TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024161165
公報種別
公開特許公報(A)
公開日
2024-11-15
出願番号
2024146840,2022166298
出願日
2024-08-28,2020-05-07
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20241108BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来の田植え機などのような作業車両は、車体の旋回制御を行うことができない。
【解決手段】制御装置(200)は、車速を制御し、制御装置(200)は、第一の規制速度、および第一の規制速度より小さい第二の規制速度を利用して車速を規制することにより車速を制御し、直進制御を開始する直進制御開始タイミングの少なくとも近傍で、車速は第二の規制速度を超えないように規制され、第二の規制速度の期間においては、車速が第二の規制速度と一致するように規制され、制御装置(200)は、直進させられていた車体(10)を停止させて後進させ再び停止させた後に旋回させるときにも旋回制御を行い、車体(10)が後進させられるときに、制御装置(200)は第二の規制速度を超えない第三の規制速度を利用して車速を規制することを特徴とする作業車両。
【選択図】 図4
特許請求の範囲
【請求項1】
操舵部材(52)を駆動する操舵部材駆動装置(44)と、
前記操舵部材駆動装置(44)を制御する制御装置(200)と、
を備え、
前記制御装置(200)が、直進させられていた車体(10)を旋回させるときに旋回制御を行い、車体(10)を直進させるときや、旋回させられていた車体(10)を再び直進させるときに直進制御を行う、作業車両であって、
前記制御装置(200)は、車速を制御し、
前記制御装置(200)は、第一の規制速度、および前記第一の規制速度より小さい第二の規制速度を利用して前記車速を規制することにより前記車速を制御し、
