TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024171736
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088908
出願日
2023-05-30
発明の名称
作業装置
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01C
15/00 20060101AFI20241205BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】資材を繰り出す繰出部の繰出駆動軸に大きな負荷が発生するような場合でも繰出部を適切に駆動すること。
【解決手段】実施形態に係る作業装置は、後輪の駆動によって圃場内を走行しながら作業を行う作業車両において圃場へ資材を供給する作業を行うための作業装置であって、貯留部と、繰出部と、第1駆動源と、第2駆動源と、制御部とを備える。貯留部は、資材を貯留する。繰出部は、繰出駆動軸を有し、繰出駆動軸の回転によって貯留部から資材を所定の量ずつ繰り出す。第1駆動源は、繰出駆動軸へ回転動力を付与可能である。第2駆動部は、モータであり、繰出駆動軸へ回転動力を付与可能である。制御部は、第1駆動源および第2駆動源の少なくともいずれか一方から繰出駆動軸へ回転動力を付与するように制御する。
【選択図】図2
特許請求の範囲
【請求項1】
後輪の駆動によって圃場内を走行しながら作業を行う作業車両において前記圃場へ資材を供給する作業を行うための作業装置であって、
前記資材を貯留する貯留部と、
繰出駆動軸を有し、前記繰出駆動軸の回転によって前記貯留部から前記資材を所定の量ずつ繰り出す繰出部と、
前記繰出駆動軸へ回転動力を付与可能な第1駆動源と、
前記繰出駆動軸へ回転動力を付与可能なモータである第2駆動源と、
前記第1駆動源および前記第2駆動源の少なくともいずれか一方から前記繰出駆動軸へ回転動力を付与するように制御する制御部と
を備える
ことを特徴とする作業装置。
続きを表示(約 2,600 文字)
【請求項2】
前記作業車両は、前記後輪へ駆動力を付与する後輪ギヤケースを有し、
前記第1駆動源は、前記後輪ギヤケースであり、
前記繰出駆動軸は、前記後輪ギヤケースから付与される回転動力によって回転し、
前記制御部は、前記後輪のスリップを検知し、前記後輪のスリップを検知した場合には、前記繰出駆動軸への回転動力の付与を前記後輪ギヤケースから前記第2駆動源へと切り替える
