TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024162579
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023078226
出願日
2023-05-10
発明の名称
移動体
出願人
ugo株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241114BHJP(制御;調整)
要約
【課題】延伸機構を少なくとも上方に延伸させるフレキシブルラックを採用した場合に、移動体を揺れにくくすることができる移動体を提供する。
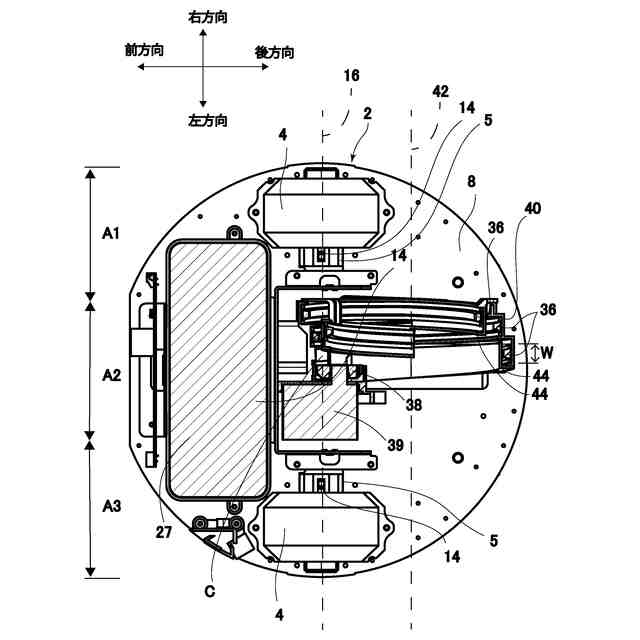
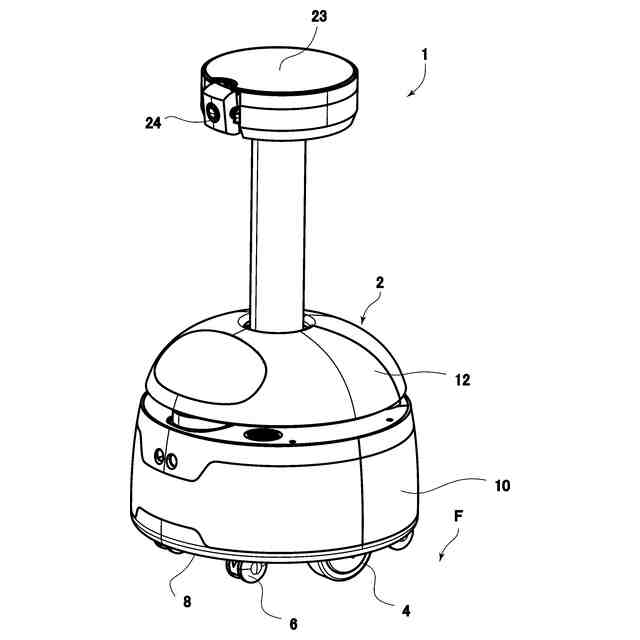
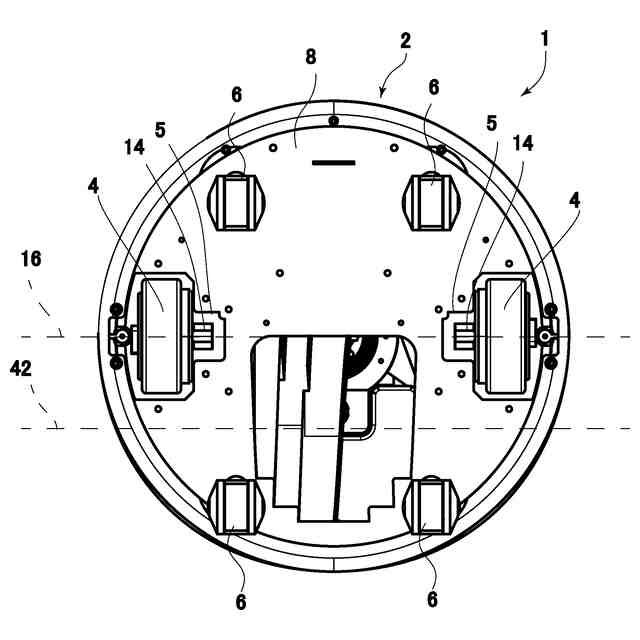
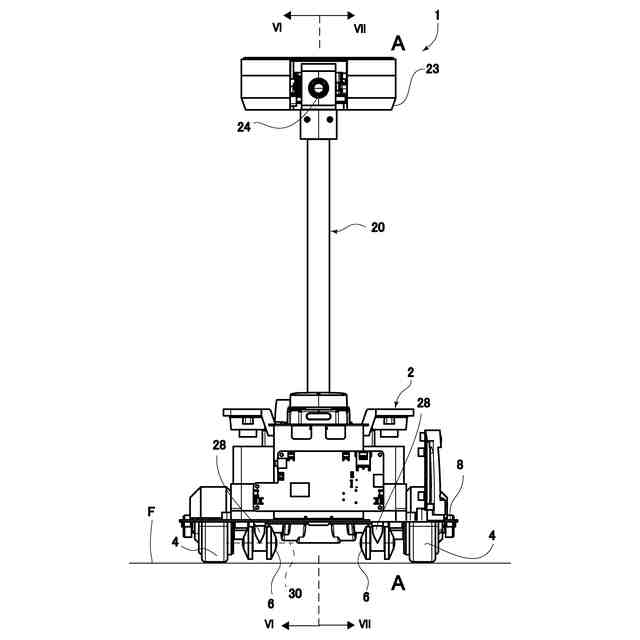
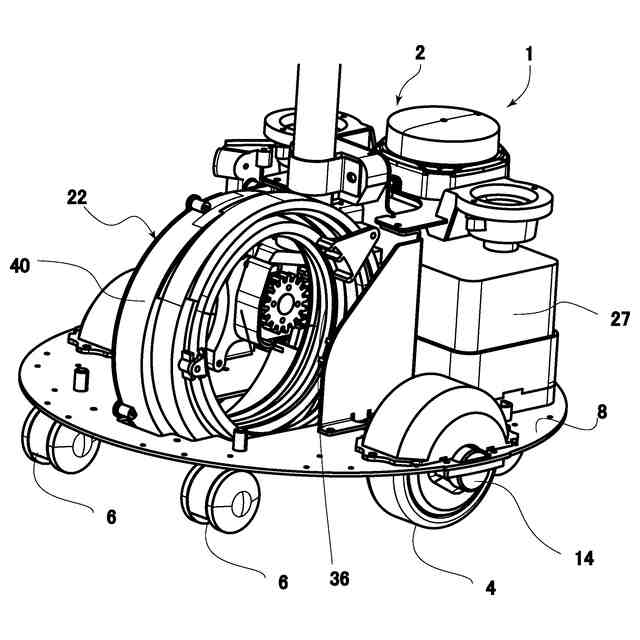
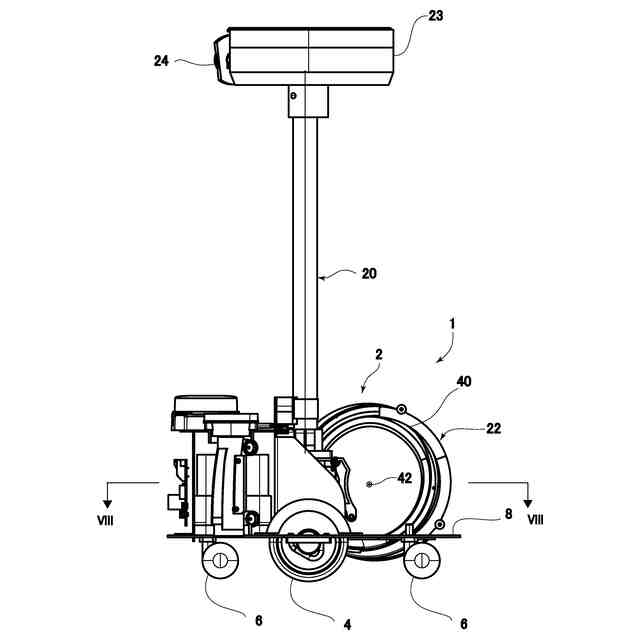
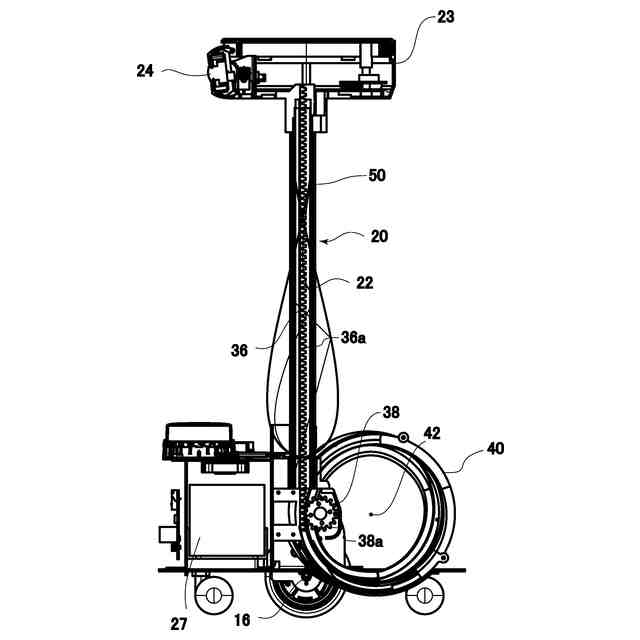
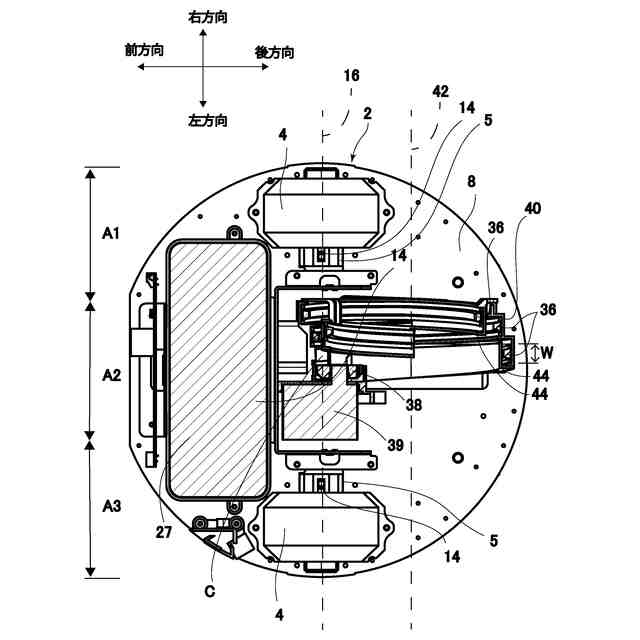
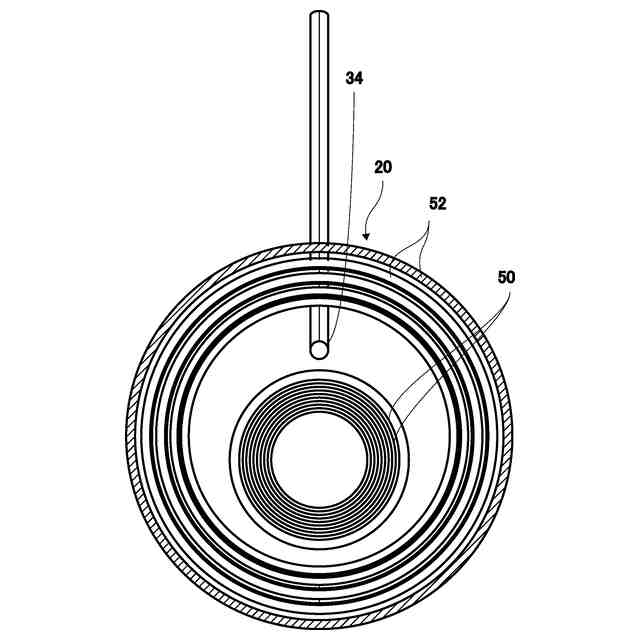
【解決手段】本発明の移動体は、移動体本体2と、所定方向の回転中心軸線を中心にして回転する2つ以上の駆動輪4と、少なくとも上方に延伸可能な延伸機構20と、延伸機構を少なくとも上方に延伸させる駆動部22と、延伸機構の上部に配置されると共に外部環境を検知可能な検知装置24とを有し、駆動部22は、延伸機構を少なくとも上方に延伸させると共に、可撓性を有するフレキシブルラック36と、フレキシブルラックの歯と噛み合うように構成されたピニオン38と、ピニオンの回転により移動されるフレキシブルラックを螺旋状に収納できるように構成された収納部40とを備え、駆動輪の回転中心軸線16と、収納部の中心軸線42とが平行方向に配置される。
【選択図】図8
特許請求の範囲
