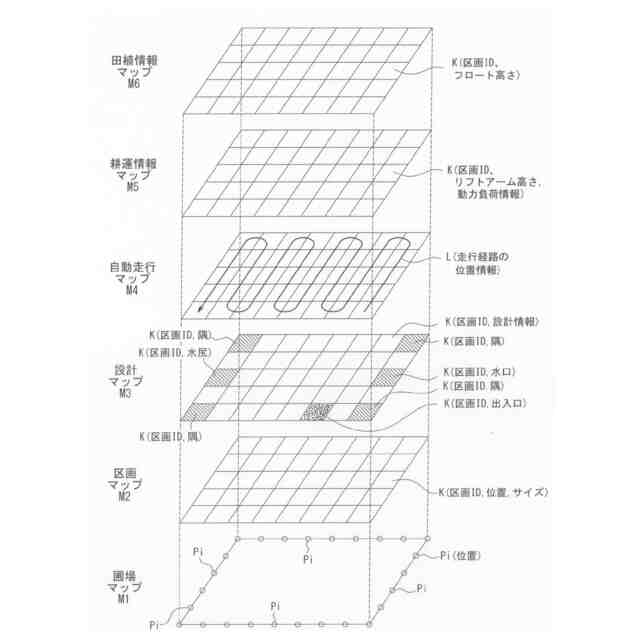
前記作業マップは、前記トラクタの作業に基づき圃場の区画毎に耕耘情報が記録された耕耘情報マップと、前記田植機の作業に基づき圃場の区画毎に田植情報が記録された田植情報マップとを含んで構成され、
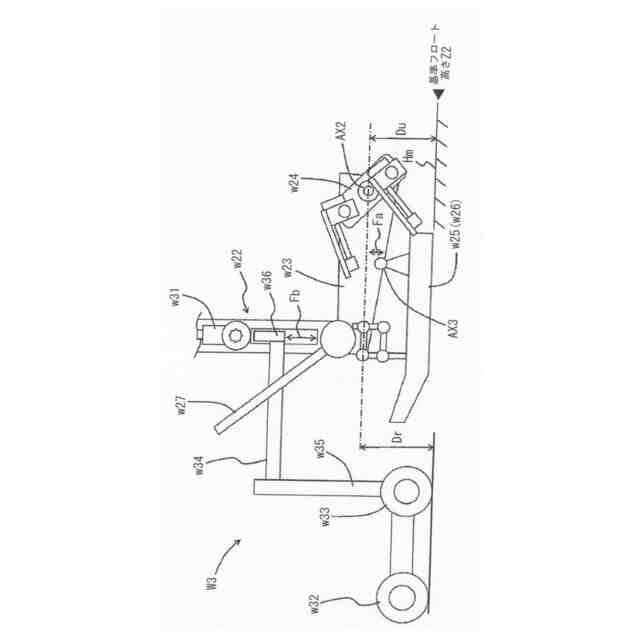
前記作業機高さ調節手段は、前記トラクタの作業中において、前記トラクタから位置情報を取得して作業中の区画を判定するととともに、前記耕耘情報マップ及び前記田植情報マップを参照し、作業中の区画に記録された前記耕耘情報及び前記田植情報において、リフトアーム高さが所定の第1判定高さより低く、動力負荷が所定の判定負荷値より大きく、フロート高さが所定の第2判定高さより低い場合、前記トラクタの作業機の高さを上げるよう調節することを特徴とする農業支援システム。
続きを表示(約 820 文字)
【請求項2】
前記作業マップは、圃場の設計を示す設計マップを含み、
前記作業マップ作成手段は、前記設計マップの作成において、圃場の各区画に、少なくとも、圃場の水口、水尻、出入口を示す情報を記録可能に構成され、
前記システム制御装置は、前記トラクタの作業中において、前記トラクタから位置情報を取得して作業中の区画を判定するととともに、前記設計マップを参照し、前記作業中の区画に、水口、水尻、出入口のいずれかを示す情報が記録されているとき、前記トラクタの作業機の高さを下げるよう調節することを特徴とする請求項1に記載の農業支援システム。
【請求項3】
前記システム制御装置は、前記田植機の作業中において、前記田植機から位置情報を取得して作業中の区画を判定するととともに、前記設計マップを参照し、前記作業中の区画に、水口、水尻、出入口のいずれかを示す情報が記録されているとき、前記田植機の施肥装置の施肥量を減少させることを特徴とする請求項2に記載の農業支援システム。
【請求項4】
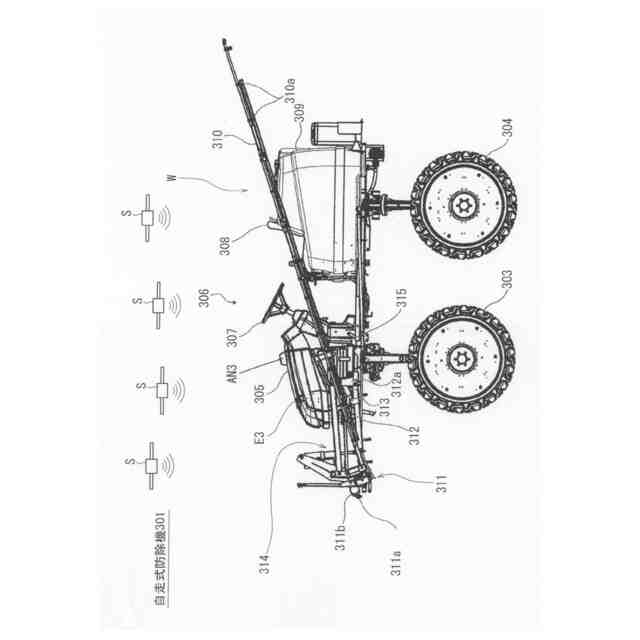
前記複数の作業車両は、圃場に防除用の薬液を散布する自走式防除機を含み、
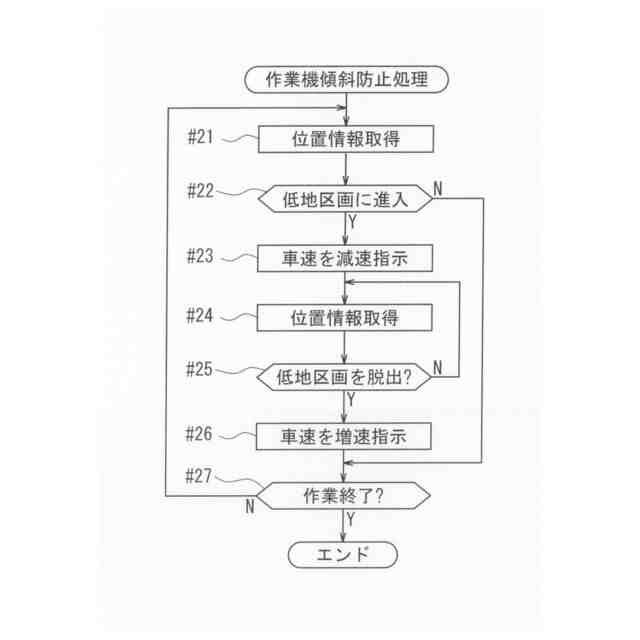
前記システム制御装置は、作業機の傾斜を防止する作業機傾斜防止手段を備え、
前記作業機傾斜防止手段は、前記自走式防除機の作業中において、前記自走式防除機から位置情報を取得して作業中の区画を判定するととともに、次に進入する区画を判定し、
さらに、前記耕耘情報マップ及び前記田植情報マップを参照し、前記次に進入する区画に記録された前記耕耘情報及び前記田植情報において、リフトアーム高さが所定の第1判定高さより低く、動力負荷が所定の判定負荷値より大きく、フロート高さが所定の第2判定高さより低い場合、前記自走式防除機の車速を下げるよう調節することを特徴とする請求項1から請求項3のいずれか1項に記載の農業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場マップに基づき作業を行う農業支援システムに関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、圃場マップを利用した種々の農業支援システムが知られている。圃場マップは、圃場を区画に分けた位置情報を含む地図データであり、それぞれの区画に、作業機の制御量や、肥沃度等の圃場の評価値を、紐づけて記録することで、作業や分析に役立てることができるものである(例えば、下記特許文献1~7参照)。
