TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039133
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146004
出願日
2023-09-08
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20250313BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】位置取得装置を用いずに、自動走行を可能とすることができ作業車両を提供すること。
【解決手段】実施形態の一態様に係る作業車両は、ステアリング装置を制御することで、前記機体を自動直進させる直進アシストを実行可能な制御装置を備える。制御装置は、機体の左右方向の中央に設けられる第1距離センサから畦までの距離が最短距離となる第1地点から、前後方向に平行な方向において第2距離センサから機体の後方の畦となる第2地点まで第1距離と、第1地点から前後方向に平行な方向において第3距離センサから機体の後方の畦となる第3地点までの第2距離とが等しい状態で、機体の作業機が所定の降下位置となった場合に、直進走行の開始基準点を設定する。
【選択図】図6
特許請求の範囲
【請求項1】
機体の後方側に設けられ、前記機体の左右方向の中央に設けられ、かつ、前記機体の前後方向に直交する第1直交ライン上に設けられる第1距離センサと、
前記第1直交ライン上に設けられ、かつ、前記第1距離センサからの距離が第1所定距離となるように設けられる第2距離センサと、
前記第1直交ライン上に設けられ、前記第1距離センサからの距離が前記第1所定距離であり、かつ、前記第1距離センサに対して前記第2距離センサとは反対側となるように設けられる第3距離センサと、
前記機体の走行車輪の操舵量を調整するステアリング装置と、
前記ステアリング装置を制御することで、前記機体を自動直進させる直進アシストを実行可能な制御装置と
を備え、
前記第1距離センサは、前記第1距離センサから前記機体の後方の畦までの距離が最も短い第1地点までの最短距離を測定し、
前記第2距離センサは、前記前後方向に平行な方向において、前記第2距離センサから前記機体の後方の畦となる第2地点までの距離を測定し、
前記第3距離センサは、前記前後方向に平行な方向において、前記第3距離センサから前記機体の後方の畦となる第3地点までの距離を測定し、
