TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082003
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195170
出願日
2023-11-16
発明の名称
作業車両システム
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20250521BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業がいつ完了するかについて面倒な手間が要らない作業車両システムの実現。
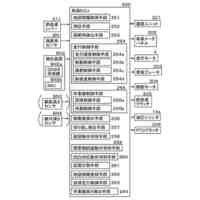
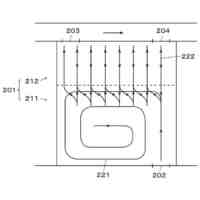
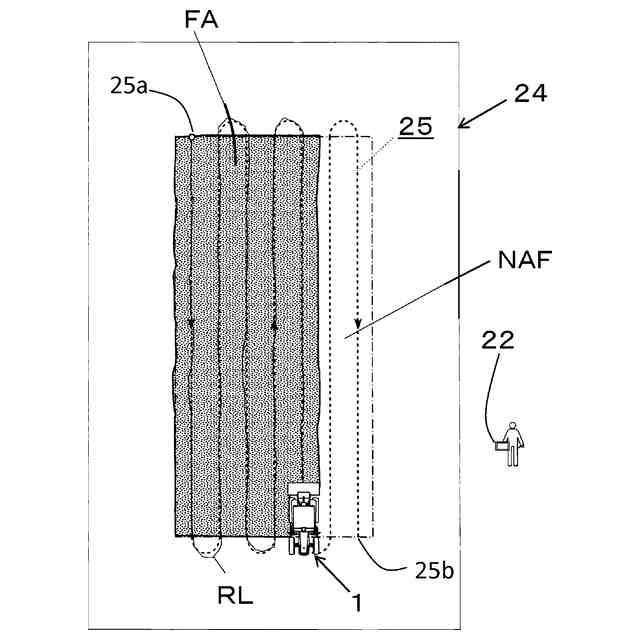
【解決手段】 測位装置20を備え予定走行経路25に沿って走行するように自動運転される作業車両1のシステムであって、作業車両1を監視する端末装置22と、端末装置22により設定された作業の目標完了時刻(TT)までに、作業車両1が予定走行経路25の到達地点25bに到達するように、作業者に各種通知する制御装置23と、を備えたことを特徴とする作業車両システム。
【選択図】 図3
特許請求の範囲
【請求項1】
測位装置を備え予定走行経路に沿って走行するように自動運転される作業車両のシステムであって、
前記作業車両を監視する端末装置と、
前記端末装置により設定された作業の目標完了時刻(TT)までに、前記作業車両が前記予定走行経路の到達地点に到達するように、作業者に各種通知する制御装置と、を備えたことを特徴とする、作業車両システム。
続きを表示(約 1,600 文字)
【請求項2】
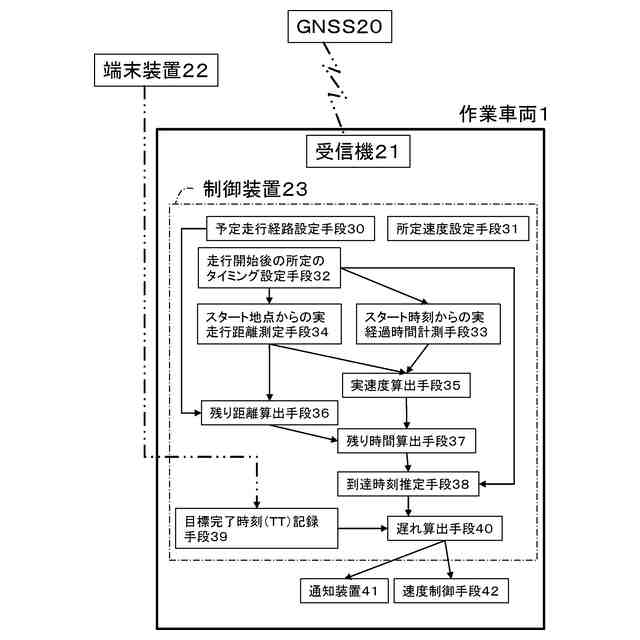
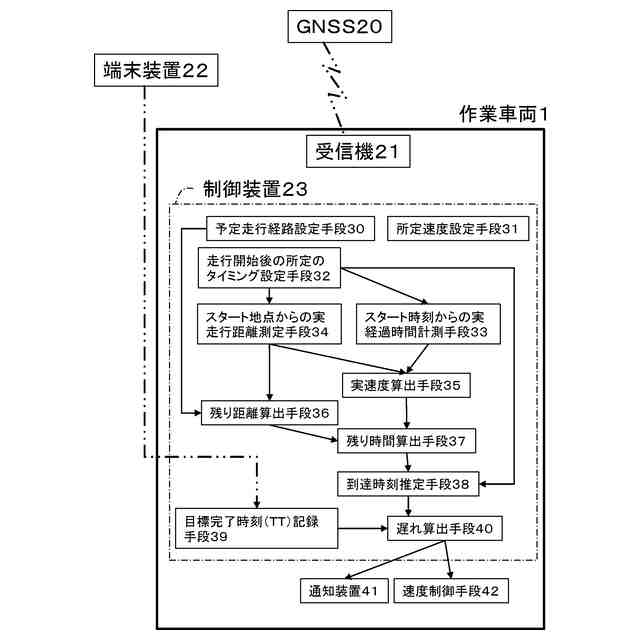
前記制御装置は、走行開始後の所定のタイミングで、前記作業車両の走行開始後からの経過時間である実走行経過時間(RT)および実際に走行した実走行距離(RL)を測定し、前記実走行経過時間(RT)および前記実走行距離(RL)に基づき、前記予定走行経路の到達地点に前記作業車両が到達する時刻(ET)を推定し、その推定された時刻(ET)を前記目標完了時刻(TT)と比較し、推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合は、作業者へ遅れていることを通知する、請求項1記載の作業車両システム。
【請求項3】