ことを特徴とする請求項1に記載の作業装置。
【請求項3】
前記作業車両は、当該作業車両の現在位置を取得する測位装置を有し、
前記制御部は、前記測位装置によって取得された前記作業車両の現在位置に基づいて該作業車両の第1走行速度を算出し、前記後輪の回転数から前記作業車両の第2走行速度を算出し、前記第1走行速度と前記第2走行速度とを比較することで前記後輪のスリップを検知し、前記後輪のスリップを検知しない場合には、前記後輪ギヤケースからの回転動力の付与とする
ことを特徴とする請求項2に記載の作業装置。
【請求項4】
前記作業車両は、前記後輪へ駆動力を付与する後輪ギヤケースを有し、
前記第1駆動源は、前記後輪ギヤケースであり、
前記作業車両は、当該作業車両の現在位置を取得する測位装置を有し、
前記作業車両は、所定の固定値の供給量で前記圃場へ前記資材を供給する慣行供給作業と、区分けされた区画ごとの前記資材の供給量情報に基づいて前記圃場へ供給する前記資材の供給量を制御するマップ連動方式の供給作業とを含む前記資材の供給作業を行い、
前記制御部は、前記マップ連動方式の供給作業の場合には、前記後輪ギヤケースからの回転動力の付与とする
ことを特徴とする請求項1に記載の作業装置。
【請求項5】
前記作業車両は、当該作業車両の走行中に得られる前記圃場の情報から該圃場へ供給する前記資材の供給量を制御するリアルタイムセンシング方式の供給作業をさらに含む前記資材の供給作業を行い、
前記制御部は、前記測位装置によって取得された前記作業車両の現在位置が前記圃場外であると判断した場合には、前記後輪ギヤケースからの回転動力の付与とし、前記第2駆動源から前記繰出駆動軸へ回転動力を付与しない
ことを特徴とする請求項4に記載の作業装置。
【請求項6】
前記制御部は、前記マップ連動方式の供給作業または前記リアルタイムセンシング方式の供給作業の場合、前記繰出部による前記資材の繰出量が多い場合は前記後輪ギヤケースからの回転動力の付与とし、前記繰出部による前記資材の繰出量が少ない場合は前記第2駆動源からの回転動力の付与とする
ことを特徴とする請求項5に記載の作業装置。
【請求項7】
前記制御部は、前記マップ連動方式の供給作業または前記リアルタイムセンシング方式の供給作業の場合、前記繰出駆動軸へ付与する回転動力が所定以上となる場合は前記後輪ギヤケースからの回転動力の付与とし、前記繰出駆動軸へ付与する回転動力が所定未満となる場合は前記第2駆動源からの回転動力の付与とする
ことを特徴とする請求項5に記載の作業装置。
【請求項8】