前記直進制御を開始する直進制御開始タイミングの少なくとも近傍で、前記車速は前記第二の規制速度を超えないように規制され、
前記第二の規制速度の期間においては、前記車速が前記第二の規制速度と一致するように規制され、
前記制御装置(200)は、前記直進させられていた車体(10)を停止させて後進させ再び停止させた後に旋回させるときにも前記旋回制御を行い、
前記車体(10)が後進させられるときに、前記制御装置(200)は前記第二の規制速度を超えない第三の規制速度を利用して前記車速を規制することを特徴とする作業車両。
続きを表示(約 96 文字)
【請求項2】
前記旋回制御を終了する旋回制御終了タイミングの少なくとも近傍で、前記車速は前記第二の規制速度を超えないように規制されることを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植え機などのような作業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車体へ昇降可能に取付けられた植付け装置と、ステアリングハンドルを駆動するステアリングモーターと、ステアリングモーターにステアリングハンドルを駆動させることにより、車体の直進制御を行う制御装置と、を有する田植え機が、知られている(たとえば、特許文献1および2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
特開2002-335720号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述された従来の田植え機などのような作業車両は、車体の旋回制御を行うことができない。
【0005】
本発明は、上述された従来の課題を考慮し、車体の旋回制御を行うことができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、操舵部材(52)を駆動する操舵部材駆動装置(44)と、
前記操舵部材駆動装置(44)を制御する制御装置(200)と、
を備え、
