TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173326
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091673
出願日
2023-06-02
発明の名称
作業管理システム
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/46 20240101AFI20241205BHJP(制御;調整)
要約
【課題】無人飛行機を適切に飛行させ、かつ、無人飛行機による監視を容易にする作業管理システムを提供すること。
【解決手段】実施形態の一態様に係る作業管理システムは、直進工程と旋回工程とを繰り返して往復走行しつつ、作業を行う複数の作業車両と、カメラを有し、複数の作業車両の周囲を飛行可能な無人航空機と、複数の作業車両、および、無人航空機と通信する監視装置とを備える。作業車両は、自己の車両位置情報を検出する第1測位装置を備える。無人航空機は、自己の航空機位置情報を検出する第2測位装置を備える。無人航空機は、作業車両による直進工程が終了した場合に、直進工程が終了した経路を撮影するように、車両位置情報の履歴、および、航空機位置情報に基づいて飛行し、撮影した画像を監視装置に送信する。
【選択図】図8
特許請求の範囲
【請求項1】
直進工程と旋回工程とを繰り返して往復走行しつつ、作業を行う複数の作業車両と、
カメラを有し、前記複数の作業車両の周囲を飛行可能な無人航空機と、
前記複数の作業車両、および、前記無人航空機と通信する監視装置と
を備え、
前記作業車両は、自己の車両位置情報を検出する第1測位装置を備え、
前記無人航空機は、自己の航空機位置情報を検出する第2測位装置を備え、