前記制御装置は、前記実走行経過時間(RT)および前記実走行距離(RL)に基づき、実際の実走行速度を算出し、前記予定走行経路の長さ(TL)と前記実走行距離(RL)に基づき、前記到達地点までの残る距離を算出し、前記実走行速度と前記残る距離に基づき、前記到達地点までの残る時間を算出し、前記所定のタイミングと前記残る時間に基づき、前記予定走行経路の到達地点に到達する時刻(ET)を推定する、請求項2記載の作業車両システム。
【請求項4】
前記制御装置は、前記推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合、前記推定された時刻(ET)を作業者に通知する、請求項3記載の作業車両システム。
【請求項5】
前記制御装置は、前記推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合、前記端末装置により設定された目標完了時刻(TT)内に、前記作業車両が前記予定走行経路の到達地点に到達するように、遅れている時間の量に基づいて、前記作業車両の速度またはエンジン回転数の増加の量を演算し、それを作業者へ通知する、請求項3記載の作業車両システム。
【請求項6】
前記制御装置は、前記推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合、前記端末装置により設定された目標完了時刻(TT)内に、前記作業車両が前記予定走行経路の到達地点に到達するように、遅れている時間の量に基づいて、前記作業車両の速度またはエンジン回転数の増加の量を演算し、増加した量での自動速度制御または自動エンジン回転数制御を行う、請求項3記載の作業車両システム。
【請求項7】
前記制御装置は、前記推定された時刻(ET)が前記目標完了時刻(TT)よりも早い場合も、前記推定された時刻(ET)を作業者に通知する、請求項4記載の作業車両システム。
【請求項8】
前記目標完了時刻(TT)は、走行する日の走行場所での日没時刻を設定し、または、前記端末装置により設定される時刻からの所定の時間幅によって設定されることも可能である、請求項1から請求項7の何れかに記載の作業車両システム。
【請求項9】
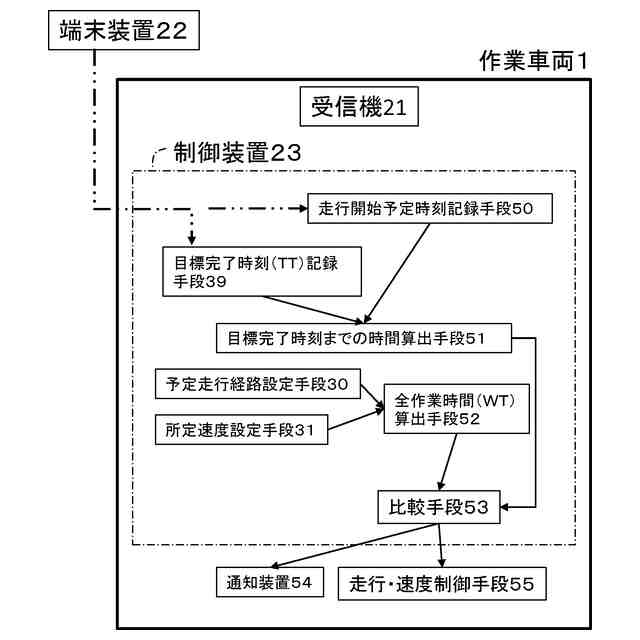
前記制御装置は、予め設定されている所定の走行速度と前記予定走行経路の長さ(TL)に基づき、全作業時間(WT)を演算し、前記作業車両の走行開始予定時刻から前記目標完了時刻(TT)までの時間が前記全作業時間(WT)よりも長い場合は、
前記制御装置は、前記目標完了時刻(TT)から前記全作業時間(WT)だけ前の時刻に走行を自動的に開始する、またはその旨を作業者に通知する、請求項8記載の作業車両システム。
【請求項10】
前記制御装置は、予め設定されている所定の走行速度と前記予定走行経路の長さ(TL)に基づき、全作業時間(WT)を演算し、前記作業車両の走行開始予定時刻から前記目標完了時刻(TT)までの時間が前記全作業時間(WT)よりも長い場合は、
