TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024108376
公報種別
公開特許公報(A)
公開日
2024-08-13
出願番号
2023012705
出願日
2023-01-31
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01C
15/00 20060101AFI20240805BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 施肥マップ利用による施肥量のコントロールの精度を向上できる作業車両を提供する。
【解決手段】
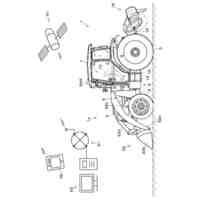
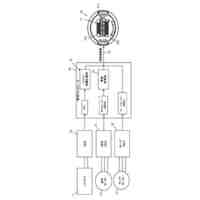
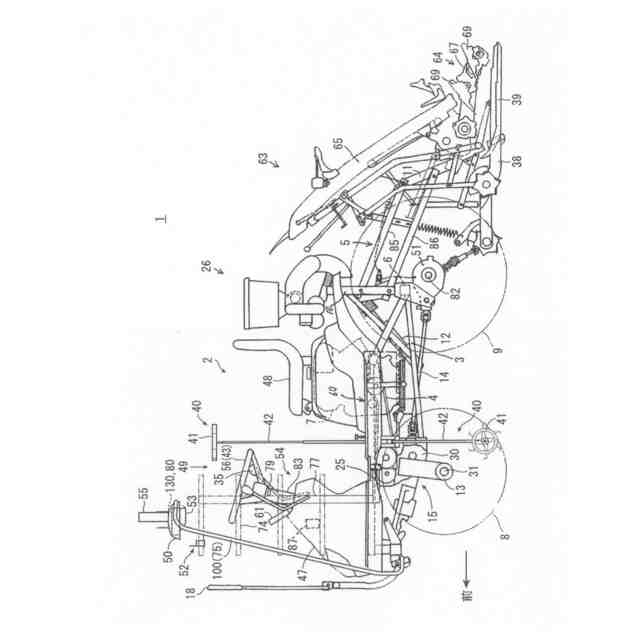
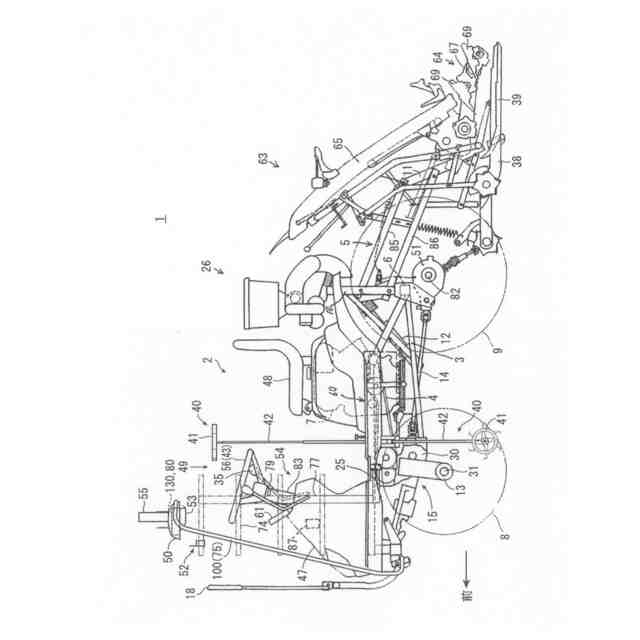
施肥装置26と、自機位置を取得する測位装置130とを備え、前記測位装置130により取得した自機位置に基づき、特定の地点ごとに施肥量が設定された施肥マップDhを利用して前記施肥装置26の施肥量をコントロールするよう構成された作業車両1であって、
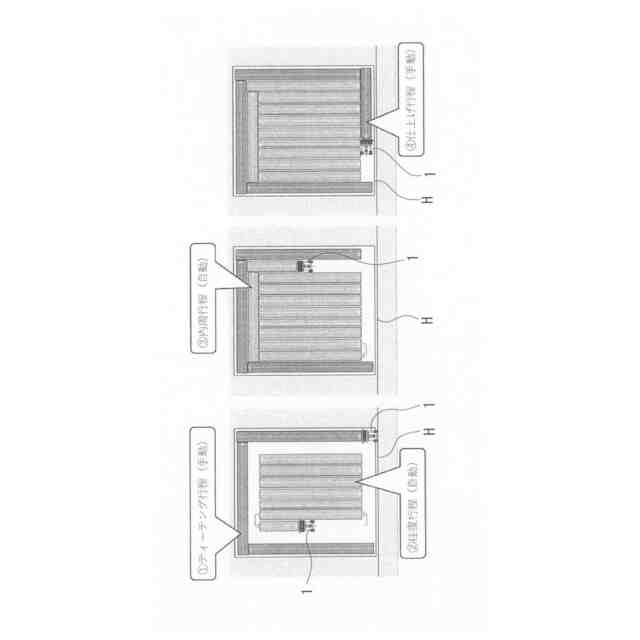
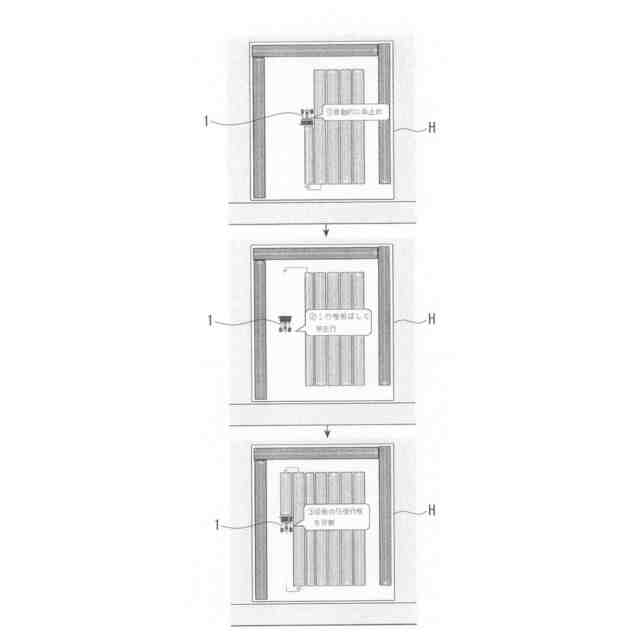
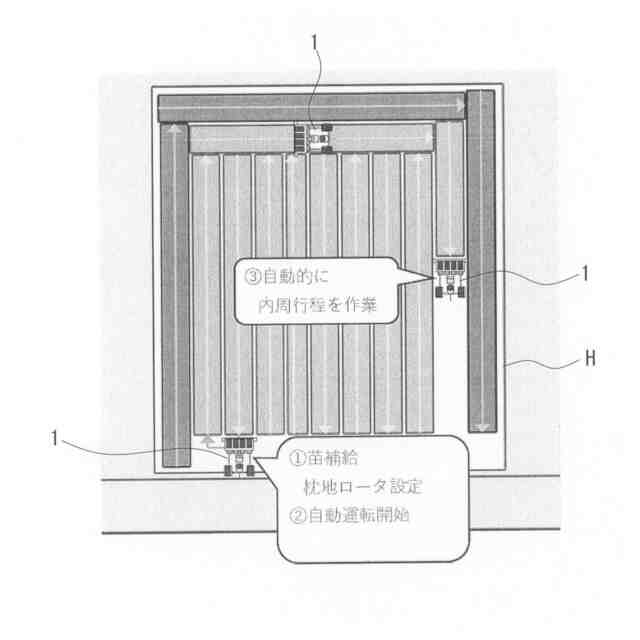
前記作業車両1は、位置情報を取得しながら圃場Hの外周を走行することにより、圃場の形状及び位置情報を含むティーチング圃場マップDqを作成し、
前記ティーチング圃場マップDqを用いて前記施肥マップDhに記録された前記特定の地点の位置情報を修正するように構成されたことを特徴とする作業車両1の提供により、上記課題が解決される。
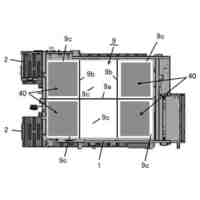
【選択図】 図1
特許請求の範囲
【請求項1】
施肥装置と、自機位置を取得する測位装置とを備え、前記測位装置により取得した自機位置に基づき、特定の地点ごとに施肥量が設定された施肥マップを利用して前記施肥装置の施肥量をコントロールするよう構成された作業車両であって、
前記作業車両は、位置情報を取得しながら圃場の外周を走行することにより、圃場の形状及び位置情報を含むティーチング圃場マップを作成し、
前記ティーチング圃場マップを用いて前記施肥マップに記録された前記特定の地点の位置情報を修正するように構成されたことを特徴とする作業車両。
続きを表示(約 670 文字)
【請求項2】