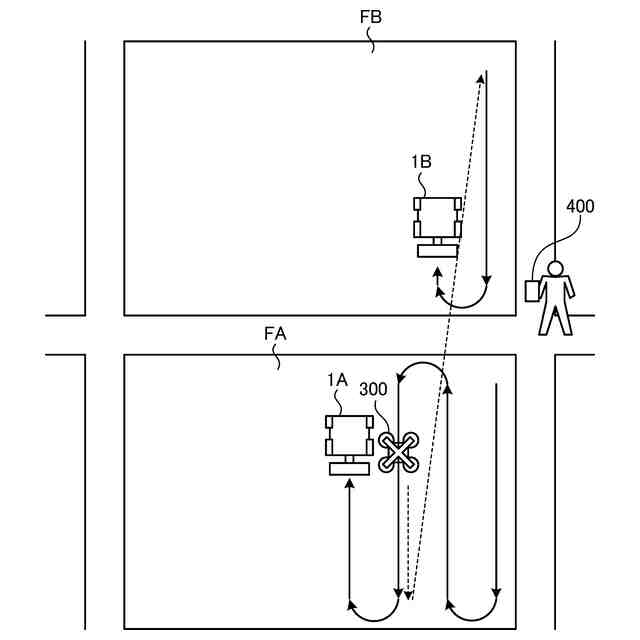
前記無人航空機は、前記作業車両による直進工程が終了した場合に、直進工程が終了した経路を撮影するように、前記車両位置情報の履歴、および、航空機位置情報に基づいて飛行し、撮影した画像を前記監視装置に送信する、作業管理システム。
続きを表示(約 280 文字)
【請求項2】
前記監視装置は、前記無人航空機によって撮影された画像によって前記直進工程に残耕が検出された場合、前記残耕に関する報知信号を端末装置に送信する、請求項1に記載の作業管理システム。
【請求項3】
前記無人航空機は、第1の作業車両における直進工程が終了した経路を撮影した後に、第2の作業車両における直進工程が終了した経路を撮影するように移動する、請求項1に記載の作業管理システム。
【請求項4】
前記無人航空機は、撮影対象となる直進工程が無い場合、充電基地に戻って充電する、請求項1に記載の作業管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業管理システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、作業車両に対して所定の相対位置を飛行し、相対位置に応じてカメラの撮影方向を制御する無人飛行機を有する作業管理システムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第7006449号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記技術では、複数の作業車両を管理する場合、作業車両と同数の無人飛行機を飛行させる必要がある。また、複数の作業車両を監視する場合、無人飛行機を適切なタイミングで適切な場所に手動操作によって飛行させることが困難である。