【請求項1】
移動可能な移動体であって、
移動体本体と、
前記移動体本体に取り付けられた、所定方向の回転中心軸線を中心にして回転する2つ以上の駆動輪と、
前記移動体本体から上方に向けて配置され且つ少なくとも上方に延伸可能な延伸機構と、
前記延伸機構を少なくとも上方に延伸させる駆動部と、
前記延伸機構の上部に配置されると共に外部環境を検知可能な検知装置とを有し、
前記駆動部は、
前記延伸機構を少なくとも上方に延伸させると共に、可撓性を有するフレキシブルラックと、
前記フレキシブルラックの歯と噛み合うように構成されたピニオンと、
前記ピニオンの回転により移動される前記フレキシブルラックを螺旋状に収納できるように構成された収納部とを備え、
前記駆動輪の前記回転中心軸線と、前記収納部の中心軸線とが平行方向に配置されることを特徴とする、移動体。
続きを表示(約 730 文字)
【請求項2】
前記延伸機構は、構成部材の一方が他方に重ねられる入れ子構造を形成している、請求項1に記載の移動体。
【請求項3】
前記収納部が縦方向に巻かれる螺旋状の内周壁を備える、請求項1に記載の移動体。
【請求項4】
前記収納部が、前記移動体本体の左右方向の中央領域に配置される、請求項3に記載の移動体。
【請求項5】
前記フレキシブルラックは、前記収納部において、外向きの螺旋の所定の位置から螺旋の向きを左右方向の中央側に向けて折り返すように収納される、請求項4に記載の移動体。
【請求項6】
前記延伸機構が、前記移動体本体の前後方向及び左右方向の中央領域に配置される、請求項1に記載の移動体。
【請求項7】
さらに、縦方向にケーブルを巻き取るケーブルリールであって、2つの前記駆動輪を結ぶ前記回転中心軸線と、前記ケーブルリールの中心軸線とが平行方向に配置される前記ケーブルリールを備える、請求項1に記載の移動体。
【請求項8】
前記駆動輪は、2つ以上の前記駆動輪のうち少なくとも一対の前記駆動輪を備え、前記移動体の前後方向の中心部は、一対の前記駆動輪を通る前記回転中心軸線上に位置する、請求項1に記載の移動体。
【請求項9】
前記ピニオンが、前記回転中心軸線上において一対の前記駆動輪の中間部に配置される、請求項8に記載の移動体。
【請求項10】