前記制御部は、前記マップ連動方式の供給作業または前記リアルタイムセンシング方式の供給作業の場合、前記測位装置による前記作業車両の現在位置の取得ができない場合または誤検知によって前記作業車両が前記圃場外に位置している場合は前記後輪ギヤケースからの回転動力の付与とし、
前記作業車両は、前記慣行供給作業による前記資材の供給作業を行う
ことを特徴とする請求項5に記載の作業装置。
【請求項9】
前記作業車両は、前記後輪へ駆動力を付与する後輪ギヤケースを有し、
前記第1駆動源は、前記後輪ギヤケースであり、
前記第2駆動源は、前記繰出駆動軸への回転動力の付与として使用するとともに発電にも使用可能であり、前記第1駆動源から前記繰出駆動軸へ回転動力を付与する場合は発電のために蓄電する
ことを特徴とする請求項1に記載の作業装置。
【請求項10】
前記作業車両は、当該作業車両の現在位置を取得する測位装置を有し、
前記測位装置は、当該作業車両の第1走行速度をさらに取得し、
前記作業車両は、所定の固定値の供給量で前記圃場へ前記資材を供給する慣行供給作業と、区分けされた区画ごとの前記資材の供給量情報に基づいて前記圃場へ供給する前記資材の供給量を制御するマップ連動方式の供給作業と、当該作業車両の走行中に得られる前記圃場の情報から該圃場へ供給する前記資材の供給量を制御するリアルタイムセンシング方式の供給作業とを含む前記資材の供給作業を行い、
前記制御部は、前記測位装置によって取得された前記作業車両の現在位置に基づいて該作業車両の第1走行速度を算出し、前記後輪の回転数から前記作業車両の第2走行速度を算出し、前記第1走行速度と前記第2走行速度とを比較することで前記後輪のスリップを検知し、
前記慣行供給作業の場合、前記後輪のスリップを検知しない場合は前記後輪ギヤケースから前記繰出駆動軸へ回転動力を付与し、前記後輪のスリップを検知した場合は前記第2駆動源から前記繰出駆動軸へ回転動力を付与し、
前記マップ連動方式の供給作業の場合、前記後輪のスリップを検知しない場合は前記後輪ギヤケースおよび前記第2駆動源のいずれか一方を選択して前記後輪ギヤケースまたは前記第2駆動源から前記繰出駆動軸へ回転動力を付与し、前記後輪のスリップを検知した場合は前記第2駆動源から前記繰出駆動軸へ回転動力を付与し、
リアルタイムセンシング方式の供給作業の場合、前記後輪のスリップを検知しない場合は前記後輪ギヤケースおよび前記第2駆動源のいずれか一方を選択して前記後輪ギヤケースまたは前記第2駆動源から前記繰出駆動軸へ回転動力を付与し、前記後輪のスリップを検知した場合は前記第2駆動源から前記繰出駆動軸へ回転動力を付与する
