TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024169973
公報種別
公開特許公報(A)
公開日
2024-12-06
出願番号
2023086865
出願日
2023-05-26
発明の名称
営農管理システム
出願人
井関農機株式会社
代理人
主分類
A01C
15/00 20060101AFI20241129BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来の技術では、施肥マップや圃場座標や圃場情報の認識や登録を容易に行えなかった。
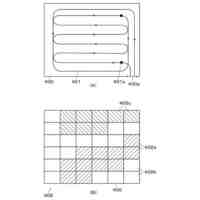
【解決手段】作業指示値に応じて作業地を作業走行する作業機であって、衛星からの衛星信号を受信する衛星アンテナと、前記衛星信号に基づいて自車位置に対応する測位データを出力する衛星測位モジュールと、前記作業地に対応付けられてメッシュ状に区切られた区画毎に前記作業指示値が入力される作業計画マップを保存する記憶部を備え、前記区画に作業を行うべき作業指示値が入力されている箇所から圃場の形状を認識し、認識した圃場形状の頂点座標を認識した圃場座標として登録されることを特徴とする営農管理システム。
【選択図】図3
特許請求の範囲
【請求項1】
作業指示値に応じて作業地を作業走行する作業機であって、
衛星からの衛星信号を受信する衛星アンテナと、
前記衛星信号に基づいて自車位置に対応する測位データを出力する衛星測位モジュールと、
前記作業地に対応付けられてメッシュ状に区切られた区画毎に前記作業指示値が入力される作業計画マップを保存する記憶部を備え、
前記区画に作業を行うべき作業指示値が入力されている箇所から圃場の形状を認識し、
認識した圃場形状の頂点座標を認識した圃場座標として登録されることを特徴とする
営農管理システム。
続きを表示(約 210 文字)
【請求項2】
前記圃場の座標は、圃場情報として記録され、
記録されるタイミングは圃場形状が確定したときであることを特徴とする請求項1に記載の営農管理システム。
【請求項3】
圃場形状の頂点の数と頂点座標を認識し、圃場座標として登録される際に、圃場形状の頂点の数と頂点座標の数が異なる場合は、前記頂点の数と前記頂点座標を要求する信号を送信する請求項1または2に記載の営農管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、営農管理システムであって例えば、供給量などを変更できる可変施肥田植機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
生育の良い場所等が正確に分かり、基肥する施肥量が分かる施肥マップを作成する施肥マップ作成システムが公知である(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2017-184640号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、そのような従来の技術では、施肥マップや作業実績の確認が容易に行えなかった。
【0005】
本発明では、施肥マップや作業実績の認識や登録が容易に出来る営農管理システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、
作業指示値に応じて作業地を作業走行する作業機であって、衛星からの衛星信号を受信する衛星アンテナと、前記衛星信号に基づいて自車位置に対応する測位データを出力する衛星測位モジュールと、前記作業地に対応付けられてメッシュ状に区切られた区画毎に前記作業指示値が入力される作業計画マップを保存する記憶部を備え、前記区画に作業を行うべき作業指示値が入力されている箇所から圃場の形状を認識し、認識した圃場形状の頂点座標を認識した圃場座標として登録されることを特徴とする営農管理システムである。
【0007】
第2の本発明は、
前記圃場の座標は、圃場情報として記録され、記録されるタイミングは圃場形状が確定したときであることを特徴とする請求項1に記載の営農管理システムである。
【0008】
第3の本発明は、
圃場形状の頂点の数と頂点座標を認識し、圃場座標として登録される際に、圃場形状の頂点の数と頂点座標の数が異なる場合は、前記頂点の数と前記頂点座標を要求する信号を送信する請求項1または2に記載の営農管理システムである。
【発明の効果】
【0009】
本発明によれば、圃場座標や圃場情報の登録を容易に行うことができる。
【図面の簡単な説明】
【0010】
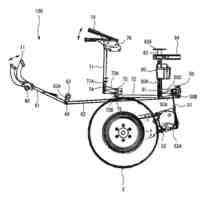
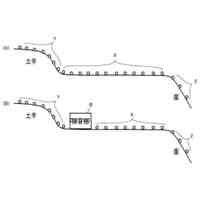
