TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012488
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115354
出願日
2023-07-13
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20250117BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両に連結する作業機状況を撮像し適切な旋回操作を実現する作業車両を提供することを目的とする。
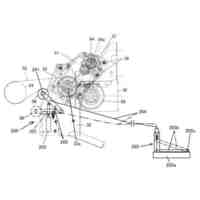
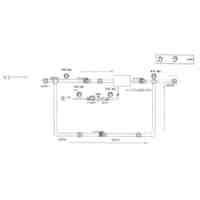
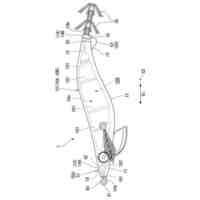
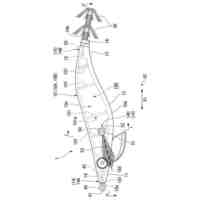
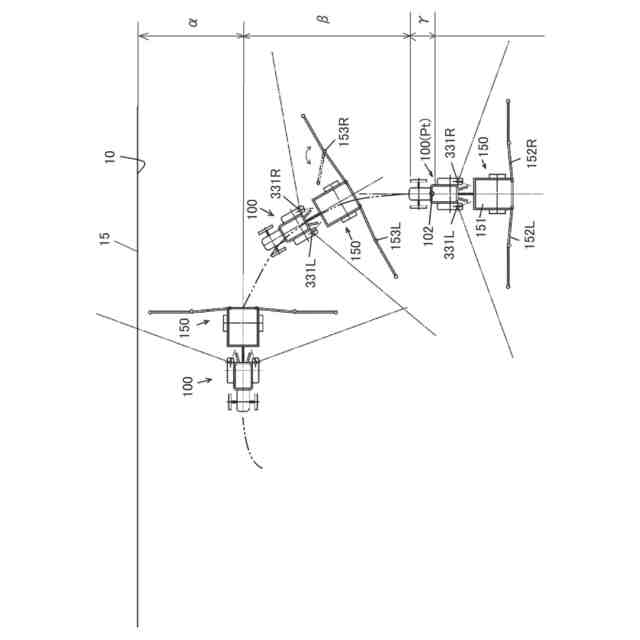
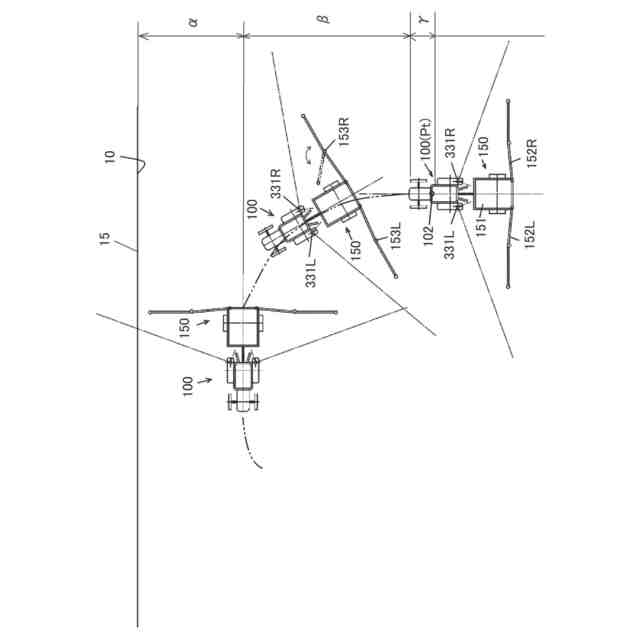
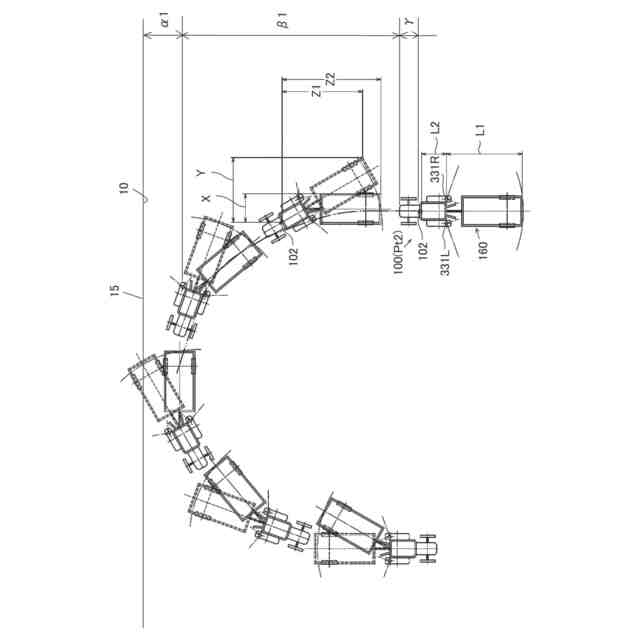
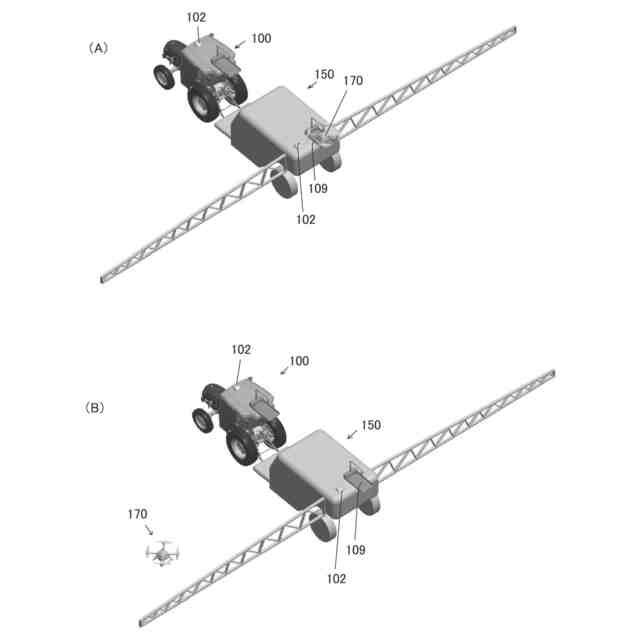
【解決手段】作業走行経路と旋回走行経路を登録したマップ上をGNSS受信装置102による位置情報に沿って移動する作業車両において、装着された作業機150を撮像する撮像装置を設け、撮像装置は、少なくとも前記作業機150の両端位置を共に撮像視野に入るように撮影可能に設け、前記撮像装置の撮像データに基づいて車体の旋回位置Ptを演算設定する旋回位置演算制御部を設ける。そして、旋回位置演算制御部は、撮像装置による撮像データより作業機150のマップ上の位置関係を演算し、旋回走行経路内で作業機150が移動する旋回位置Ptを設定するよう構成する。
【選択図】図5
特許請求の範囲
【請求項1】
作業走行経路と旋回走行経路を登録したマップ上をGNSS受信装置(102)による位置情報に沿って移動する作業車両において、装着された作業機(140,150)を撮像する撮像装置(331)を設け、撮像装置(331)は、少なくとも前記作業機(140,150)の両端位置を共に撮像視野に入るように撮影可能に設け、前記撮像装置の撮像データに基づいて車体の旋回位置(Pt,Pt2)を演算設定する旋回位置演算制御部(330)を設けたことを特徴とする作業車両。
続きを表示(約 230 文字)
【請求項2】