ことを特徴とする請求項9に記載の作業装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、圃場内を走行しながら作業を行う作業車両に設けられ、この作業車両から圃場へ肥料、薬剤および作物の種などの資材を供給するための作業装置において、資材の貯留部から資材を繰り出す繰出部をモータで駆動する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-99418号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来技術では、たとえば、繰出部の駆動開始時や資材の詰まりの発生時のような繰出駆動軸に大きな負荷が発生するような場合には繰出部を適切に駆動することができないことがあった。
【0005】
本発明は、上記に鑑みてなされたものであって、資材を繰り出す繰出部の繰出駆動軸に大きな負荷が発生するような場合でも繰出部を適切に駆動することができる作業装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
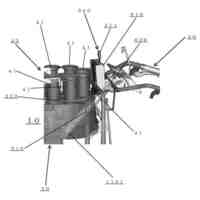
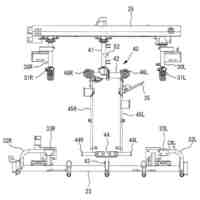
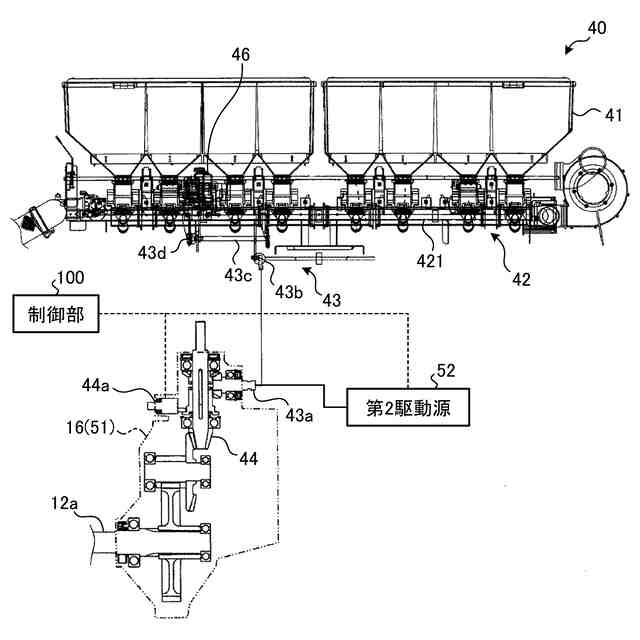
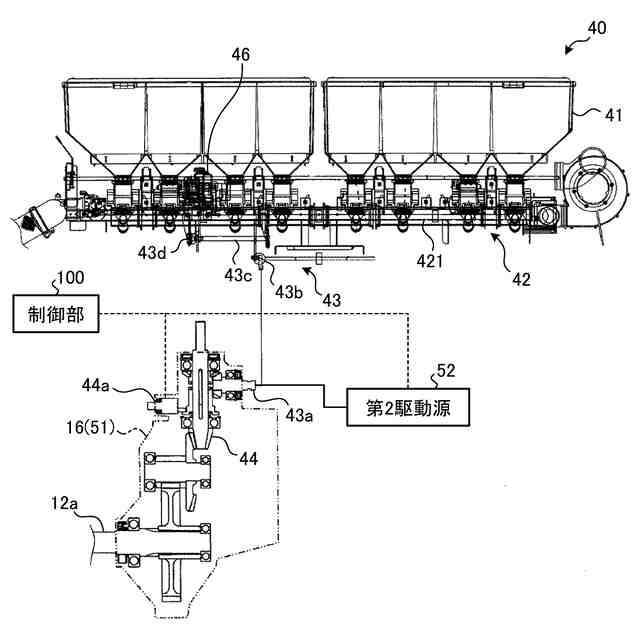
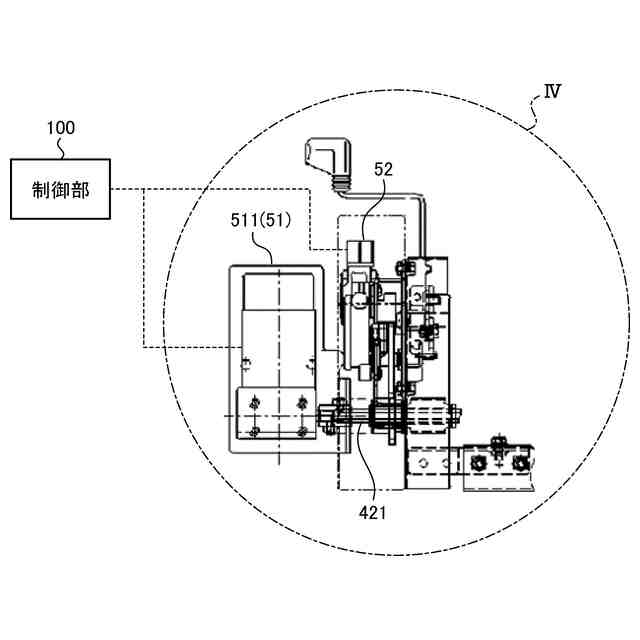
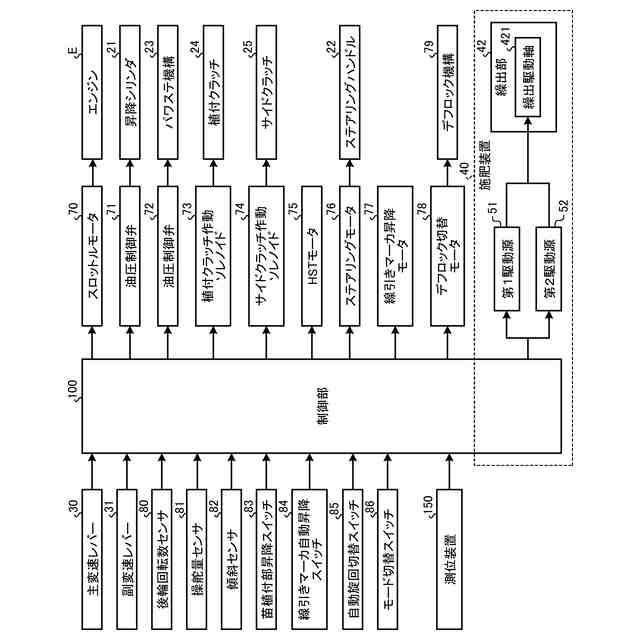
上述した課題を解決し、目的を達成するために、実施形態に係る作業装置(40)は、後輪(16)の駆動によって圃場(F)内を走行しながら作業を行う作業車両(1)において圃場(F)へ資材(M)を供給する作業を行うための作業装置(40)であって、貯留部(41)と、繰出部(42)と、第1駆動源(51)と、第2駆動源(52)と、制御部(100)とを備える。貯留部(41)は、資材(M)を貯留する。繰出部(41)は、繰出駆動軸(421)を有し、繰出駆動軸(421)の回転によって貯留部(41)から資材(M)を所定の量ずつ繰り出す。第1駆動源(51)は、繰出駆動軸(421)へ回転動力を付与可能なものである。第2駆動部(52)は、モータであり、繰出駆動軸(421)へ回転動力を付与可能なものである。制御部(100)は、第1駆動源(51)および第2駆動源(52)の少なくともいずれか一方から繰出駆動軸(421)へ回転動力を付与するように制御する。