前記作業車両は、前記ティーチング圃場マップを、圃場の外周の走行によって取得した位置情報から作成された圃場外形の情報を含むように作成し、また、前記施肥マップから作業者の所定操作により作成された圃場外形の位置情報を含む施肥計画マップを作成し、前記施肥計画マップに設定された設定施肥量に基づき、前記施肥装置の施肥量をコントロールするよう構成され、さらに、
前記施肥計画マップの圃場外形の位置情報と、前記ティーチング圃場マップの圃場外形の位置情報を比較して、前記特定の地点の位置情報を修正するように構成されたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記圃場外形の少なくとも1つの隅角部の位置情報を比較することによって、前記隅角部同士の位置の差異が最小となるように、前記特定の地点の位置情報を修正することを特徴とする請求項2に記載の作業車両。
【請求項4】
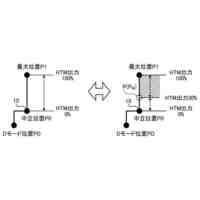
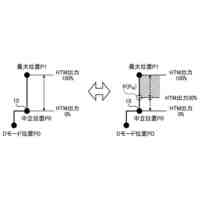
位置情報に基づき、前記施肥計画マップから取得した設定施肥量が、所定の施肥上下限値を越えているときは、前記設定施肥量が前記施肥上下限値内に納まるように、補正することを特徴とする請求項2または請求項3に記載の作業車両。
【請求項5】
位置情報に基づき、前記施肥計画マップから取得した設定施肥量が、所定の施肥上下限値を越えているときは、肥沃度センサから取得した肥沃度に関する情報に基づき施肥量をコントロールするリアルタイム可変施肥モードに切り替えることを特徴とする請求項2または請求項3に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場に苗を植え付ける作業車両に関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、測位装置により、自機の位置情報を取得し、取得した位置情報に基づき、圃場の地点ごとに設定施肥量が記録された施肥マップを参照して施肥量をコントロールする作業車両が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-101667号公報
特開2019-187377号公報
特開2019-41729号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の作業車両は、測位装置により取得される自機位置と施肥マップから設定施肥量を取得する地点に誤差が生じ、施肥量のコントロールの精度が低下するおそれがあった。
【0005】