さらに、前記少なくとも2つ以上の前記駆動輪の取付位置よりも、前記移動体本体の前方向又は後方向の位置に取り付けられた、少なくとも1つ以上の車輪を備える、請求項1に記載の移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動可能な移動体に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、特許文献1に示すように、障害物を検知するためにセンサを備えた移動可能なロボットが知られている。
【先行技術文献】
【特許文献】
【0003】
特許第4256812号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示すようなロボットにおいて、外部環境を測定するセンサは、移動体の本体に設けられており、外部環境によっては外部環境の測定が不十分となる場合があるという問題があった。
本発明の発明者らは、このような課題を解決するため、検知装置を延伸機構に取付けて移動体の上方に向けて延伸させることを検討した。
【0005】
しかしながら、検討の過程において、移動体の延伸機構を上方に延伸させるためには、所定の長さのフレキシブルラックを備え且つ収納する必要があり、フレキシブルラックが移動することにより、フレキシブルラックの移動に伴って移動体全体の重心の位置が変わり、移動体が揺れやすくなるという問題が新たに生じることが分かった。さらにこのような問題は、延伸機構が、例えば1メートル以上等の比較的長い長さまで延伸する場合等には、移動体全体の重心の位置がより上方に移動し、移動体が揺れやすくなるため、移動体がより揺れやすくなるという問題も生じることが認識された。
【0006】
また、外部の環境に応じて、移動体の移動と合わせて、延伸機構を調整したいという要請がある場合がある。移動体の移動と合わせて、延伸機構を調整しようとするときには、フレキシブルラックの移動に伴って移動体全体の重心の位置が変わり、移動体がより揺れやすくなるという問題も生じる。
【0007】