前記制御装置は、
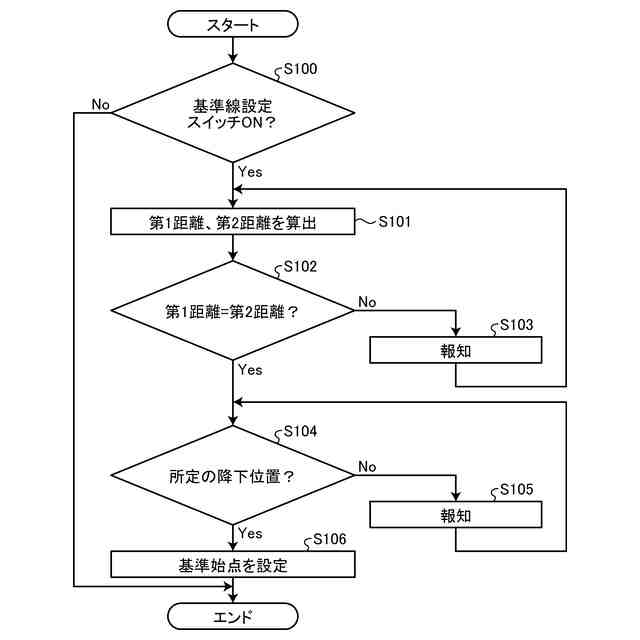
前記第1地点から前記第2地点までの第1距離、および、前記第1地点から前記第3地点までの第2距離を算出し、
前記第1距離と前記第2距離とが等しい状態で、前記機体の作業機が所定の降下位置となった場合に、直進走行の開始基準点を設定する、作業車両。
続きを表示(約 1,200 文字)
【請求項2】
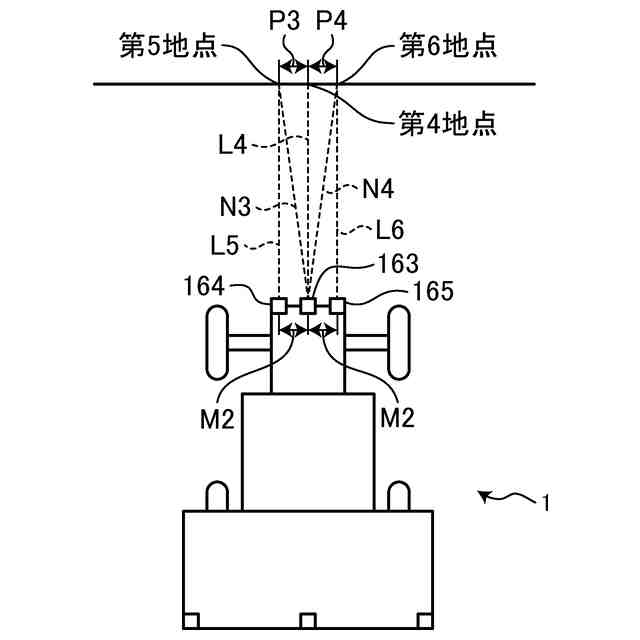
前記機体の前方側に設けられ、前記左右方向の中央に設けられ、かつ、前記機体の前後方向に直交する第2直交ライン上に設けられる第4距離センサと
前記第2直交ライン上に設けられ、かつ、前記第4距離センサからの距離が第2所定距離となるように設けられる第5距離センサと、
前記第2直交ライン上に設けられ、前記第5距離センサからの距離が前記第2所定距離であり、かつ、前記第5距離センサに対して前記第4距離センサとは反対側に設けられる第6距離センサと
を備え、
前記第4距離センサは、前記第4距離センサから前記機体の前方の畦までの距離が最も短い第4地点までの最短距離を測定し、
前記第5距離センサは、前記前後方向に平行な方向における前記第5距離センサから前記機体の前方の畦となる第5地点までの距離を測定し、
前記第6距離センサは、前記前後方向に平行な方向における前記第6距離センサから前記機体の前方の畦となる第6地点までの距離を測定し、
前記制御装置は、
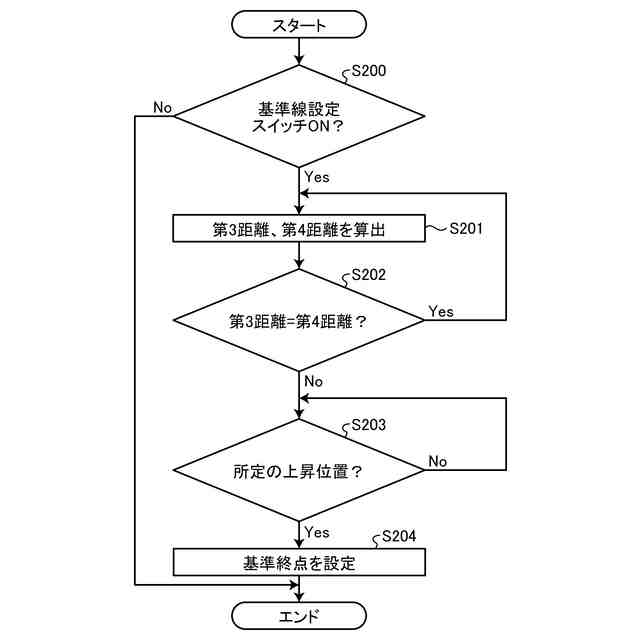
前記第4地点から前記第5地点までの第3距離、および、前記第4地点から前記第6地点までの第4距離を算出し、
前記第3距離と前記第4距離とが等しい状態から、前記第3距離と前記第4距離とが等しくない状態となり、かつ、前記作業機が所定の上昇位置となった場合に、直進走行の終了基準点を設定する、請求項1に記載の作業車両。
【請求項3】
前記自動直進のON、および、OFFの操作を受け付ける操作部
を備え、
前記制御装置は、
前記操作部がONとなっており、かつ、前記第1距離と前記第2距離とが等しい状態で、前記作業機が所定の降下位置となっている場合に、前記自動直進を開始し、
前記操作部がONとなっており、かつ、前記第1距離と前記第2距離とが等しくない状態、または、前記作業機が前記所定の降下位置ではない場合には、前記自動直進を開始しない、請求項1に記載の作業車両。