旋回位置演算制御部(330)は、撮像装置(331)による撮像データより作業機(140,150)のマップ上の位置関係を演算し、旋回走行経路内で作業機(150)が移動する旋回位置(Pt,Pt2)を設定するよう構成した請求項1に記載の作業車両。
【請求項3】
構成一部を折畳み可能に構成する作業機(140,150)において、撮像装置(331)はこの折畳み時の端点を撮像可能に設けた請求項1又は請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農用トラクタなどの作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
作業車両が自動直線経路の終端に達した際に、一旦停止した後、そのまま前進して隣接の直線経路に進入するか、停止後一旦後退して隣接の作業経路に進入するか等の所定の旋回動作を選択できる構成がある(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-36211号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1によれば、作業者は、作業機の種類や寸法などに基づいて、作業車両の最適な旋回方法を設定することができる。また、作業機種類や寸法に見合う旋回位置を設定する方法に改良できる。
【0005】
しかしながら、現実には作業中において作業機に負荷がかかりスリップが発生する等あって作業車両の旋回状況は同じ作業機種類や寸法といえども異なることがある。
【0006】
本発明は、作業車両に連結する作業機状況を撮像し適切な旋回操作を実現することを目的とする。
【課題を解決するための手段】
【0007】
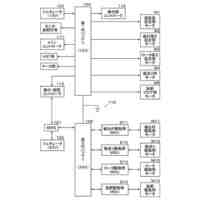
上記課題を解決し目的を達成するために、請求項1に記載の発明は、作業走行経路と旋回走行経路を登録したマップ上をGNSS受信装置102による位置情報に沿って移動する作業車両において、装着された作業機140,150を撮像する撮像装置331を設け、撮像装置331は、少なくとも前記作業機140,150の両端位置を共に撮像視野に入るように撮影可能に設け、前記撮像装置の撮像データに基づいて車体の旋回位置Pt,Pt2を演算設定する旋回位置演算制御部330を設ける。
【0008】
請求項2に記載の発明は、請求項1に記載の発明において、旋回位置演算制御部330は、撮像装置331による撮像データより作業機140,150のマップ上の位置関係を演算し、旋回走行経路内で作業機150が移動する旋回位置Pt,Pt2を設定するよう構成する。
【0009】
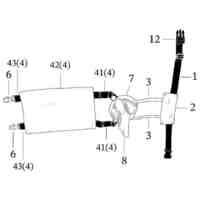