前記制御装置は、前記目標完了時刻(TT)から前記全作業時間(WT)だけ前の時刻よりもさらに前の時刻に走行を開始することを作業者に通知する、請求項8記載の作業車両システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
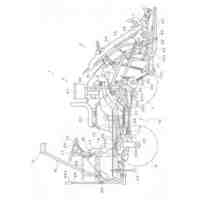
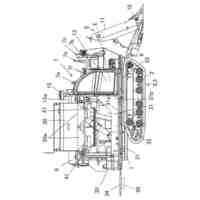
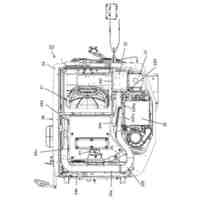
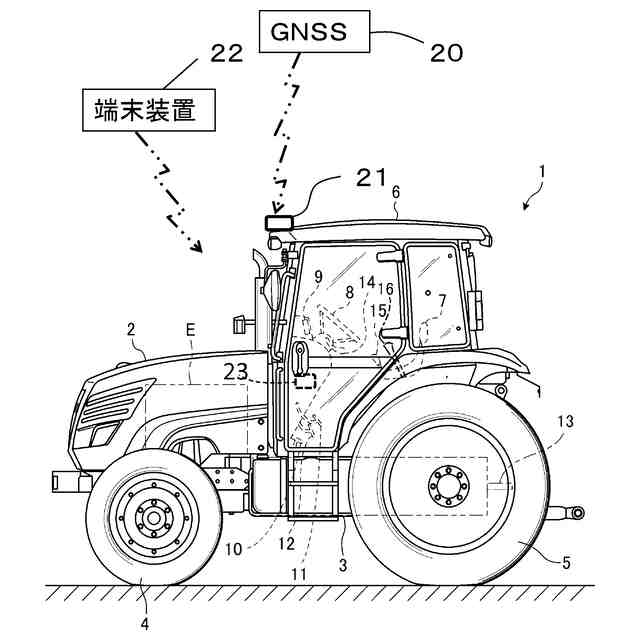
本発明は、耕運作業を行うトラクターなどの作業車両のシステムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、障害物センサを備え、障害物との接触を回避しつつ自動走行による作業を行う作業車両が公知である。たとえば、作業車両の周囲に存在する障害物を検出する障害物検知部と、障害物検出部による障害物検出を無効化する無効化指示を行う無効化指示手段と、障害物検知部による障害物の検知に基づく報知を行う報知部と、を備え、無効化指示が操作されると、報知部による報知を中断する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2019-147553号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、そのような作業車両では、自動運転中は、管理者は他の作業を行うことができるが、自動運転による作業がいつ終わるのか予測するためには作業効率と圃場面積等から推測したり計算したりする必要があり、面倒であった。特に、作業車両の自動走行を目視しない場合への対処が不十分であった。
【0005】
本発明では、そのような作業車両の課題を考慮し、作業がいつ完了するかについて面倒な手間が要らない作業車両システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、
測位装置を備え予定走行経路に沿って走行するように自動運転される作業車両のシステムであって、
前記作業車両を監視する端末装置と、
前記端末装置により設定された作業の目標完了時刻(TT)までに、前記作業車両が前記予定走行経路の到達地点に到達するように、作業者に各種通知する制御装置と、を備えたことを特徴とする、作業車両システムである。
【0007】
第2の本発明は、
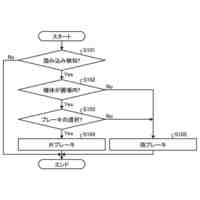
前記制御装置は、走行開始後の所定のタイミングで、前記作業車両の走行開始後からの経過時間である実走行経過時間(RT)および実際に走行した実走行距離(RL)を測定し、前記実走行経過時間(RT)および前記実走行距離(RL)に基づき、前記予定走行経路の到達地点に前記作業車両が到達する時刻(ET)を推定し、その推定された時刻(ET)を前記目標完了時刻(TT)と比較し、推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合は、作業者へ遅れていることを通知する、第1の本発明の作業車両システムである。