【請求項4】
機体に設けられ、測位手段から測位情報を受け取り、受け取った測位情報に基づいて前記機体の現在の位置情報を取得する位置取得装置と、
前記機体の走行車輪の操舵量を調整するステアリング装置と、
前記ステアリング装置を制御することで、前記機体を自動直進させる直進アシストを実行可能な制御装置と
を備え、
前記制御装置は、
所定距離毎に取得された前記位置情報に基づいて、前記機体の位置を点群データとしてマッピングし、
前記点群データにおいて、前記所定距離毎の前記機体の位置を最小二乗法によって直線近似し、
前記直線近似によって算出される直線の傾きの変化が所定変化範囲以内である場合に、前記直線近似によって算出される直線を、自動直進の直進ラインとして設定する、作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、位置取得装置によって測定された作業車両の位置が、作業走行経路の終端になると、自動走行を禁止することが知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6415810号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記する作業車両は、位置取得装置によって測定された位置情報に基づいて、自動走行が実行されるため、位置取得装置によって位置情報が取得できない場合には、自動走行を実行することができない。また、上記する作業車両は、位置取得装置が設けられていない作業車両では、自動走行を実行することができない。
【0005】
本発明は、上記に鑑みてなされたものであって、位置取得装置を用いずに、自動走行を可能とする作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両(1)は、機体の後方側に設けられ、機体の左右方向の中央に設けられ、かつ、機体の前後方向に直交する第1直交ライン上に設けられる第1距離センサ(160)と、第1直交ライン上に設けられ、かつ、第1距離センサ(160)からの距離が第1所定距離となるように設けられる第2距離センサ(161)と、第1直交ライン上に設けられ、第1距離センサ(160)からの距離が前記第1所定距離であり、かつ、第1距離センサ(160)に対して第2距離センサ(161)とは反対側となるように設けられる第3距離センサ(162)と、機体の走行車輪(10)の操舵量を調整するステアリング装置(35)と、ステアリング装置(35)を制御することで、機体を自動直進させる直進アシストを実行可能な制御装置(100)とを備える。