【0005】
本発明は、上記に鑑みてなされたものであって、無人飛行機を適切に飛行させ、かつ、無人飛行機による監視を容易にする作業管理システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
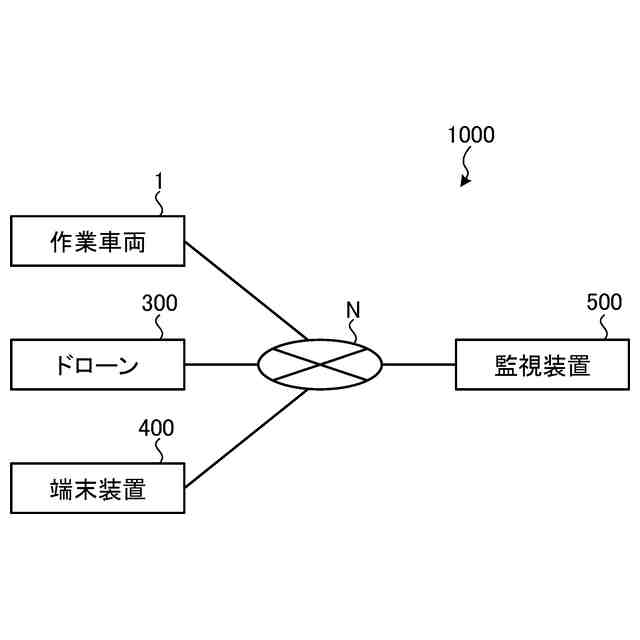
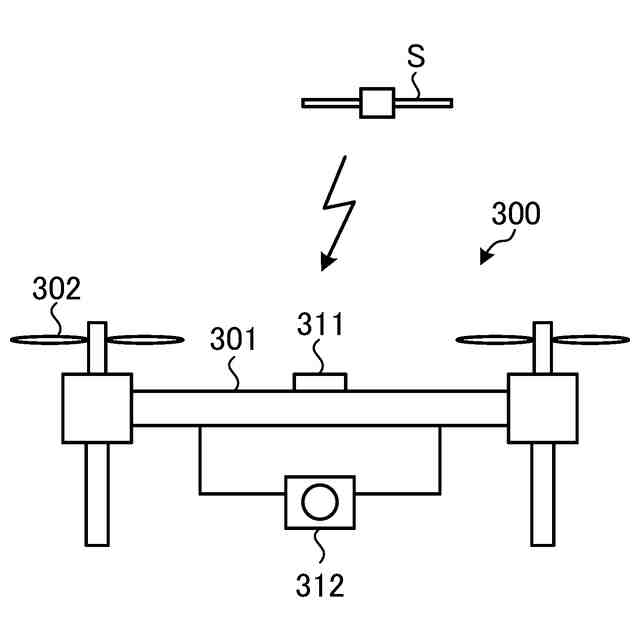
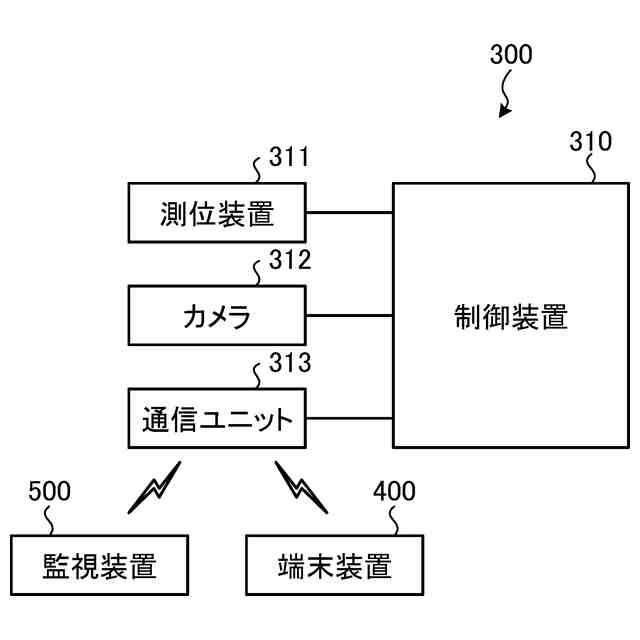
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業管理システム(1000)は、直進工程と旋回工程とを繰り返して往復走行しつつ、作業を行う複数の作業車両(1)と、カメラ(312)を有し、複数の作業車両(1)の周囲を飛行可能な無人航空機(300)と、複数の作業車両(1)、および、無人航空機(300)と通信する監視装置(400)とを備える。作業車両(1)は、自己の車両位置情報を検出する第1測位装置(150)を備える。無人航空機(300)は、自己の航空機位置情報を検出する第2測位装置(311)を備える。無人航空機(300)は、作業車両による直進工程が終了した場合に、直進工程が終了した経路を撮影するように、車両位置情報の履歴、および、航空機位置情報に基づいて飛行し、撮影した画像を監視装置(500)に送信する。
【発明の効果】
【0007】
実施形態の一態様によれば、無人飛行機を適切に飛行させ、かつ、無人飛行機による監視を容易にすることができる。
【図面の簡単な説明】
【0008】
図1は、実施形態に係る作業管理システムを示す概略図である。
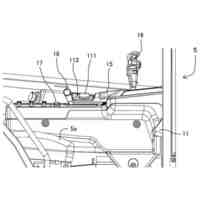
