TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024161835
公報種別
公開特許公報(A)
公開日
2024-11-20
出願番号
2023076921
出願日
2023-05-08
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人藤本パートナーズ
主分類
A01C
15/00 20060101AFI20241113BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場毎に、施肥量の決定方法を柔軟に変更して施肥作業を可能とする作業車両を提供する。
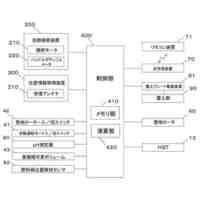
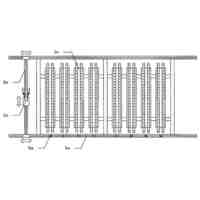
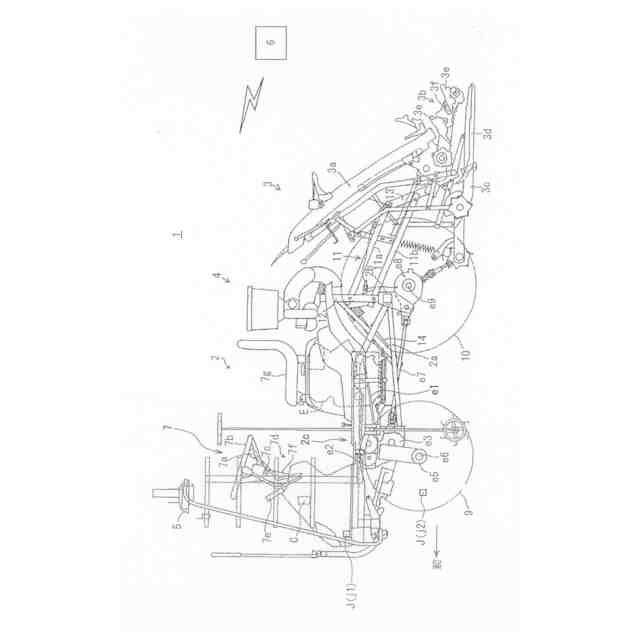
【解決手段】土壌情報取得部Jと、制御装置Cとを備え、土壌情報取得部Jは、土壌の作土深を測定する作土深センサj1と、土壌の肥沃度を測定する肥沃度センサj2とを備えており、制御装置Cは、前記取得した土壌情報を学習する土壌情報学習部を備え、土壌情報取得部Jから土壌情報を取得可能に構成され、施肥マップ利用施肥モードと、土壌情報取得部Jから取得した土壌情報と土壌情報学習部によって学習した土壌情報との比較によって、施肥装置Cの施肥量を決定する土壌情報利用施肥モードとを選択可能に構成されまた、土壌情報利用施肥モードによって算出される施肥量を、圃場の区画ごとに平均値を算出してマップ化した土壌情報利用施肥マップを作成し、施肥マップの情報及び前記土壌情報利用施肥マップの情報を表示部に表示可能に構成された。
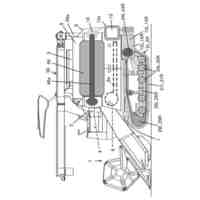
【選択図】図1
特許請求の範囲
【請求項1】
施肥装置と、自機位置を取得する測位装置とを備え、前記測位装置により取得した自機位置に基づき、圃場の区画ごとに施肥量が設定された施肥マップを利用して、自機位置が属する区画に設定された目標施肥量を取得して、前記施肥装置の施肥量を制御するよう構成された作業車両であって、
圃場の土壌情報を取得する土壌情報取得部と、前記施肥装置の施肥量を制御する制御装置とをさらに備え、
前記土壌情報取得部は、土壌の作土深を測定する作土深センサと、土壌の肥沃度を測定する肥沃度センサとを備えており、
前記制御装置は、取得した土壌情報を学習する土壌情報学習部を備え、
前記土壌情報取得部から前記土壌情報を取得可能に構成され、かつ、
前記施肥マップの情報に基づき、前記施肥装置の施肥量を決定する施肥マップ利用施肥モードと、前記土壌情報取得部から取得した土壌情報と前記土壌情報学習部によって学習した土壌情報との比較によって、前記施肥装置の施肥量を決定する土壌情報利用施肥モードとを選択して実行可能に構成され、
また、前記土壌情報利用施肥モードによって算出される施肥量を、圃場の区画ごとに平均値を算出してマップ化した土壌情報利用施肥マップを作成し、前記施肥マップの情報及び前記土壌情報利用施肥マップの情報を表示部に表示可能に構成されたことを特徴とする作業車両。
続きを表示(約 880 文字)
【請求項2】
管理圃場に関する情報を管理する圃場群情報管理部を備え、
前記圃場群情報管理部は、圃場群情報を作成する圃場群情報作成部と、圃場群分析情報を作成する圃場群分析情報作成部と、管理圃場に関する情報を記憶する圃場群情報記憶部とを備え、
前記圃場群情報は、複数の圃場の前記施肥マップ及び前記土壌情報利用施肥マップの情報を含んで構成され、
前記圃場群分析情報作成部は、前記圃場群情報から、圃場の肥沃度の評価を示す肥沃度ランクを算出して前記圃場群分析情報に含めるように構成されており、前記圃場群分析情報を前記表示部に表示可能に構成されたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、さらに、予め設定された基本施肥量を前記施肥装置の施肥量として決定する基本施肥量施肥モードを実行可能に構成され、