本発明は、このような問題を解決するためになされたものであり、延伸機構を上方に延伸させるフレキシブルラックを採用した場合に、移動体を揺れにくくすることができる移動体を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、本発明の一実施形態によれば、移動可能な移動体であって、移動体本体と、前記移動体本体に取り付けられた、所定方向の回転中心軸線を中心にして回転する2つ以上の駆動輪と、前記移動体本体から上方に向けて配置され且つ少なくとも上方に延伸可能な延伸機構と、前記延伸機構を少なくとも上方に延伸させる駆動部と、前記延伸機構の上部に配置されると共に外部環境を検知可能な検知装置とを有し、前記駆動部は、前記延伸機構を少なくとも上方に延伸させると共に、可撓性を有するフレキシブルラックと、前記フレキシブルラックの歯と噛み合うように構成されたピニオンと、前記ピニオンの回転により移動される前記フレキシブルラックを螺旋状に収納できるように構成された収納部とを備え、前記駆動輪の回転中心軸線と、前記収納部の中心軸線とが平行方向に配置される。
このように構成された本発明の一実施形態によれば、前記駆動輪の回転中心軸線と、前記収納部の中心軸線とが平行方向に配置され、前記ピニオンの回転により移動される前記フレキシブルラックが収納部内において螺旋状に収納されるように移動され、延伸機構が少なくとも上方に延伸され、前記検知装置の高さ方向の位置が変化する。これにより、駆動輪の回転中心軸線と、収納部内の螺旋状のフレキシブルラックの中心軸線とが平行方向にでき、フレキシブルラックの移動に伴って移動体全体の重心の位置が変わったとしても、移動体の重心の位置の変化が駆動輪の回転中心軸線と平行方向を中心とした変化に抑制されやすくなり、移動体が揺れにくくすることができ、仮に揺れたとしても移動体の揺れの大きさを抑制できる。
【0009】
本発明の一実施形態によれば、好ましくは、前記延伸機構は、構成部材の一方が他方に重ねられる入れ子構造を形成している。
このように構成された本発明の一実施形態によれば、前記延伸機構は、構成部材の一方が他方に重ねられる入れ子構造を形成している。このような構成により、延伸機構は、比較的シンプルな構成として少なくとも上方に延伸できる。
【0010】
本発明の一実施形態によれば、好ましくは、前記収納部が縦方向に巻かれる螺旋状の前記内周壁を備える。
