TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025047622
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023156216
出願日
2023-09-21
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20250326BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場に合った自動走行を実行する作業車両を提供すること。
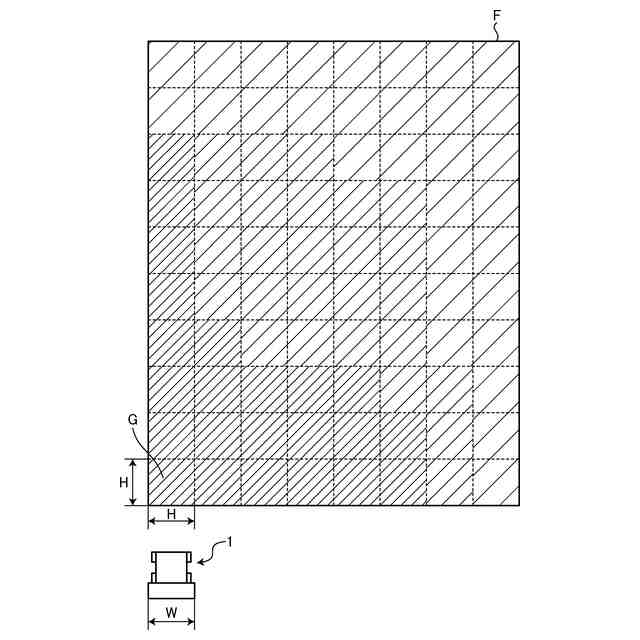
【解決手段】実施形態の一態様に係る作業車両は、圃場に作業を行う。作業車両は、走行車体と、衛星から衛星信号を受信するアンテナと、衛星信号に基づいて走行車体の位置を検出する衛星測位装置と、走行車体の位置と、圃場をメッシュ状に区切った区画に作業指示値が紐付けられた作業計画マップとに基づいて、作業指示値に応じた作業を実行させる制御装置とを備える。区画は、作業車両の機体情報に応じて設定される。
【選択図】図3
特許請求の範囲
【請求項1】
圃場に作業を行う作業車両であって、
走行車体と、
衛星から衛星信号を受信するアンテナと、
前記衛星信号に基づいて前記走行車体の位置を検出する衛星測位装置と、
前記走行車体の位置と、圃場をメッシュ状に区切った区画に作業指示値が紐付けられた作業計画マップとに基づいて、前記作業指示値に応じた作業を実行させる制御装置と
を備え、
前記区画は、前記作業車両の機体情報に応じて設定される、作業車両。
続きを表示(約 1,100 文字)
【請求項2】
前記区画の幅は、前記作業車両の幅に等しい、請求項1に記載の作業車両。
【請求項3】
前記区画が設けられる範囲は、圃場におけるティーチング作業が行われることで、設定される、請求項1に記載の作業車両。
【請求項4】
前記制御装置は、前記走行車体の旋回動作が行われた前記区画を記憶部に記憶させる、請求項1に記載の作業車両。
【請求項5】
圃場の深さを検出する深度センサ
を備え、
前記制御装置は、
圃場の深さの平均値を前記区画毎に算出し、
算出した前記区画毎における圃場の深さの平均値に基づいて、圃場全体の深さの平均値を更新する、請求項1に記載の作業車両。
【請求項6】