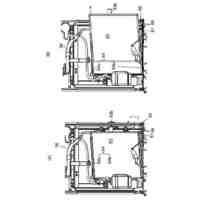
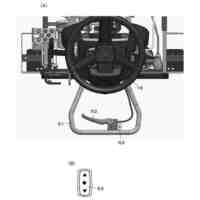
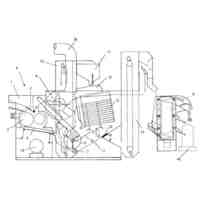
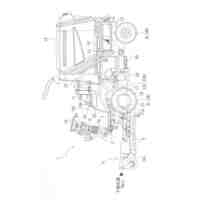
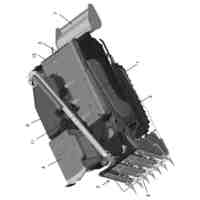
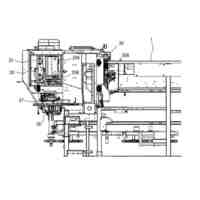
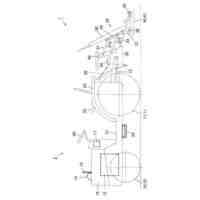
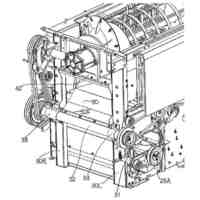
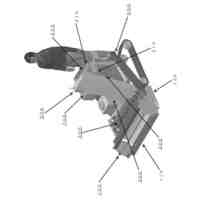
本発明における実施の形態にかかる可変施肥田植機の斜視図
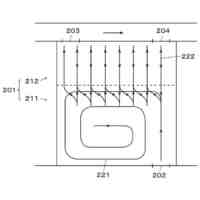
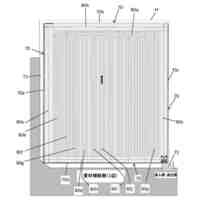
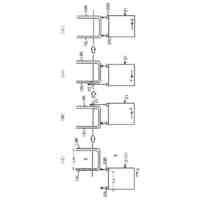
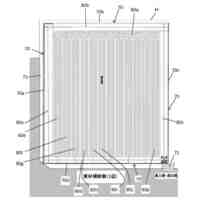
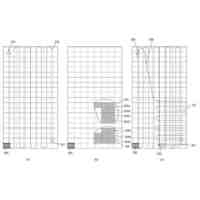
同上実施の形態におけるモバイル端末の管理画面(施肥マップ読み込み)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
同上実施の形態におけるモバイル端末の管理画面(可変施肥設定)
同上実施の形態におけるモバイル端末の管理画面(可変施肥設定)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業)
同上実施の形態におけるモバイル端末の管理画面(作業実績の作成)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業実績)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業実績)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業実績)
同上実施の形態におけるモバイル端末の管理画面(可変施肥作業実績)
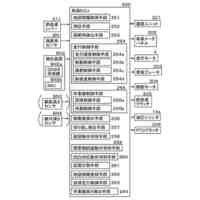
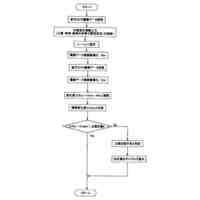
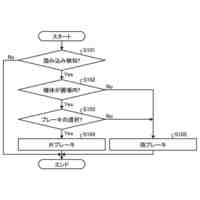
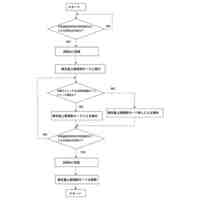
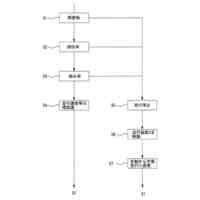
同上実施の形態におけるソフトウェアの読み込みフローチャート
同上実施の形態におけるロボット田植機に使うリモコンの画面(その1)
同上実施の形態におけるロボット田植機に使うリモコンの画面(その2)
同上実施の形態におけるロボット田植機に使うリモコンの画面(その3)
同上実施の形態におけるロボット田植機に使うリモコンの画面(その4)
同上実施の形態におけるモバイル端末の管理画面(施肥マップ確認)
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
11日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
苗移植機
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
調製設備
5日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
精米設備
今日
井関農機株式会社
コンバイン
7日前
井関農機株式会社
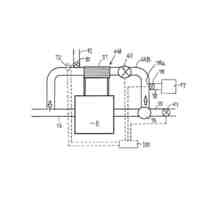
EGR装置
21日前
井関農機株式会社
籾摺選別機
5日前
井関農機株式会社
乗用草刈機
4日前
井関農機株式会社
乗用草刈機
4日前
井関農機株式会社
コンバイン
今日
井関農機株式会社
コンバイン
19日前
井関農機株式会社
圃場作業機
今日
井関農機株式会社
コンバイン
4日前
井関農機株式会社
苗移植作業機
18日前
井関農機株式会社
圃場管理装置
18日前
井関農機株式会社
乗用型田植機
今日
井関農機株式会社
圃場管理装置
12日前
井関農機株式会社
汎用コンバイン
18日前
井関農機株式会社
汎用コンバイン
18日前
井関農機株式会社
栗収穫作業車両
6日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