請求項3に記載の発明は、請求項1又は請求項2に記載の発明において、構成一部を折畳み可能に構成する作業機140,150において、撮像装置331はこの折畳み時の端点を撮像可能に設ける。
【発明の効果】
【0010】
請求項1及び請求項2に記載の発明によれば、予め作業走行経路と旋回走行経路をマップに登録し、作業車両100と作業機150の距離関係とGNSS受信装置102による位置情報と撮像装置331の撮像データより、マップ上を移動する特に作業機150の位置関係を演算し、旋回走行経路内で作業機150が適正に移動するように作業車両100の旋回位置Ptを決定する構成であるから、様々な作業機種類や大きさに対応して旋回走行させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
昆虫捕獲器
24日前
個人
トラップタワー
23日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
収穫作業機
29日前
個人
プランターシーブ
1か月前
株式会社猫壱
首輪
15日前
有限会社小林工業
エビ養殖設備
16日前
個人
ペット用デンタルおもちゃ
23日前
井関農機株式会社
作業車両
15日前
個人
ペット用排泄物収納袋取付具
1か月前
井関農機株式会社
作業車両
22日前
株式会社ダイイチ
海苔網の酸処理船
7日前
トヨタ自動車株式会社
飛行体
1か月前
平岡織染株式会社
防虫間仕切りシート
14日前
池田食研株式会社
腹足類の駆除忌避剤
7日前
松山株式会社
草刈作業機
7日前
平岡織染株式会社
防虫間仕切りシート
22日前
株式会社サタケ
穀物タンクの換気装置
8日前
ニシム電子工業株式会社
散布装置
7日前
東都興業株式会社
シート開閉装置
25日前
株式会社ササキコーポレーション
農作業機
7日前
株式会社ササキコーポレーション
農作業機
7日前
井関農機株式会社
収穫作業機
29日前
株式会社ササキコーポレーション
農作業機
7日前
株式会社 ジークラック
ルアー
9日前
第一ビニール株式会社
栽培容器載置台
22日前
第一ビニール株式会社
植物の茎保持具
22日前
ポンポリース株式会社
動物用歩行補助具
23日前
株式会社クボタ
水田作業機
今日
株式会社クボタ
水田作業機
今日
株式会社クボタ
歩行型作業機
7日前
IWKイノベーション株式会社
止まり木ステップ
15日前
株式会社シマノ
ルアー
15日前
株式会社シマノ
ルアー
15日前
個人
防虫袋体及び苗の植え付け方法
9日前
株式会社アテックス
草刈機の弾性カバー保持機構
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