前記走行車体に設けられた苗植付部と、
前記走行車体に設けられたハンドルと、
前記走行車体の前進、および、後進を切り替え可能な変速操作レバーと
を備え、
前記制御装置は、
前記苗植付部の昇降回数、前記ハンドルの操作回数、および、後進への切り替え回数に応じて、圃場の荒れ具合に対する重み付けを行う、請求項1に記載の作業車両。
【請求項7】
前記制御装置は、
前記走行車体が、前記走行車体の進行方向に沿った前記区画の境界を跨いで走行している場合、前記走行車体の幅方向における2つの区画に対する前記作業車両の占有割合に応じた作業指示値を算出し、
算出した前記作業指示値に応じた作業を実行させる、請求項1に記載の作業車両。
【請求項8】
前記制御装置は、
前記走行車体が、前記走行車体の進行方向に沿った前記区画の境界を跨いで自動走行している場合、自動走行における走行経路と、実際の走行経路との横ずれ量を算出し、
算出した前記横ずれ量の平均値を前記区画毎に記憶させる、請求項1に記載の作業車両。
【請求項9】
前記走行車体の角速度を検出する角速度検出装置
を備え、
前記制御装置は、
前記走行車体が、自動走行している場合、前記角速度の平均値を前記区画毎に記憶させる、請求項1に記載の作業車両。
【請求項10】
前記制御装置は、
前記走行車体が、前記走行車体の進行方向に沿った前記区画の境界を跨いで走行している場合、予め設定された走行経路と、実際の走行経路との横ずれ量を算出し、
前記横ずれ量が大きくなるほど大きくなる走破難易度スコアを算出し、
前記走破難易度スコアが所定値以上となる区画が所定数以上連続する場合、所定数以上連続する区画の延長上の区画を悪路として設定する、請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、圃場に対する作業マップを用いて、圃場に作業を行う作業車両が知られている(例えば、特許文献1参照)。作業マップは、圃場をメッシュ状に区切って作成される。
【先行技術文献】
【特許文献】
【0003】
特開2020-162439号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記する作業マップは、作業車両の機体情報に対応して作成された作業マップではないため、圃場で作業を行う際の作業機の作業について、改善の余地がある。
【0005】