前記制御装置(200)が、直進させられていた車体(10)を旋回させるときに旋回制御を行い、車体(10)を直進させるときや、旋回させられていた車体(10)を再び直進させるときに直進制御を行う、作業車両であって、
前記制御装置(200)は、車速を制御し、
前記制御装置(200)は、第一の規制速度、および前記第一の規制速度より小さい第二の規制速度を利用して前記車速を規制することにより前記車速を制御し、
前記直進制御を開始する直進制御開始タイミングの少なくとも近傍で、前記車速は前記第二の規制速度を超えないように規制され、
前記第二の規制速度の期間においては、前記車速が前記第二の規制速度と一致するように規制され、
前記制御装置(200)は、前記直進させられていた車体(10)を停止させて後進させ再び停止させた後に旋回させるときにも前記旋回制御を行い、
前記車体(10)が後進させられるときに、前記制御装置(200)は前記第二の規制速度を超えない第三の規制速度を利用して前記車速を規制することを特徴とする作業車両である。
【0007】
第2の本発明は、前記旋回制御を終了する旋回制御終了タイミングの少なくとも近傍で、前記車速は前記第二の規制速度を超えないように規制されることを特徴とする第1の本発明の作業車両である。
【発明の効果】
【0008】
第1の本発明により、車体の旋回制御を行うことが可能である。また、利便性の高い制御を実現することが可能である。
【0009】
第2の本発明により、第1の本発明の効果に加えて、精密性の高い制御を実現することが可能である。
【図面の簡単な説明】
【0010】
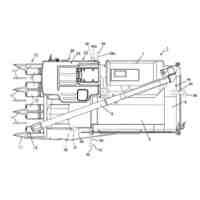
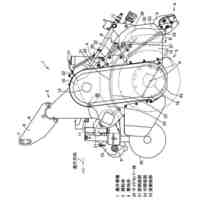
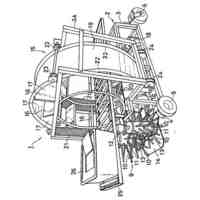
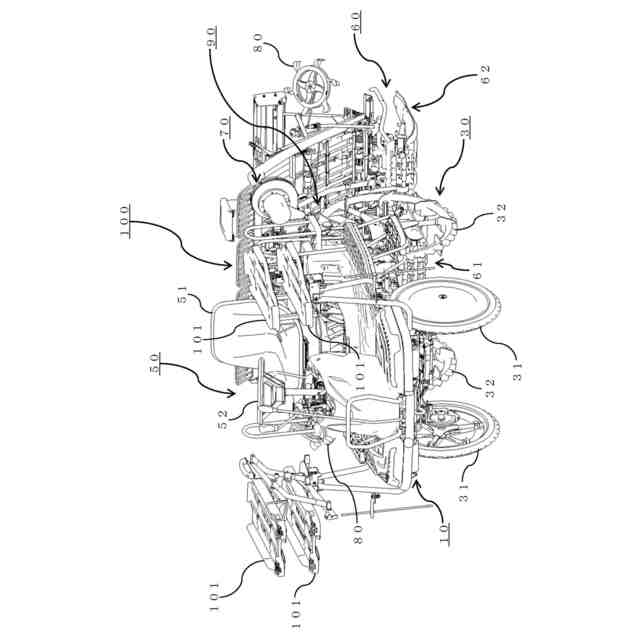
本発明における実施の形態の田植え機の斜視図
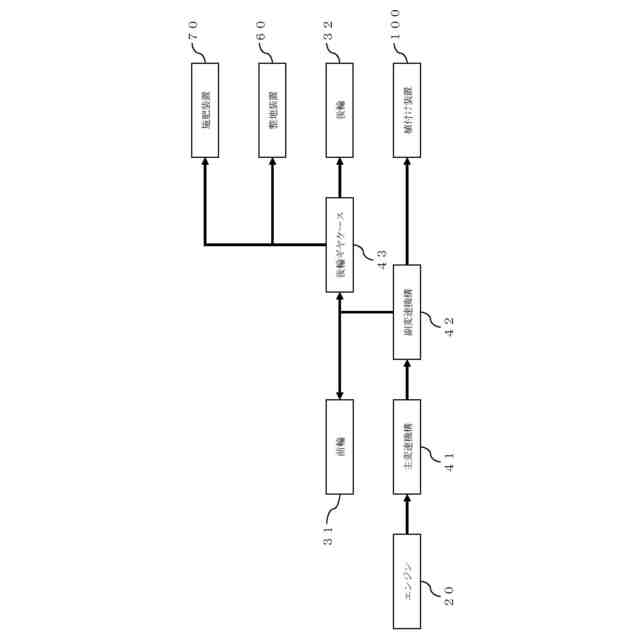
本発明における実施の形態の田植え機の動力伝達系のブロック図
