TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024159320
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023075242
出願日
2023-04-28
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01C
15/00 20060101AFI20241031BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
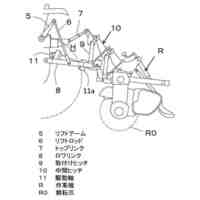
【課題】作業走行中に、自機の位置情報が取得できなくなった場合においても、施肥量を自動調節しながら作業を続行できる作業車両を提供する。
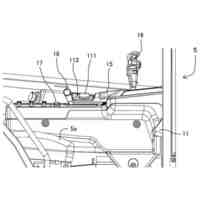
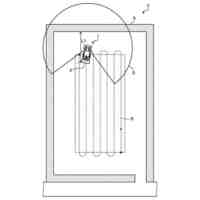
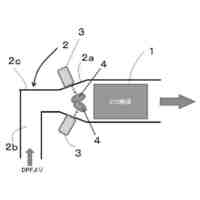
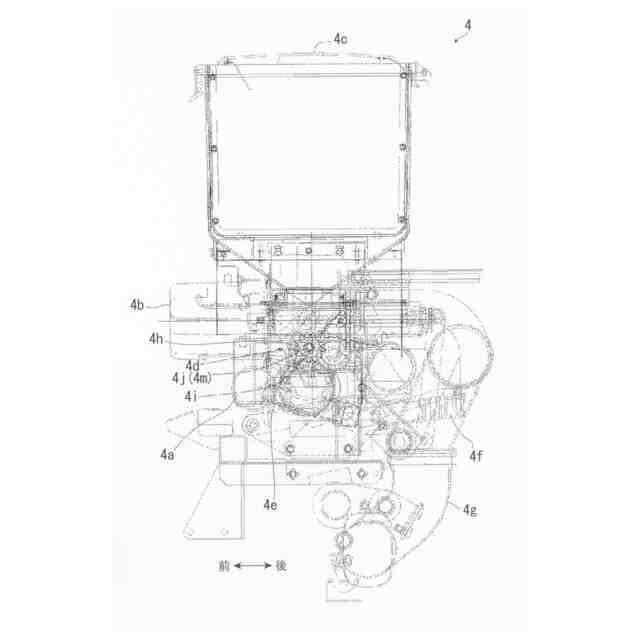
【解決手段】施肥装置4と、自機位置を取得する測位装置5とを備え、測位装置5により取得した自機位置に基づき、圃場の区画ごとに施肥量が設定された施肥マップを利用して、自機位置が属する区画に設定された目標施肥量を取得して、施肥装置の施肥量を制御するよう構成された作業車両1であって、圃場の土壌情報を取得する土壌情報取得部Jと、施肥装置4の施肥量を制御する制御装置Cとをさらに備え、施肥マップの情報に基づき、施肥装置4の施肥量を決定する施肥マップ利用施肥モードと、土壌情報取得部Jから取得した土壌情報と土壌情報学習部によって学習した土壌情報との比較によって、施肥装置4の施肥量を決定する土壌情報利用施肥モードとを選択して実行可能に構成されたことを特徴とする。
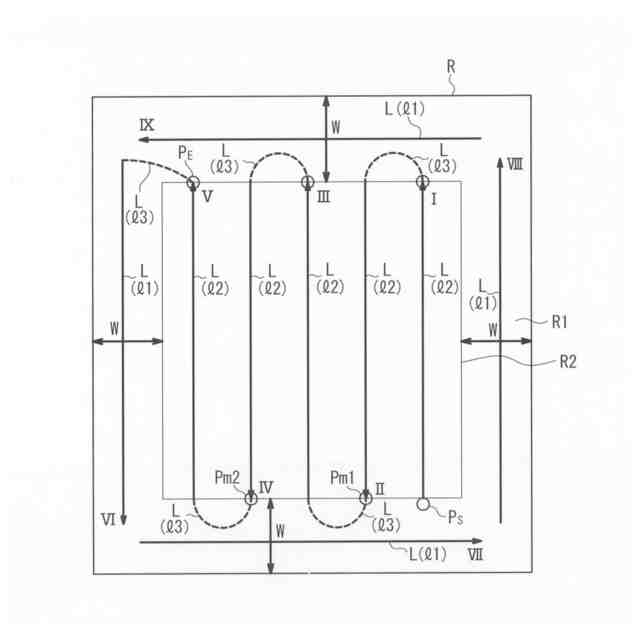
【選択図】図1
特許請求の範囲
【請求項1】
施肥装置と、自機位置を取得する測位装置とを備え、前記測位装置により取得した自機位置に基づき、圃場の区画ごとに施肥量が設定された施肥マップを利用して、自機位置が属する区画に設定された目標施肥量を取得して、前記施肥装置の施肥量を制御するよう構成された作業車両であって、
圃場の土壌情報を取得する土壌情報取得部と、前記施肥装置の施肥量を制御する制御装置とをさらに備え、
前記土壌情報取得部は、土壌の作土深を測定する作土深センサと、土壌の肥沃度を測定する肥沃度センサとを備えており、
前記制御装置は、取得した前記土壌情報を学習する土壌情報学習部を備え、
前記土壌情報取得部から前記土壌情報を取得可能に構成され、かつ、
前記施肥マップの情報に基づき、前記施肥装置の施肥量を決定する施肥マップ利用施肥モードと、前記土壌情報取得部から取得した土壌情報と前記土壌情報学習部によって学習した土壌情報との比較によって、前記施肥装置の施肥量を決定する土壌情報利用施肥モードとを選択して実行可能に構成されたことを特徴とする作業車両。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、施肥マップ利用施肥モード中に、前記測位装置が受信不良となったことを判定すると、自動で施肥マップ利用施肥モードから土壌情報利用施肥モードに切り替えるよう構成されたことを特徴とする請求項1に記載の作業車両。
【請求項3】
さらに、前記制御装置は、自動で施肥マップ利用施肥モードから土壌情報利用施肥モードに切り替えた後、前記測位装置の受信不良が解消したと判定すると、自動で土壌情報利用施肥モードから施肥マップ利用施肥モードに切り替えることを特徴とする請求項2に記載の作業車両。
【請求項4】
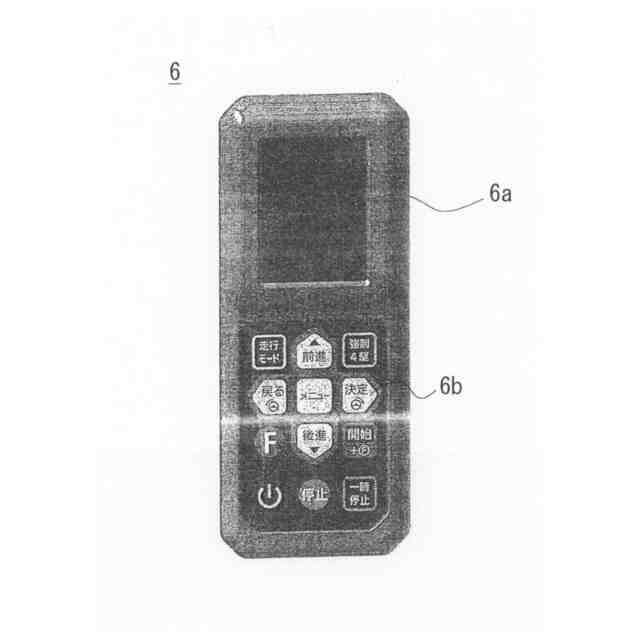