【発明の効果】
【0007】
実施形態に係る作業装置によれば、資材を繰り出す繰出部の繰出駆動軸に大きな負荷が発生するような場合でも繰出部を適切に駆動することができる。
【図面の簡単な説明】
【0008】
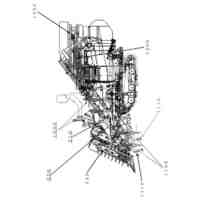
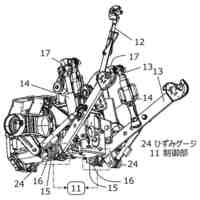
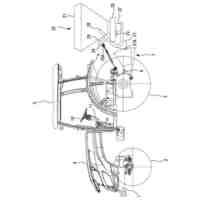
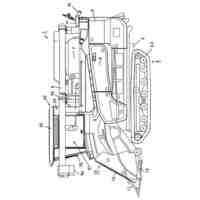
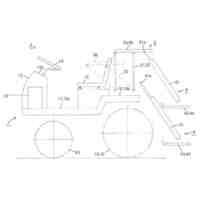
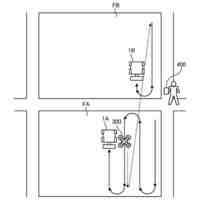
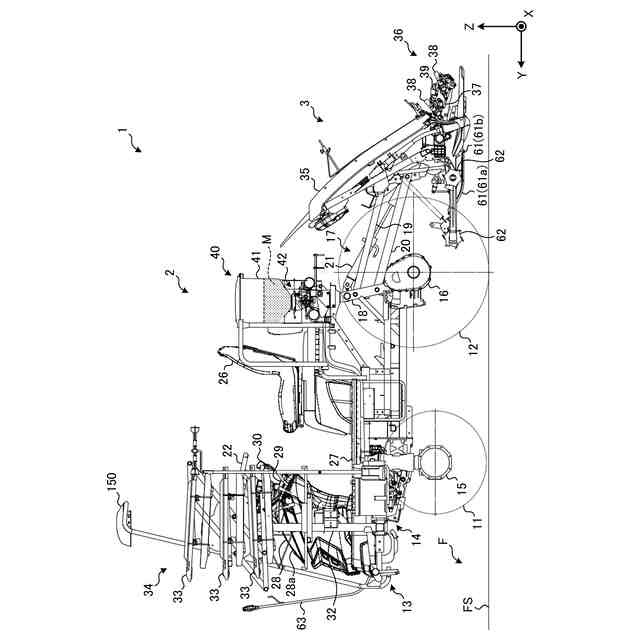
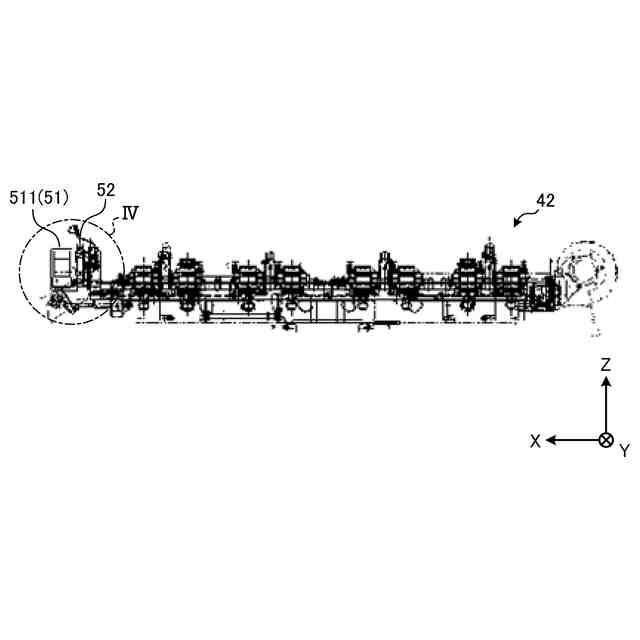
図1は、実施形態に係る作業装置を備える作業車両の一例を示す概略側面図である。
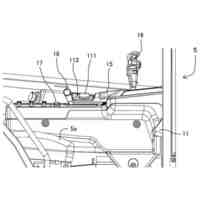
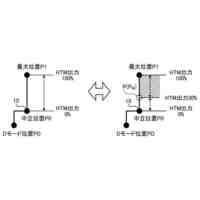
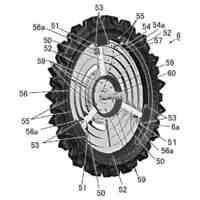
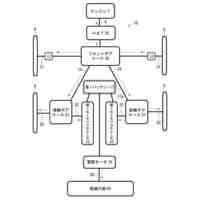
図2は、実施形態に係る作業装置の第1駆動源および第2駆動源の一例を示す図である。
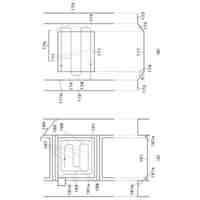
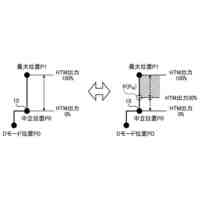
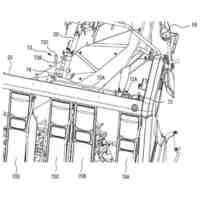
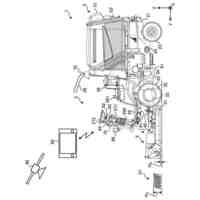
図3は、実施形態に係る作業装置の第1駆動源および第2駆動源の他の例を示す図(その1)である。
図4は、実施形態に係る作業装置の第1駆動源および第2駆動源の他の例を示す図(その2)である。
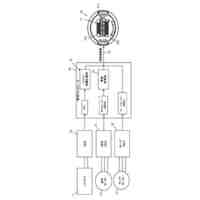
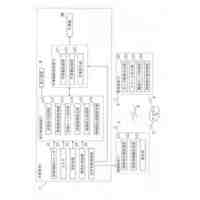
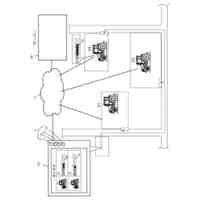