第1距離センサ(160)は、第1距離センサ(160)から機体の後方の畦までの距離が最も短い第1地点までの最短距離を測定し、第2距離センサ(161)は、前後方向に平行な方向において、第2距離センサ(161)から機体の後方の畦となる第2地点までの距離を測定し、第3距離センサ(162)は、前後方向に平行な方向において、第3距離センサ(162)から機体の後方の畦となる第3地点までの距離を測定する。制御装置(100)は、第1地点から第2地点までの第1距離、および、第1地点から第3地点までの第2距離を算出し、第1距離と前記第2距離とが等しい状態で、機体の作業機(4)が所定の降下位置となった場合に、直進走行の開始基準点を設定する。
【発明の効果】
【0007】
実施形態の一態様によれば、位置取得装置を用いずに、自動走行を可能とすることができる。
【図面の簡単な説明】
【0008】
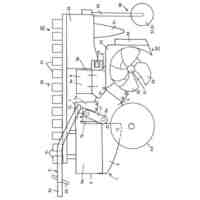
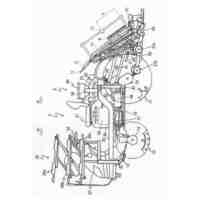
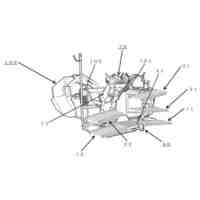
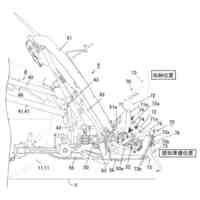
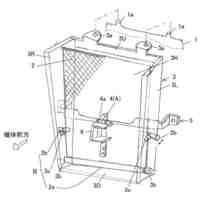
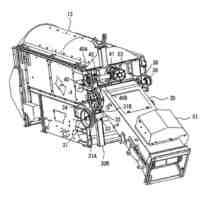
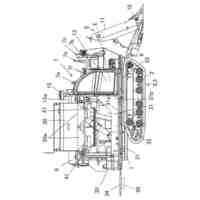
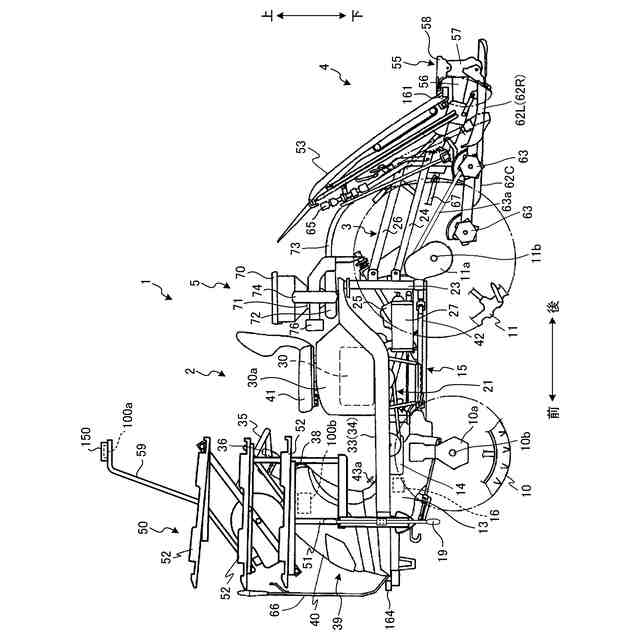
図1は、作業車両を示す側面図である。
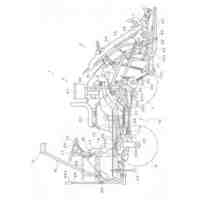
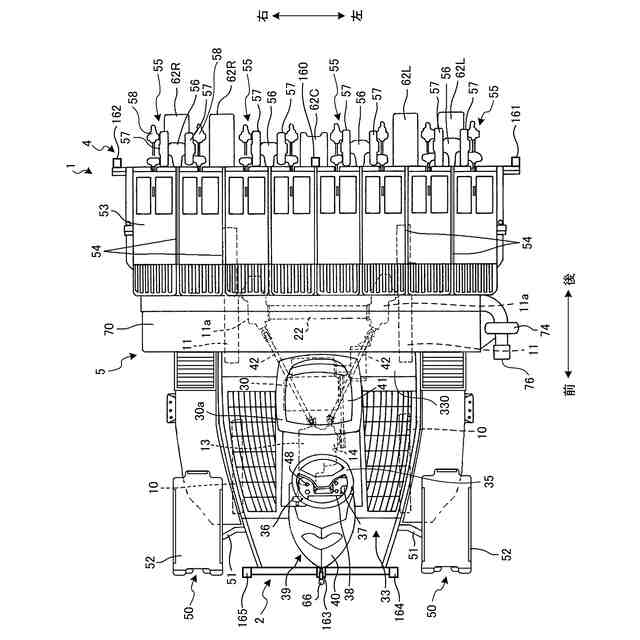
図2は、作業車両を示す平面図である。
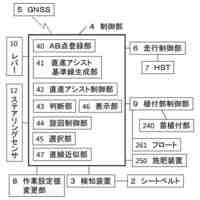
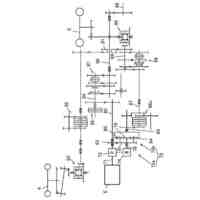
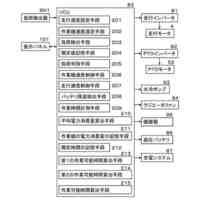
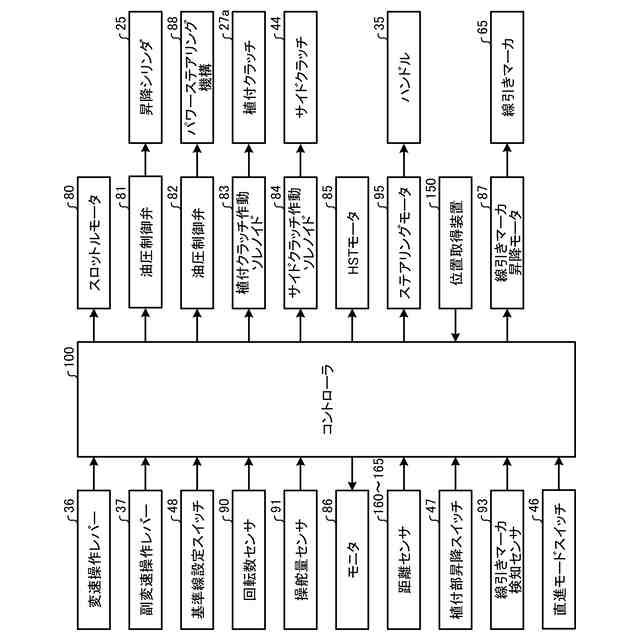