このように構成された本発明の一実施形態によれば、前記収納部が縦方向に巻かれる螺旋状の前記内周壁を形成する。これにより、移動体の重心を左右方向の中央に寄せやすくでき、フレキシブルラックが移動するときに、フレキシブルラックの移動に伴って移動体全体の重心の位置が変わったとしても、移動体が左右方向に揺れにくくすることができ、仮に揺れたとしても移動体の左右方向の揺れの大きさを抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ugo株式会社
移動体
7か月前
株式会社FUJI
工作機械
18日前
株式会社ダイヘン
移動体
23日前
ローム株式会社
半導体集積回路
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
18日前
株式会社オプトン
制御プログラム生成装置
16日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社鷺宮製作所
制御装置
17日前
キヤノン電子株式会社
加工装置、及び、制御方法
3日前
株式会社ダイフク
物品搬送設備
16日前
株式会社ダイフク
物品搬送設備
16日前
株式会社ダイヘン
負荷時タップ切換器
23日前
株式会社ダイフク
物品搬送設備
9日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
29日前
シンフォニアテクノロジー株式会社
異常検知装置
16日前
オムロン株式会社
安全装置
16日前
三菱電機株式会社
電源回路
3日前
WHILL株式会社
電動モビリティ
1か月前
株式会社計数技研
移動体、及びプログラム
1か月前
株式会社ダイフク
飛行体制御システム
5日前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社日立製作所
製造工程管理システム
17日前
株式会社豊田自動織機
無人搬送車両
26日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
1か月前
株式会社大林組
作業機械の自動運転制御システム
1か月前
株式会社FUJI
工作機械
19日前
株式会社東芝
監視制御システム及び監視制御方法
4日前
オークラ輸送機株式会社
走行車および自律走行方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