図5は、実施形態に係る作業装置を備える作業車両の制御系の一例を示すブロック図である。
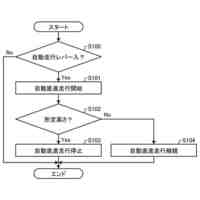
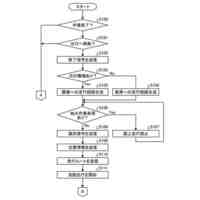
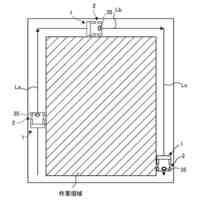
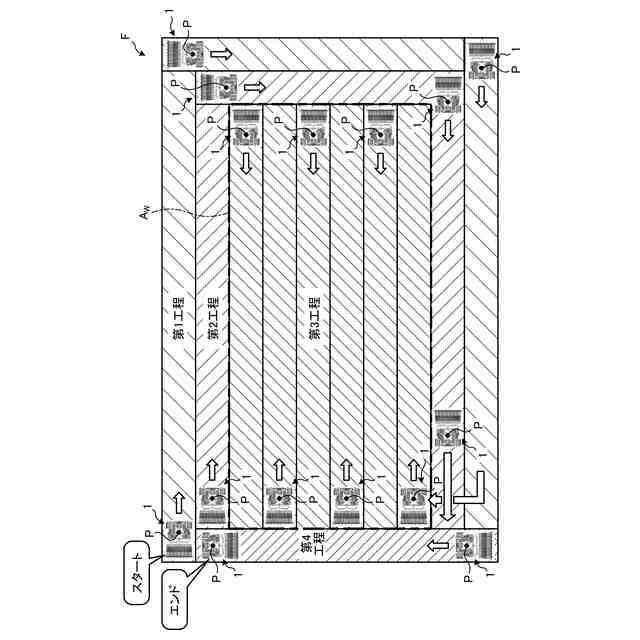
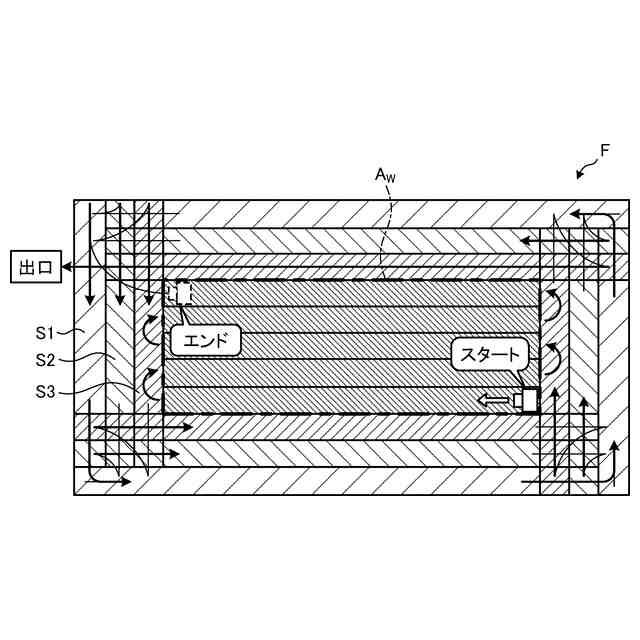
図6は、実施形態に係る作業装置を備える作業車両の自律作業の説明図(その1)である。
図7は、実施形態に係る作業装置を備える作業車両の自律作業の説明図(その2)である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業装置の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両の全体構成>
図1を参照して実施形態に係る作業装置40を備える作業車両1の全体構成について説明する。図1は、実施形態に係る作業装置40を備える作業車両1の一例を示す概略側面図である。作業車両1は、圃場F内を走行しながら圃場Fで作業を行う。作業車両1は、圃場F内を走行しながら、この圃場Fの土壌面FSに苗を植え付ける「苗移植機」である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1日前
井関農機株式会社
収穫機
1日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
コンバイン
9日前
井関農機株式会社
コンバイン
9日前
井関農機株式会社
乗用芝刈機
24日前
井関農機株式会社
乗用型苗植機
23日前
井関農機株式会社
農薬散布作業車
1か月前
井関農機株式会社
ロボット作業車両
23日前
井関農機株式会社
ロボット作業車両
3日前
井関農機株式会社
作業管理システム
1か月前
井関農機株式会社
作業車両の管理システム
1か月前
井関農機株式会社
ハイブリッドエンジン装置
23日前
井関農機株式会社
作業車のクローラ走行装置
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
水田作業機
1か月前
井関農機株式会社
自走式薬剤散布機
1か月前
個人
殺虫スプレー
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