【0008】
第3の本発明は、
前記制御装置は、前記実走行経過時間(RT)および前記実走行距離(RL)に基づき、実際の実走行速度を算出し、前記予定走行経路の長さ(TL)と前記実走行距離(RL)に基づき、前記到達地点までの残る距離を算出し、前記実走行速度と前記残る距離に基づき、前記到達地点までの残る時間を算出し、前記所定のタイミングと前記残る時間に基づき、前記予定走行経路の到達地点に到達する時刻(ET)を推定する、第2の本発明の作業車両システムである。
【0009】
第4の本発明は、
前記制御装置は、前記推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合、前記推定された時刻(ET)を作業者に通知する、第3の本発明の作業車両システムである。
【0010】
第5の本発明は、
前記制御装置は、前記推定された時刻(ET)が前記目標完了時刻(TT)よりも遅れている場合、前記端末装置により設定された目標完了時刻(TT)内に、前記作業車両が前記予定走行経路の到達地点に到達するように、遅れている時間の量に基づいて、前記作業車両の速度またはエンジン回転数の増加の量を演算し、それを作業者へ通知する、第3の本発明の作業車両システムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
苗移植機
18日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
苗移植機
12日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
EGR装置
8日前
井関農機株式会社
収穫作業機
8日前
井関農機株式会社
収穫作業機
18日前
井関農機株式会社
圃場管理装置
13日前
井関農機株式会社
籾摺精米設備
14日前
井関農機株式会社
圃場管理装置
13日前
井関農機株式会社
圃場管理装置
5日前
井関農機株式会社
圃場管理装置
13日前
井関農機株式会社
籾摺精米設備
13日前
井関農機株式会社
苗移植作業機
5日前
井関農機株式会社
汎用コンバイン
5日前
井関農機株式会社
汎用コンバイン
5日前
井関農機株式会社
水田管理システム
5日前
井関農機株式会社
農業支援システム
13日前
井関農機株式会社
移植機
21日前
井関農機株式会社
洗米装置
7日前
井関農機株式会社
作業車両
今日
個人
枝切機
28日前
個人
苗キャップ
25日前
個人
尿処理材
13日前
個人
飼槽
1か月前
個人
ペット用フード容器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