本発明は、上記に鑑みてなされたものであって、圃場における作業性を向上させた作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両(1)は、圃場に作業を行う。作業車両(1)は、走行車体(2)と、衛星から衛星信号を受信するアンテナ(151)と、衛星信号に基づいて走行車体(2)の位置を検出する衛星測位装置(150)と、走行車体(2)の位置と、圃場をメッシュ状に区切った区画に作業指示値が紐付けられた作業計画マップとに基づいて、作業指示値に応じた作業を実行させる制御装置(100)とを備える。区画は、作業車両(1)の機体情報に応じて設定される。
【発明の効果】
【0007】
実施形態の一態様によれば、作業車両は、圃場における作業性を向上させることができる。
【図面の簡単な説明】
【0008】
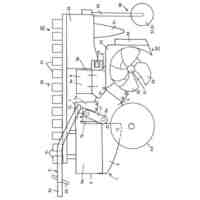
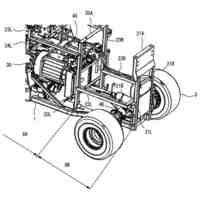
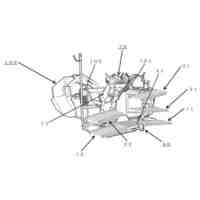
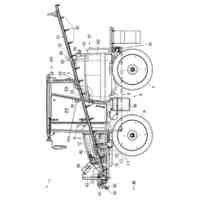
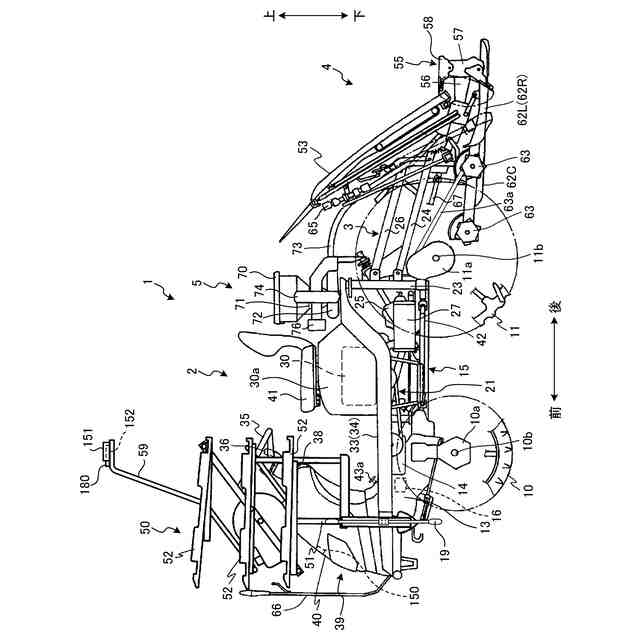
図1は、作業車両を示す側面図である。
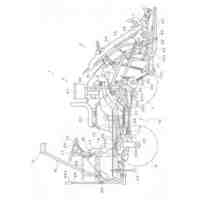
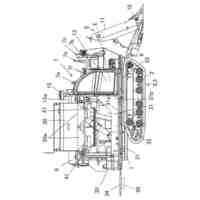
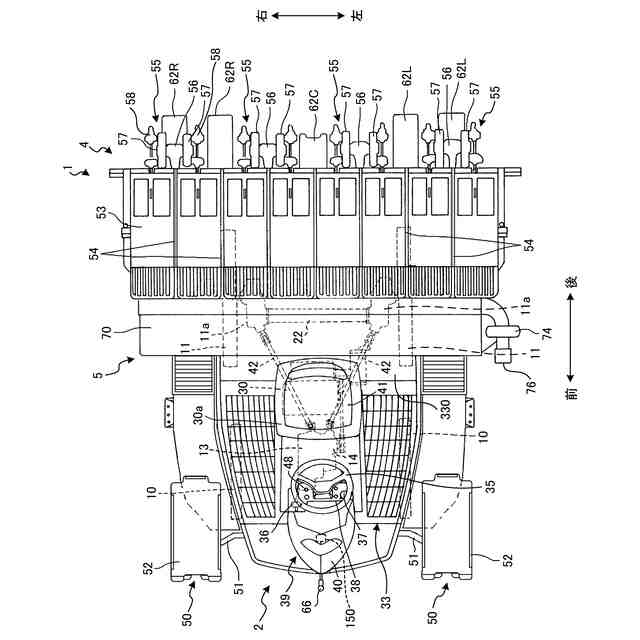
図2は、作業車両を示す平面図である。
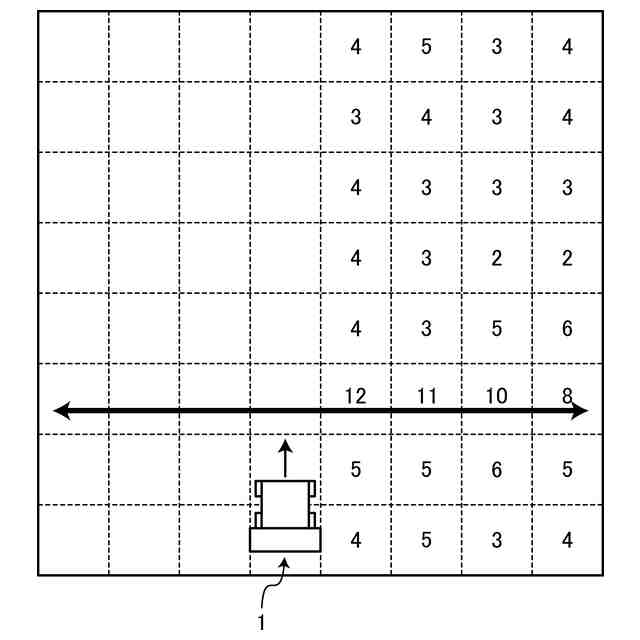
図3は、メッシュ状に区切られた圃場と、苗移植機との関係を示す図である。
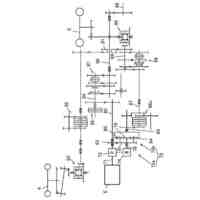
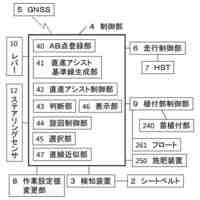
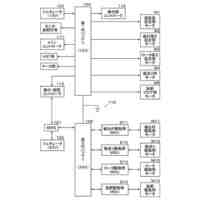
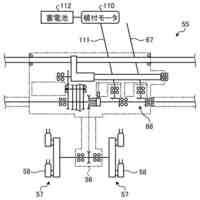
図4は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
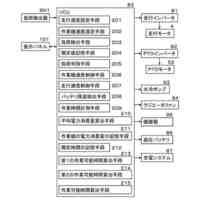