前記基本施肥量を設定する基本施肥量設定部を備え、
前記基本施肥量設定部は、作業者が、管理圃場に含まれる複数の圃場の中から、標準圃場を選択して基本施肥量を設定すると、標準圃場として選択されなかった圃場についても、前記圃場群分析情報に基づき自動設定するよう構成されたことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記基本施肥量設定部は、標準圃場として選択されなかった圃場に自動設定する基本施肥量が、設定上限値から設定下限値の範囲内にないとき、設定上限値から設定下限値の範囲内となるように自動修正することを特徴とする請求項3に記載の作業車両。
【請求項5】
前記制御装置は、施肥マップ利用施肥モードの実行中、作土深センサによって測定された作土深が設定深さ以上となったとき、自動で土壌情報利用施肥モードに切り替えるよう構成されたことを特徴とする請求項1に記載の作業車両。
【請求項6】
前記圃場群情報は、圃場ごとの苗の倒伏位置を示す倒伏位置マップと、施肥総量、収量総量に関する情報を含むことを特徴とする請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場を走行しながら施肥を行う作業車両に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、農業従事者の高齢化や労働力不足が問題視される中、我が国における販売農家1戸当たりの経営農地面積は増加傾向にあり、今後もこの傾向は継続するものと予測されている。これに応じて、ロボット技術やICTを活用して超省力・高品質生産を実現するスマート農業への関心が益々高まっている。
【0003】
このような潮流の中、農作業を行う作業車両の技術分野においては、例えば、下記特許文献1に示されるように、GPS等の測位衛星システムを利用し、圃場内において、作業車両を無人操縦により走行させることで作業のスマート化が図られている。
【0004】
ところで、圃場全体の作物の生育を平準化することは、作物の倒伏等を防止する上で、従来からの課題となっている。しかしながら、圃場内において、作物を生育する環境は均一でなく、圃場内の場所により作物の育ちやすさが異なることが通常であり、圃場の面積が大きいほど、生育度合いにバラツキが生じやすい。そこで、圃場内において、作物の育ちやすい場所では、施肥量を増やし、育ちにくい場所では、施肥量を減らすことで、圃場全体の作物の生育の平準化が図られる。例えば、下記特許文献2に記載されているように、無人操縦により走行可能な作業車両の技術分野においては、圃場の所定区画ごとに目標となる施肥量が設定された施肥計画マップの情報を用いて、圃場内の位置に応じて、作業車両の施肥量を自動で調節する技術が公知である。なお、この施肥計画マップは、圃場の所定区画ごとに、その区画の位置情報と目標となる施肥量が紐づけられて記録されたデータであり、作物が育ちやすい区画では、施肥量が少なく、育ちにくい区画では、施肥量が多く設定される。
【0005】
この施肥計画マップの情報を用い、従来の作業車両は、作業走行中、所定の時間間隔で、自機の位置情報を取得することで、自機が作業を行っている圃場の区画を特定し、特定された区画に紐づけられた目標の施肥量となるように、施肥装置を自動制御する。これにより、従来の作業車両は、圃場を自動で走行しつつ、圃場の区画毎に施肥量の自動調節することが可能となっている。
【先行技術文献】
【特許文献】
【0006】
特開平11-266608号公報
特開2021-101667号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の作業車両は、複数の圃場に対して、施肥作業を行おうとする場合、圃場毎に施肥マップを用意しなければならず、作業負担の増加を招いていた。特に、耕作放棄地であった場所を新たな圃場として、施肥作業を行う場合など、過去のデータやプラクティスが乏しいことにより、施肥マップを用意することが難しい場合も存在する。