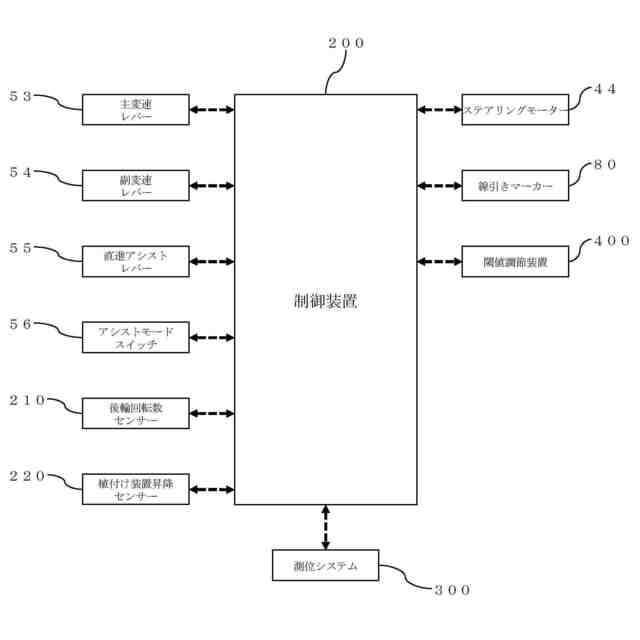
本発明における実施の形態の田植え機の制御系のブロック図
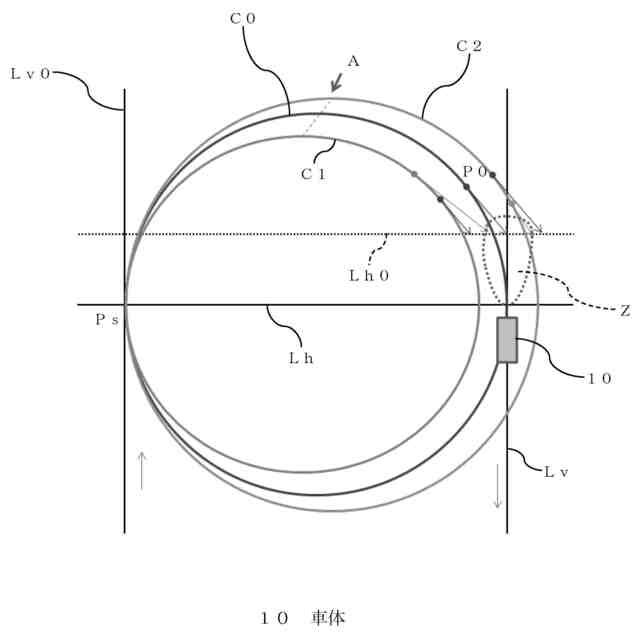
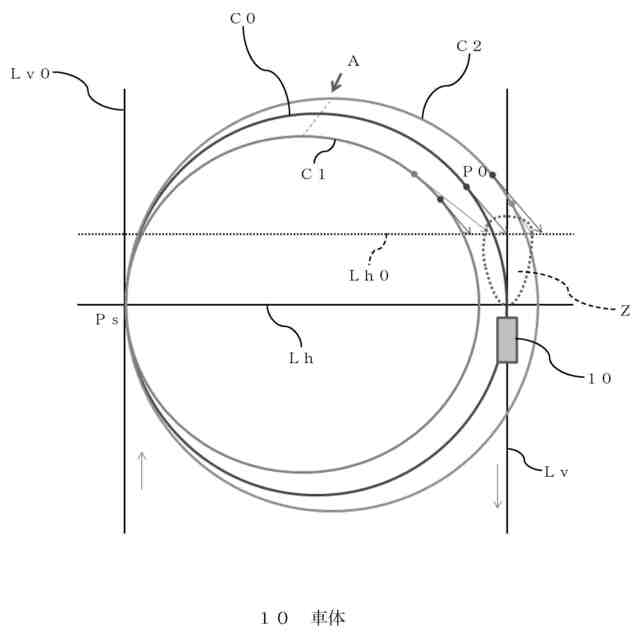
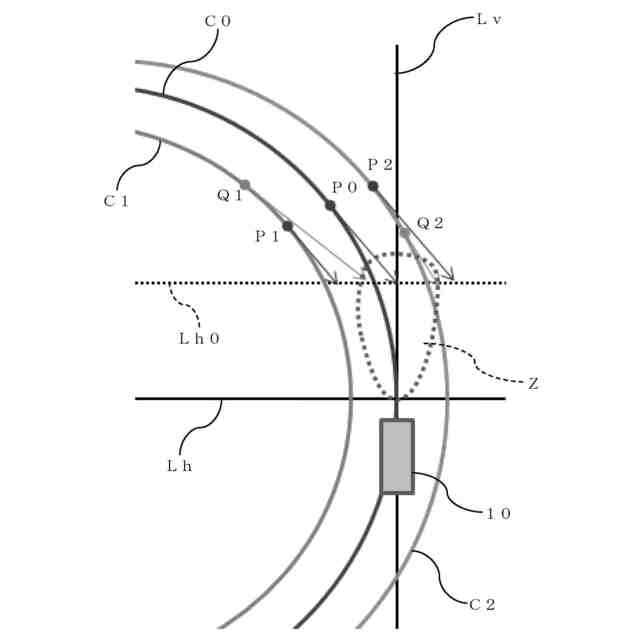
本発明における実施の形態の田植え機の旋回制御の説明図(その一)
本発明における実施の形態の田植え機の旋回制御の拡大説明図
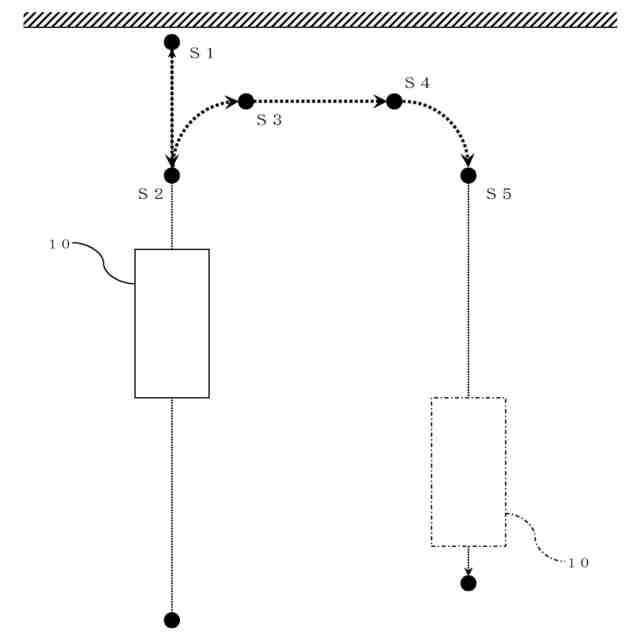
本発明における実施の形態の田植え機のバックターン制御の説明図
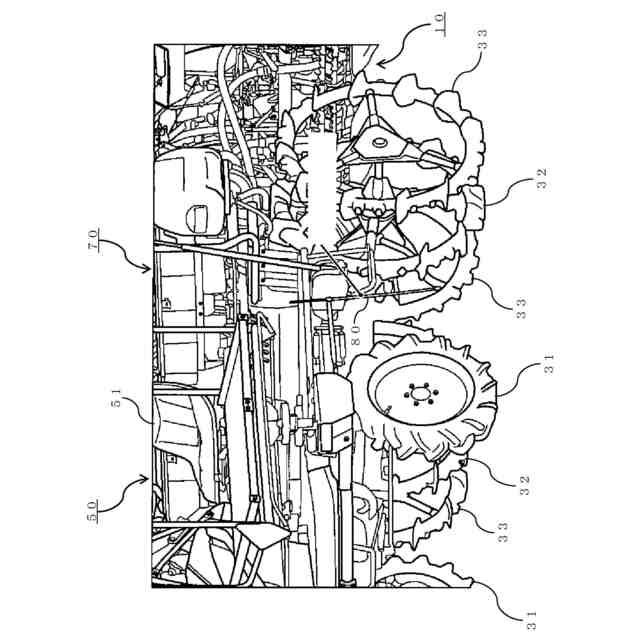
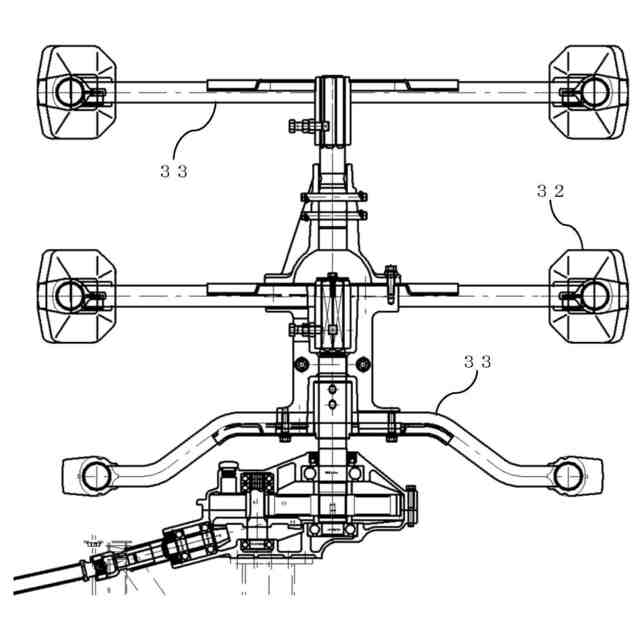
本発明における実施の形態の田植え機の部分斜視図
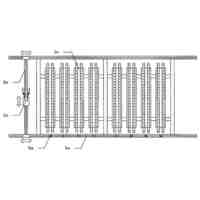
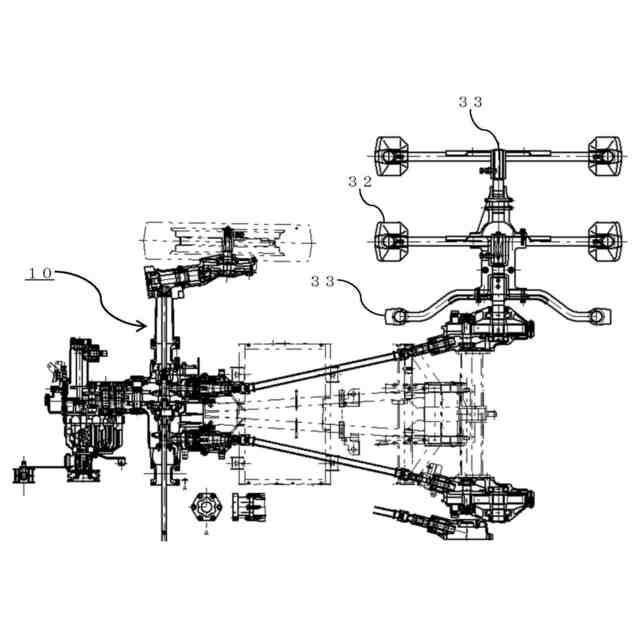
本発明における実施の形態の田植え機の部分平面図
本発明における実施の形態の田植え機の補助車輪近傍の拡大部分平面図
本発明における実施の形態の田植え機の旋回制御の説明図(その二)
本発明における実施の形態の田植え機の旋回制御の説明図(その三)
本発明における実施の形態の田植え機の旋回制御の説明図(その四)
本発明における実施の形態の田植え機の旋回制御の説明図(その五)
本発明における実施の形態の田植え機の旋回制御の説明図(その六)
本発明における実施の形態の田植え機の旋回制御の説明図(その七)
本発明における実施の形態の田植え機の旋回制御の説明図(その八)
本発明における実施の形態の田植え機の旋回制御の説明図(その九)
本発明における実施の形態の田植え機の旋回制御の説明図(その十)
本発明における実施の形態の田植え機の旋回制御の説明図(その十一)
本発明における実施の形態の田植え機の旋回制御の説明図(その十二)