図5は、コントローラの概略ブロック図である。
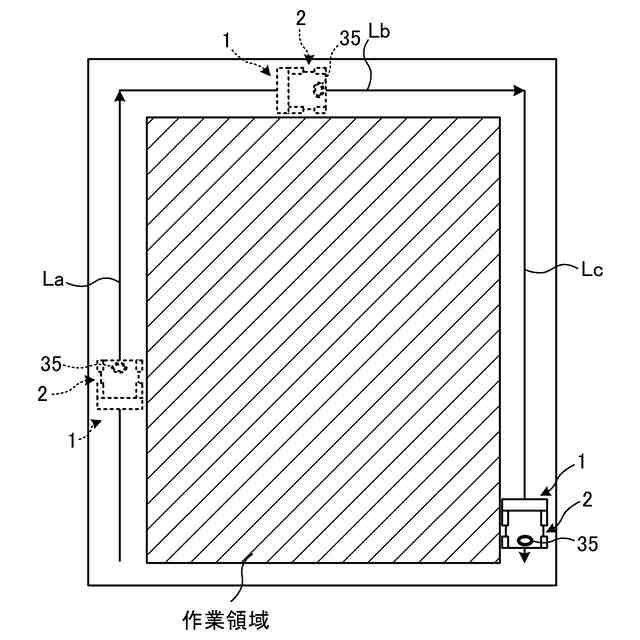
図6は、実施形態に係るティーチング走行による作業領域の設定方法を示す図である。
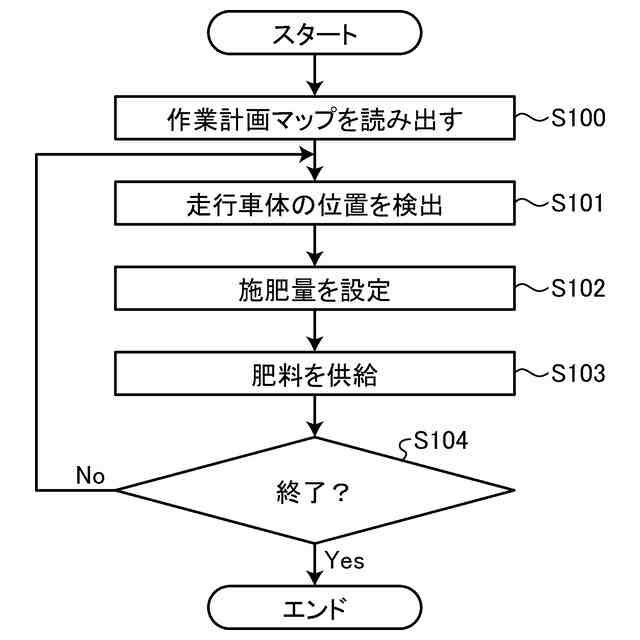
図7は、実施形態に係る施肥供給処理を説明するフローチャートである。
図8は、悪路が設定される一例を示す図である(その1)。
図9は、悪路が設定される一例を示す図である(その2)。
図10は、悪路設定が解除された状態を示す図である。
図11は、モニタの表示例を示す図である(その1)。
図12は、モニタの表示例を示す図である(その2)。
図13は、モニタの表示例を示す図である(その3)。
図14は、モニタの表示例を示す図である(その4)。
図15は、モニタの表示例を示す図である(その5)。
図16は、モニタの表示例を示す図である(その6)。
図17は、モニタの表示例を示す図である(その7)。
【発明を実施するための形態】
【0009】
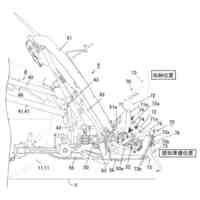
まず、図1および図2を参照して実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
【0010】
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、操縦席41からハンドル35に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1か月前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
3日前
井関農機株式会社
育苗培地
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
苗移植機
25日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
精米設備
13日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
収穫作業機
9日前
井関農機株式会社
薬剤散布機
2か月前
井関農機株式会社
耕耘作業機
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