そこで、本発明は、このような問題を解消し、施肥マップ利用による施肥量のコントロールの精度を向上できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、第1の発明は、
施肥装置と、自機位置を取得する測位装置とを備え、前記測位装置により取得した自機位置に基づき、特定の地点ごとに施肥量が設定された施肥マップを利用して前記施肥装置の施肥量をコントロールするよう構成された作業車両であって、
前記作業車両は、位置情報を取得しながら圃場の外周を走行することにより、圃場の形状及び位置情報を含むティーチング圃場マップを作成し、
前記ティーチング圃場マップを用いて前記施肥マップに記録された前記特定の地点の位置情報を修正するように構成されたことを特徴とする作業車両を提供する。
【0007】
上記第1の発明によれば、施肥マップ利用による施肥量のコントロールの精度を向上できる。加えて、作業者が手動で自機位置を修正する手間が省かれる。
【0008】
第2の発明は、上記第1の発明の構成に加え、
前記作業車両は、前記ティーチング圃場マップを、圃場の外周の走行によって取得した位置情報から作成された圃場外形の情報を含むように作成し、また、前記施肥マップから作業者の所定操作により作成された圃場外形の位置情報を含む施肥計画マップを作成し、前記施肥計画マップに設定された設定施肥量に基づき、前記施肥装置の施肥量をコントロールするよう構成され、さらに、
前記施肥計画マップの圃場外形の位置情報と、前記ティーチング圃場マップの圃場外形の位置情報を比較して、前記特定の地点の位置情報を修正するように構成されたことを特徴とする。
【0009】
上記第2の発明によれば、上記第1の発明の効果に加え、より精度よく位置情報の修正が可能となる。
【0010】
第3の発明は、上記第2の発明の構成に加え、
前記圃場外形の少なくとも1つの隅角部の位置情報を比較することによって、前記隅角部同士の位置の差異が最小となるように、前記特定の地点の位置情報を修正することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
収穫機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業装置
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用芝刈機
21日前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
乗用型苗植機
20日前
井関農機株式会社
農薬散布作業車
29日前
井関農機株式会社
炊飯用洗米装置
1か月前
井関農機株式会社
汎用コンバイン
1か月前
井関農機株式会社
乗用型苗移植機
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