本発明における実施の形態の田植え機の旋回制御の説明図(その十三)
本発明における実施の形態の田植え機の旋回制御の説明図(その十四)
本発明における実施の形態の田植え機の旋回制御の説明図(その十五)
本発明における実施の形態の田植え機の運転ユニット近傍の部分斜視図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
除草装置
16日前
個人
柄杓じょうろ
7日前
個人
猫砂ふるいパック
15日前
個人
植物栽培装置
22日前
個人
水耕栽培装置
28日前
井関農機株式会社
作業機
8日前
個人
引張犬散歩補助ベルト
16日前
株式会社シマノ
釣竿
28日前
個人
植物の栽培管理システム
7日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
株式会社共和
果実回し具
7日前
個人
回転式草刈刃
1か月前
個人
動物用罠及び罠用装置
21日前
株式会社シマノ
釣竿
28日前
個人
タケノコの多収栽培法
8日前
日機装株式会社
浄化ユニット
17日前
松山株式会社
農作業機
9日前
松山株式会社
農作業機
28日前
株式会社シマノ
両軸受リール
15日前
個人
水活用による果樹の結実安定化法
28日前
伊東電機株式会社
植物栽培装置
7日前
株式会社山田鉄工
海苔網処理船
28日前
個人
直蒔き水稲栽培法とその補助機器
28日前
マコー株式会社
水生生物育成装置
7日前
株式会社猫壱
ペット用食器
22日前
花王株式会社
殺菌剤組成物
15日前
株式会社山田鉄工
海苔網処理方法
28日前
グローブライド株式会社
釣竿
7日前
株式会社クボタ
収穫機
15日前
個人
太陽光パネル付植物栽培システム
1か月前
株式会社クボタ
農作業車
15日前
株式会社大貴
清掃具及び動物用トイレ
9日前
マクロス株式会社
鶏の捕獲及び籠詰め機
8日前
個人
友釣り用フック
8日前
株式会社アテックス
コンバインの排稈カッター
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