前記施肥マップの情報を記憶する携帯情報端末をさらに備え、
前記制御装置は、前記携帯情報端末から通信により、前記施肥マップの情報を取得可能に構成されるとともに、施肥マップ利用施肥モード中に、前記制御装置と前記携帯情報端末とが通信不可能となったことを判定すると、自動で施肥マップ利用施肥モードから土壌情報利用施肥モードに切り替えるよう構成されたことを特徴とする請求項1に記載の作業車両。
【請求項5】
さらに、前記制御装置は、自動で施肥マップ利用施肥モードから土壌情報利用施肥モードに切り替えた後、前記制御装置と携帯情報端末の通信が可能となったことを判定すると、自動で土壌情報利用施肥モードから施肥マップ利用施肥モードに切り替えるよう構成されたことを特徴とする請求項4に記載の作業車両。
【請求項6】
前記制御装置は、さらに、予め設定された基本施肥量を前記施肥装置の施肥量として決定する基本施肥量施肥モードを実行可能に構成され、土壌情報利用施肥モード中に、前記土壌情報取得部から土壌情報が取得できなくなったと判定すると、自動で、土壌情報利用施肥モードから基本施肥量施肥モードに切り替えるよう構成されたことを特徴とする請求項4または請求項5に記載の作業車両。
【請求項7】
前記制御装置は、施肥マップ利用施肥モードによって決定される施肥量と、土壌情報利用施肥モードによって決定される施肥量を、それぞれ重み付けの上、加算することで施肥量が決定されるハイブリッド施肥モードを選択して実行可能に構成されたことを特徴とする請求項1から請求項6のいずれか1項に記載の作業車両。
【請求項8】
前記作業車両は、予め設定された目標走行経路上を自動走行可能に構成され、さらに、前記目標走行経路上に、自動走行を一時停止する複数の停止位置が予め設定されており、前記作業車両の自動走行中、前記携帯情報端末が所定操作されると、予め設定された停止位置をスキップするよう構成されたこと特徴とする請求項1から請求項7のいずれか1項に記載の作業車両。
【請求項9】
前記土壌情報学習部による土壌情報の学習を、前記携帯情報端末の操作によって開始し、あるいは、終了できるよう構成されたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場を走行しながら施肥を行う作業車両に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、農業従事者の高齢化や労働力不足が問題視される中、我が国における販売農家1戸当たりの経営農地面積は増加傾向にあり、今後もこの傾向は継続するものと予測されている。これに応じて、ロボット技術やICTを活用して超省力・高品質生産を実現するスマート農業への関心が益々高まっている。
【0003】
このような潮流の中、農作業を行う作業車両の技術分野においては、例えば、下記特許文献1に示されるように、GPS等の測位衛星システムを利用し、圃場内において、作業車両を無人操縦により走行させることで作業のスマート化が図られている。
【0004】
ところで、圃場全体の作物の生育を平準化することは、作物の倒伏等を防止する上で、従来からの課題となっている。しかしながら、圃場内において、作物を生育する環境は均一でなく、圃場内の場所により作物の育ちやすさが異なることが通常であり、圃場の面積が大きいほど、生育度合いにバラツキが生じやすい。そこで、圃場内において、作物の育ちやすい場所では、施肥量を増やし、育ちにくい場所では、施肥量を減らすことで、圃場全体の作物の生育の平準化が図られる。例えば、下記特許文献2に記載されているように、無人操縦により走行可能な作業車両の技術分野においては、圃場の所定区画ごとに目標となる施肥量が設定された施肥計画マップの情報を用いて、圃場内の位置に応じて、作業車両の施肥量を自動で調節する技術が公知である。なお、この施肥計画マップは、圃場の所定区画ごとに、その区画の位置情報と目標となる施肥量が紐づけられて記録されたデータであり、作物が育ちやすい区画では、施肥量が少なく、育ちにくい区画では、施肥量が多く設定される。
