TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024177348
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2024173790,2023060233
出願日
2024-10-02,2021-01-20
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20241212BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 従来の田植え機などのような作業車両については、直進制御開始についての安全性や操作性が必ずしも十分でない。
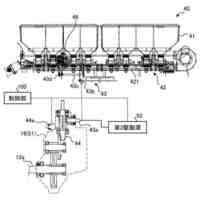
【解決手段】 車体へ取付けられた走行装置で走行しながら圃場で対地作業を行う作業車両であって、車体へ昇降可能に取付けられた対地作業装置と、車体を所定の直進向きに走行させるための直進制御を行うコントローラーと、を備え、車体の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあることを要求する車体向き条件を備え、直進制御を開始するためのユーザー指示があったとき、車体向き条件が満足されていないと判断しても、コントローラーは、直進制御を開始するが、車体の向きが直進向きを基準としてあらかじめ定められた範囲内にないと判断すれば、あらかじめ定められた時間の経過後に開始された直進制御を停止することを特徴とする作業車両。
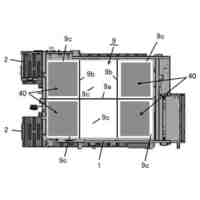
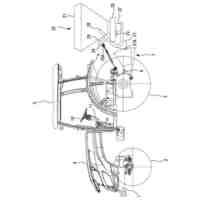
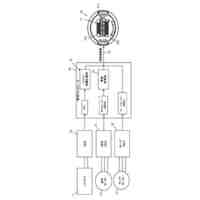
【選択図】 図2
特許請求の範囲
【請求項1】
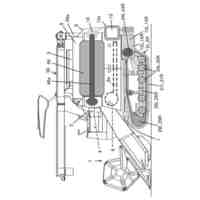
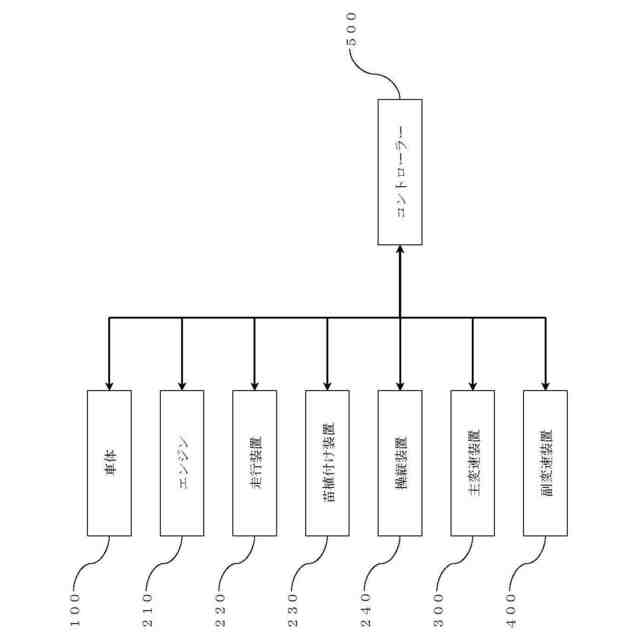
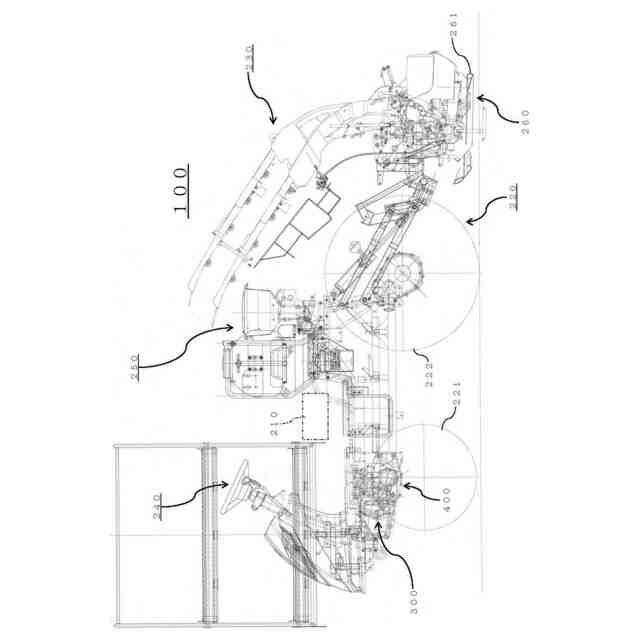
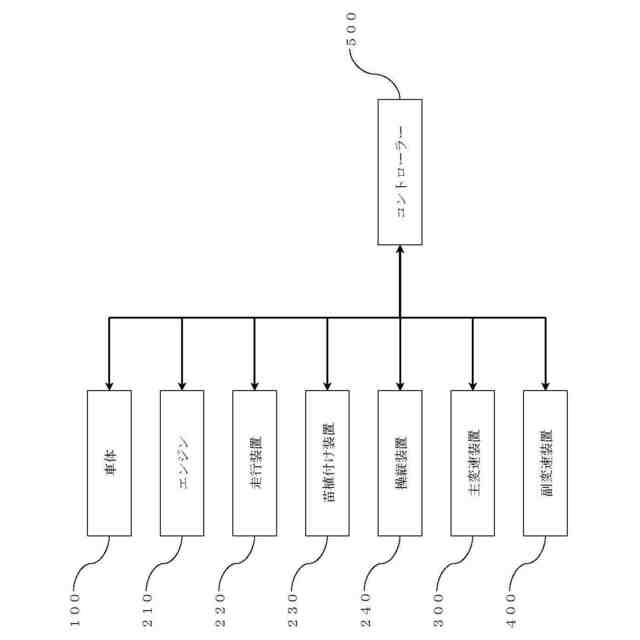
車体(100)へ取付けられた走行装置(220)で走行しながら圃場で対地作業を行う作業車両であって、
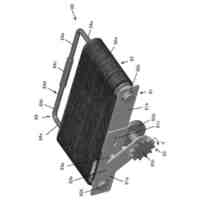
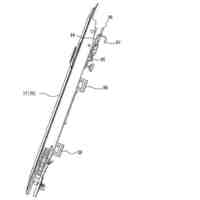
前記車体(100)へ昇降可能に取付けられた対地作業装置と、
前記車体(100)を所定の直進向きに走行させるための直進制御を行うコントローラー(500)と、を備え、
前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあることを要求する車体向き条件を備え、
前記直進制御を開始するためのユーザー指示があったとき、前記車体向き条件が満足されていないと判断しても、前記コントローラー(500)は、前記直進制御を開始するが、前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にないと判断すれば、あらかじめ定められた時間の経過後に前記開始された直進制御を停止することを特徴とする作業車両。
続きを表示(約 220 文字)
【請求項2】
前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあると判断すれば、前記停止された直進制御をさらなるユーザー指示なしに開始することを特徴とする請求項1に記載の作業車両。
【請求項3】
前記直進制御を開始するためのユーザー指示があったとき、前記コントローラー(500)は前記車体向き条件が満足されているか否かを再び判断することを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
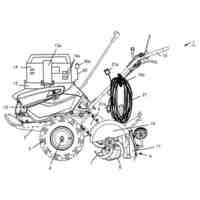