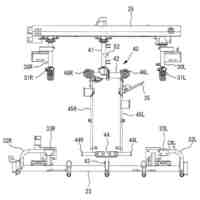
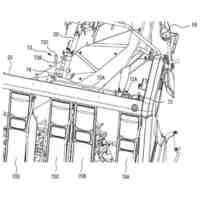
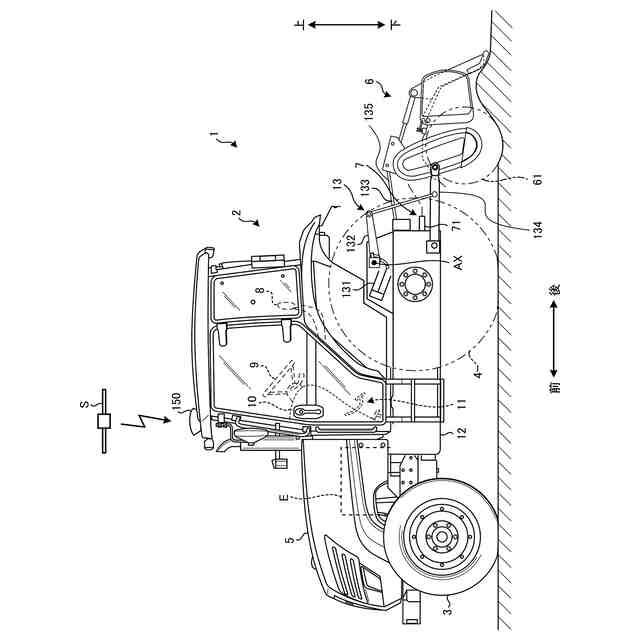
図2は、実施形態に係る作業車両を示す概略左側面図である。
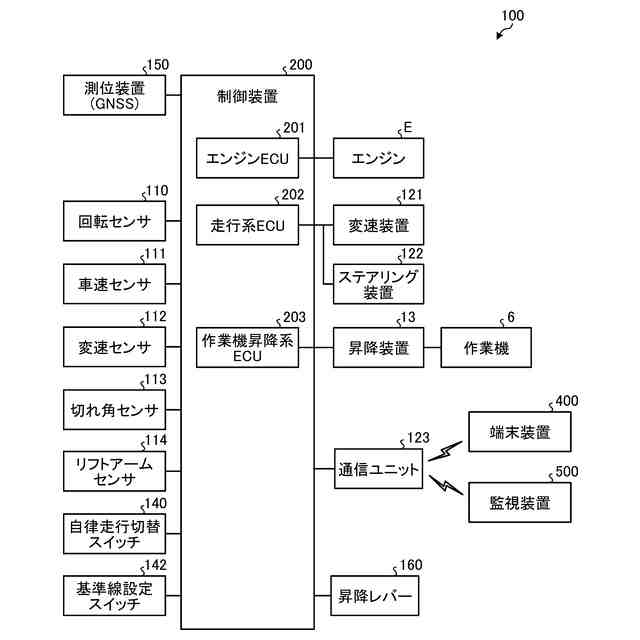
図3は、実施形態に係る作業車両の制御システムを示すブロック図である。
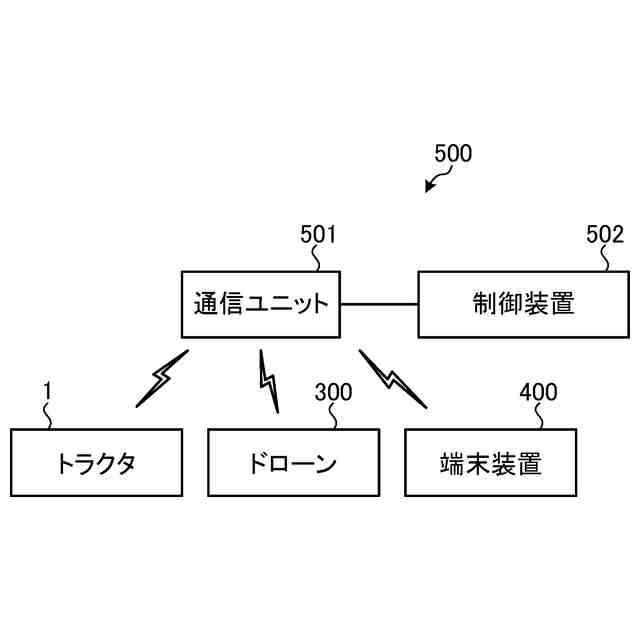
図4は、実施形態に係る監視装置を示すブロック図である。
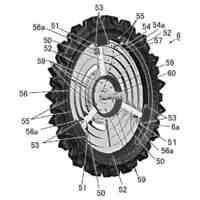
図5は、実施形態に係るドローンを示す概略図である。
図6は、実施形態に係るドローンの制御系を示すブロック図である。
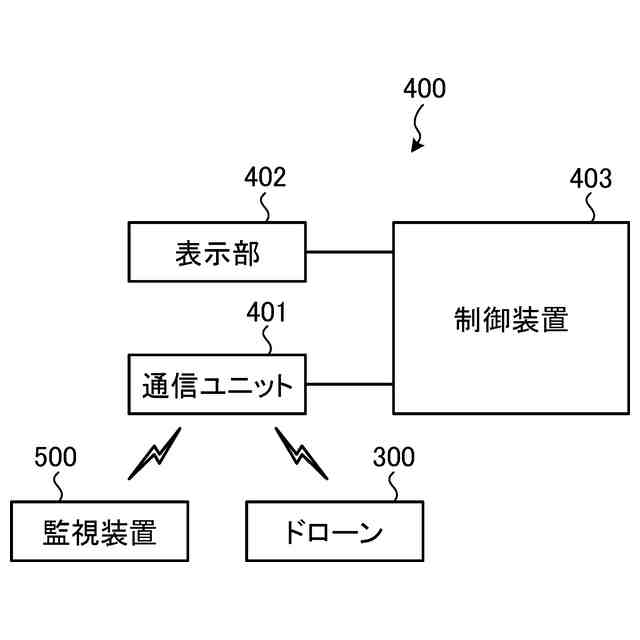
図7は、実施形態に係る端末装置を示すブロック図である。
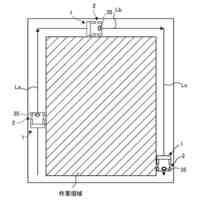
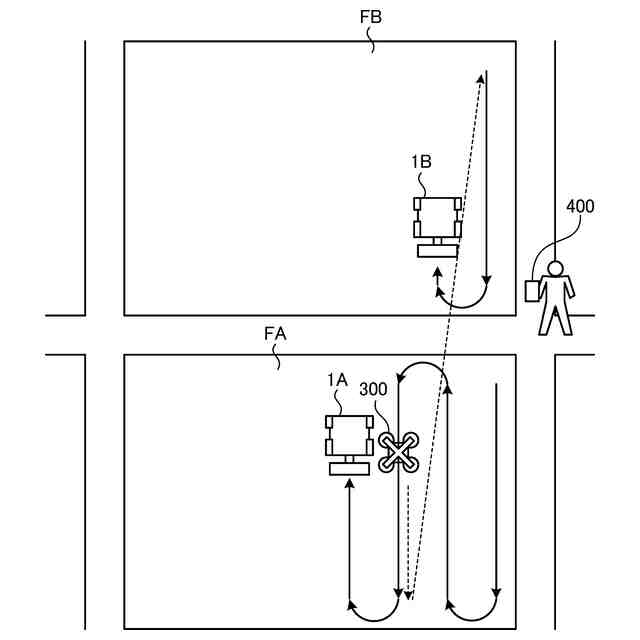
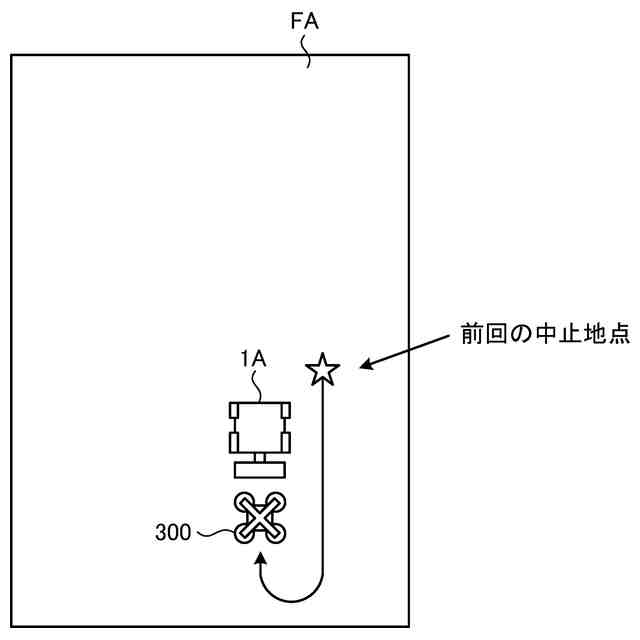
図8は、ドローンの飛行経路を説明する図である。
図9は、ドローンの飛行を説明する図である。
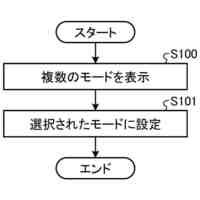
図10は、実施形態に係る飛行経路設定処理を説明するフローチャートである。
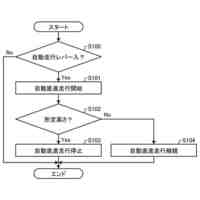
図11は、実施形態に係る飛行処理を説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
まず、図1を参照して実施形態に係る作業管理システムの概要について説明する。図1は、実施形態に係る作業管理システムを示す概略図である。作業管理システムは、圃場における作業車両の作業を管理するシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
1日前
井関農機株式会社
収穫機
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
コンバイン
9日前
井関農機株式会社
コンバイン
9日前
井関農機株式会社
ロボット作業車両
3日前
井関農機株式会社
作業車両
23日前
個人
方向検出器
1か月前
積水樹脂株式会社
磁性シート
3か月前
ugo株式会社
移動体
1か月前
個人
車両レバー操作装置
3か月前
村田機械株式会社
産業機械
1日前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
移動体
1か月前
神港テクノス株式会社
制御装置
1か月前
エイブリック株式会社
基準電圧回路装置
3か月前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
自律移動体
1日前
トヨタ自動車株式会社
搬送システム
2か月前
株式会社熊谷組
巡回ルート作成装置
3か月前
トヨタ自動車株式会社
搬送ロボット
2か月前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
1日前
アズビル株式会社
パラメータ調整装置
10日前
株式会社フジキン
流体制御装置
1か月前
株式会社明電舎
車両
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