【0003】
例えば、農業支援システムの技術分野において、圃場マップの情報を用い、圃場内において、作業車両を自動走行させ、所定の時間間隔で、作業車両の位置情報を取得することで、作業車両が作業を行っている圃場の区画を判定し、その判定された区画に紐づけられた目標の制御量となるように、作業車両の作業機を自動制御する技術が知られている。その一例として、圃場の区画に応じて施肥量を自動コントロールする技術が知られており、このように構成された農業支援システムは、圃場の区画毎に細かく施肥量等の制御量を設定し、作業車両が、区画に応じて、施肥量等の制御量を変更することで、圃場の区画に応じた施肥が可能となっている。
【先行技術文献】
【特許文献】
【0004】
特開平11-53674号公報
特開2015-49867号公報
特開2019-187377号公報
特開2020-28224号公報
特開2022-72147号公報
特開2023-163704号公報
特開2023-164017号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の農業支援システムは、主に、単一種類の作業車両を制御することが想定されており、耕耘、田植え、防除といった作業工程に応じた複数の作業車両が、圃場マップを共有することが想定されておらず、複数の作業車両の作業の質を総合的に向上するために、改善の余地が存在するものであった。また、耕耘によって圃場面を均一にすることは苗の倒伏等を防止する上で重要であるが、従来の農業支援システムは、圃場における耕耘の状況を評価する情報を管理しておらず、圃場の過剰な深耕を有効に防止できるものでなかった。
【0006】
そこで、本発明は、このような問題を解消し、耕耘、田植え、防除といった作業工程に応じた複数の作業車両が、圃場マップを共有することで、複数の作業車両の作業の質を総合的に向上するとともに、圃場の過剰な深耕を有効に防止して、圃場を均一に耕耘することのできる農業支援システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するため、第1の発明は、
圃場を走行しつつ作業機によって農作業を行う複数の作業車両と、作業者から農作業の指示や設定に関する各種操作を受け付ける携帯情報端末と、農作業の支援において各種制御を司るシステム制御装置とを備え、これらが通信ネットワークを介して接続され、互いに情報を送受可能に構成された農業支援システムであって、
前記システム制御装置は、前記作業機の高さを指示調節する作業機高さ調節手段と、圃場を区画化した地図データであって、各区画に情報を記録可能な作業マップを作成する作業マップ作成手段とを備え、
前記複数の作業車両は、圃場を耕耘するトラクタと、田植えを行う田植機とを含み、
前記作業マップは、前記トラクタの作業に基づき圃場の区画毎に耕耘情報が記録された耕耘情報マップと、前記田植機の作業に基づき圃場の区画毎に田植情報が記録された田植情報マップとを含んで構成され、