図3は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
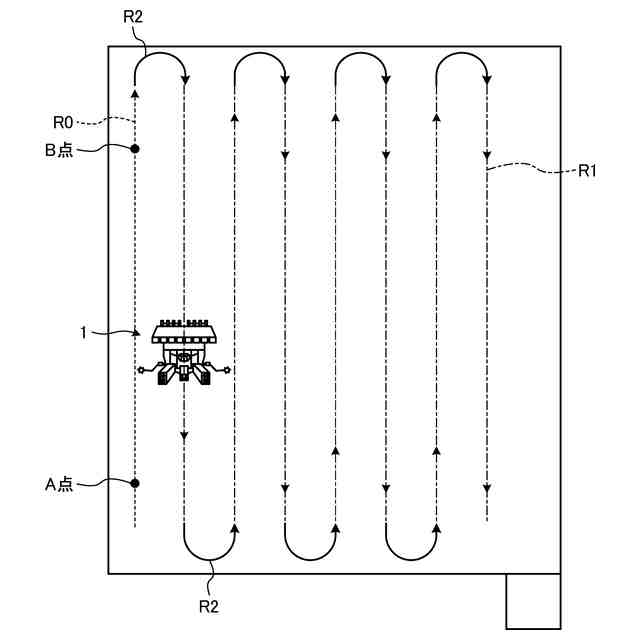
図4は、苗移植機の圃場における自律走行の説明図である。
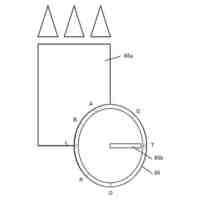
図5は、基準始点(A点)の設定方法を示す図である。
図6は、苗移植機が、畦に対して直交する方向を向いていない状態を示す図である。
図7は、基準終点(B点)の設定方法を示す図である。
図8は、実施形態に係る基準始点設定処理を説明するフローチャートである。
図9は、実施形態に係る基準終点設定処理を説明するフローチャートである。
図10は、点群データのマッピングの一例を示す図である。
図11は、歩行型の苗移植機の側面図である。
図12は、中割を行ったラインに沿った後進を説明する図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両の概要>
まず、図1および図2を参照して実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1か月前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
精米設備
13日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
育苗培地
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
25日前
井関農機株式会社
苗移植機
3日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
20日前
井関農機株式会社
ラジエータ
24日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
25日前
井関農機株式会社
収穫作業機
9日前
井関農機株式会社
籾摺精米設備
4日前
井関農機株式会社
圃場管理装置
4日前
井関農機株式会社
収穫作業車両
1か月前
井関農機株式会社
圃場管理装置
4日前
井関農機株式会社
圃場管理装置
4日前
井関農機株式会社
乗用型苗植機
1か月前
井関農機株式会社
籾摺精米設備
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