【0008】
また、複数の圃場に対して施肥作業を行う場合、場所によって作土深(すなわち、作土層の深さ)の差が通常より大きい圃場などでは、必ずしも施肥マップによる施肥作業が有効でなく、作土深の深い地点で苗が育ちすぎて倒伏が生じてしまうことがある。したがって、圃場毎に、施肥量の決定方法を柔軟に変更して施肥作業を行いたいというニーズが存在する。
【0009】
そこで、本発明は、このような問題を解消し、複数の圃場に対して、圃場毎に施肥マップを用意しなければならない作業負担を軽減するとともに、圃場毎に、施肥量の決定方法を柔軟に変更して施肥作業を可能とする作業車両を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記の目的を達成するため、第1の発明は、
施肥装置と、自機位置を取得する測位装置とを備え、前記測位装置により取得した自機位置に基づき、圃場の区画ごとに施肥量が設定された施肥マップを利用して、自機位置が属する区画に設定された目標施肥量を取得して、前記施肥装置の施肥量を制御するよう構成された作業車両であって、
圃場の土壌情報を取得する土壌情報取得部と、前記施肥装置の施肥量を制御する制御装置とをさらに備え、
前記土壌情報取得部は、土壌の作土深を測定する作土深センサと、土壌の肥沃度を測定する肥沃度センサとを備えており、
前記制御装置は、取得した土壌情報を学習する土壌情報学習部を備え、
前記土壌情報取得部から前記土壌情報を取得可能に構成され、かつ、
前記施肥マップの情報に基づき、前記施肥装置の施肥量を決定する施肥マップ利用施肥モードと、前記土壌情報取得部から取得した土壌情報と前記土壌情報学習部によって学習した土壌情報との比較によって、前記施肥装置の施肥量を決定する土壌情報利用施肥モードとを選択して実行可能に構成され、
また、前記土壌情報利用施肥モードによって算出される施肥量を、圃場の区画ごとに平均値を算出してマップ化した土壌情報利用施肥マップを作成し、前記施肥マップの情報及び前記土壌情報利用施肥マップの情報を表示部に表示可能に構成されたことを特徴とする作業車両を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
12日前
井関農機株式会社
作業機
13日前
井関農機株式会社
作業車両
今日
井関農機株式会社
苗移植機
22日前
井関農機株式会社
苗移植機
22日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
乗用芝刈機
12日前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
電動作業車の安全装置
26日前
井関農機株式会社
移植機
12日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
籾摺選別機
5日前
個人
除草装置
21日前
個人
柄杓じょうろ
12日前
個人
ペット用リード
1日前
個人
猫砂ふるいパック
20日前
個人
植物栽培装置
27日前
個人
水耕栽培装置
1か月前
井関農機株式会社
作業機
13日前
株式会社シマノ
釣竿
1か月前
個人
引張犬散歩補助ベルト
21日前
井関農機株式会社
コンバイン
1か月前
個人
植物の栽培管理システム
12日前
井関農機株式会社
コンバイン
1か月前
株式会社共和
果実回し具
12日前
個人
回転式草刈刃
1か月前
個人
タケノコの多収栽培法
13日前
個人
動物用罠及び罠用装置
26日前
株式会社シマノ
釣竿
1か月前
株式会社シマノ
両軸受リール
20日前
松山株式会社
農作業機
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