前記作業機高さ調節手段は、前記トラクタの作業中において、前記トラクタから位置情報を取得して作業中の区画を判定するととともに、前記耕耘情報マップ及び前記田植情報マップを参照し、作業中の区画に記録された耕耘情報及び田植情報において、リフトアーム高さが所定の第1判定高さより低く、動力負荷が所定の判定負荷値より大きく、フロート高さが所定の第2判定高さより低い場合、前記トラクタの作業機の高さを上げるよう調節することを特徴とする農業支援システムを提供する。
【0008】
上記第1の発明によれば、
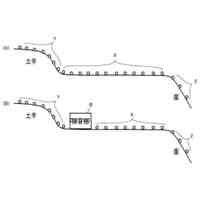
複数の作業車両が、作業マップを共有して作業することで、複数の作業車両の作業の質を総合的に向上できるとともに、システム制御装置が、作業マップを参照し、所定条件が充足されると、トラクタの作業機の高さを上げるよう調節することで、圃場の過剰な深耕を有効に防止して、圃場を均一に耕耘することができる。すなわち、圃場において、窪みが発生している地点においては、通常に比べ、リフトアーム高さは低く、動力負荷は大きく、フロート高さは低くなるためである。このように、トラクタ及び田植機の作業による情報を活用することで、より正確に、圃場の状態を判断することができる。
【0009】
第2の発明は、上記第1の発明の構成に加え、
前記作業マップは、圃場の設計を示す設計マップを含み、
前記作業マップ作成手段は、前記設計マップの作成において、圃場の各区画に、少なくとも、圃場の水口、水尻、出入口を示す情報を記録可能に構成され、
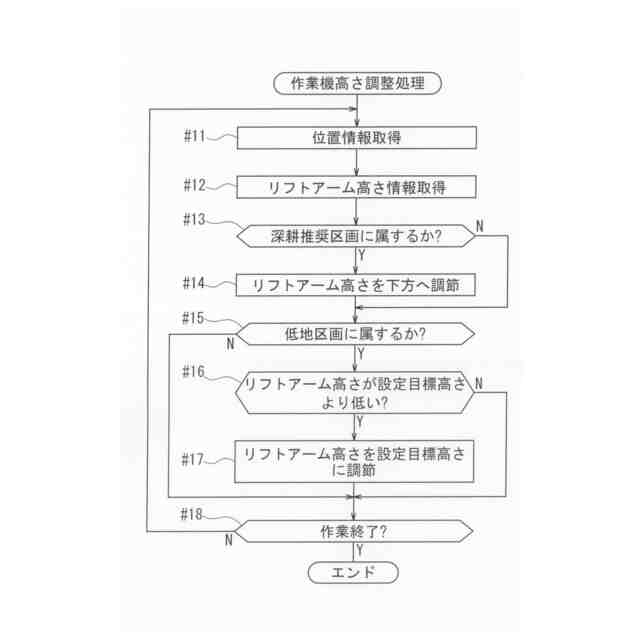
前記システム制御装置は、前記トラクタの作業中において、前記トラクタから位置情報を取得して作業中の区画を判定するととともに、前記設計マップを参照し、前記作業中の区画に、水口、水尻、出入口のいずれかを示す情報が記録されているとき、前記トラクタの作業機の高さを下げるよう調節することを特徴とする。
【0010】
第2の発明によれば、上記第1の発明の効果に加え、
圃場の出入口、水口、水尻は、一般に、圃場が荒れ、わだち等で圃場面が波打つ状態になりやすいため、通常より深耕が推奨されるが、システム制御装置が、圃場の出入口、水口、水尻において、トラクタの作業機の高さを下げるよう指示調節することで、通常よりも、深く耕耘を行い、圃場面を良好に均一とすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
12日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
苗移植機
26日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
調製設備
6日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
今日
井関農機株式会社
精米設備
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
乗用草刈機
5日前
井関農機株式会社
圃場作業機
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