【0005】
この施肥計画マップの情報を用い、従来の作業車両は、作業走行中、所定の時間間隔で、自機の位置情報を取得することで、自機が作業を行っている圃場の区画を特定し、特定された区画に紐づけられた目標の施肥量となるように、施肥装置を自動制御する。これにより、従来の作業車両は、圃場を自動で走行しつつ、圃場の区画毎に施肥量の自動調節することが可能となっている。
【先行技術文献】
【特許文献】
【0006】
特開平11-266608号公報
特開2021-101667号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の作業車両は、作業走行中に、GPS等の測位衛星システムの受信不良などにより、自機の位置情報が取得できなくなった場合、自機が存在する圃場の区画を特定することができないため、施肥量の自動調節をすることができない。これにより、作業が中断され、作業効率が大幅な低下するおそれがあった。
【0008】
そこで、本発明は、このような問題を解消し、作業走行中に、自機の位置情報が取得できなくなった場合においても、施肥量を自動調節しながら作業を続行できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、第1の発明は、
施肥装置と、自機位置を取得する測位装置とを備え、前記測位装置により取得した自機位置に基づき、圃場の区画ごとに施肥量が設定された施肥マップを利用して、自機位置が属する区画に設定された目標施肥量を取得して、前記施肥装置の施肥量を制御するよう構成された作業車両であって、
圃場の土壌情報を取得する土壌情報取得部と、前記施肥装置の施肥量を制御する制御装置とをさらに備え、
前記土壌情報取得部は、土壌の作土深を測定する作土深センサと、土壌の肥沃度を測定する肥沃度センサとを備えており、
前記制御装置は、取得した前記土壌情報を学習する土壌情報学習部を備え、
前記土壌情報取得部から前記土壌情報を取得可能に構成され、かつ、
前記施肥マップの情報に基づき、前記施肥装置の施肥量を決定する施肥マップ利用施肥モードと、前記土壌情報取得部から取得した土壌情報と前記土壌情報学習部によって学習した土壌情報との比較によって、前記施肥装置の施肥量を決定する土壌情報利用施肥モードとを選択して実行可能に構成されたことを特徴とする作業車両を提供する。
【0010】
上記第1の発明によれば、自機の位置情報が取得できなくなった場合においても、土壌情報利用施肥モードの選択実行によって、施肥量の自動調節をすることができ、その結果、作業効率の低下を防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1か月前
井関農機株式会社
収穫機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
精米設備
3日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
収穫作業機
4日前
井関農機株式会社
洗米炊飯装置
24日前
井関農機株式会社
乗用型苗植機
10日前
井関農機株式会社
乗用型苗移植機
10日前
井関農機株式会社
多条植付用の苗移植機
4日前
井関農機株式会社
苗マット取り出しシステム
12日前
井関農機株式会社
植物工場の生産流通システム
3日前
井関農機株式会社
SCRシステムおよび尿素水タンク
28日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
苗マット取り出し装置
12日前
個人
ペット用玩具
25日前
井関農機株式会社
作業車両
4日前
個人
植裁物への水やり装置
10日前
タキイ種苗株式会社
レタス植物
18日前
株式会社ロッソ
植物栽培器
14日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