本発明は、田植え機などのような作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
苗を植付ける、車体へ昇降可能に取付けられた苗植付け装置と、車体を所定の直進向きに走行させるための直進制御を行うコントローラーと、を有し、車体へ取付けられた走行装置で走行しながら苗を植付ける田植え機が、知られている(たとえば、特許文献1および2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-024541号公報
特許第5664634号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述された従来の田植え機などのような作業車両については、直進制御開始についての安全性や操作性が必ずしも十分でない。
【0005】
本発明は、上述された従来の課題を考慮し、直進制御開始についての安全性や操作性を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、車体(100)へ取付けられた走行装置(220)で走行しながら圃場で対地作業を行う作業車両であって、
前記車体(100)へ昇降可能に取付けられた対地作業装置と、
前記車体(100)を所定の直進向きに走行させるための直進制御を行うコントローラー(500)と、を備え、
前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあることを要求する車体向き条件を備え、
前記直進制御を開始するためのユーザー指示があったとき、前記車体向き条件が満足されていないと判断しても、前記コントローラー(500)は、前記直進制御を開始するが、前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にないと判断すれば、あらかじめ定められた時間の経過後に前記開始された直進制御を停止することを特徴とする作業車両である。
【0007】
第2の本発明は、前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあると判断すれば、前記停止された直進制御をさらなるユーザー指示なしに開始することを特徴とする請求項1に記載の作業車両である。
【0008】
第3の本発明は、前記直進制御を開始するためのユーザー指示があったとき、前記コントローラー(500)は前記車体向き条件が満足されているか否かを再び判断することを特徴とする請求項1または2に記載の作業車両である。
【発明の効果】
【0009】
第1の本発明により、直進制御開始についての安全性を簡素な構成で向上することが可能である。
【0010】
第2の本発明により、第1の本発明の効果に加えて、直進制御開始についての安全性を簡素な構成で向上することが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1か月前
井関農機株式会社
収穫機
10日前
井関農機株式会社
作業機
1か月前
井関農機株式会社
田植機
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業装置
10日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
コンバイン
11日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
17日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
歩行型管理機
10日前
井関農機株式会社
農薬散布作業車
5日前
井関農機株式会社
乗用型苗移植機
23日前
井関農機株式会社
汎用コンバイン
11日前
井関農機株式会社
炊飯用洗米装置
1か月前
井関農機株式会社
作業管理システム
10日前
井関農機株式会社
営農管理システム
16日前
井関農機株式会社
作業機管理システム
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