TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025006588
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107481
出願日
2023-06-29
発明の名称
産業機械
出願人
村田機械株式会社
代理人
個人
主分類
G05B
19/4155 20060101AFI20250109BHJP(制御;調整)
要約
【課題】既知のスキップ機能を利用した制御は、スキップ座標を決定するまでに時間がかかる。
【解決手段】制御装置は、外部からの信号によって、マシンプログラムにおける実行中のブロックを中断し、次のブロックを実行するスキップ機能を有する。制御装置は、第1ブロックの実行中に被検出体に前記タッチスイッチが接触してタッチスイッチから出力される信号が変化すると、第1ブロックを中断して第2ブロックを実行する。制御装置は、第2ブロックの実行中にタッチスイッチから出力される信号が元に戻ると、第2ブロックを中断する。制御装置は、タッチスイッチから出力される信号が元に戻ったときの、タッチスイッチと被検出体との接触位置をスキップ座標として決定する。
【選択図】図3
特許請求の範囲
【請求項1】
オートメーション化された工程を受け持つ産業機械であって、
複数のブロックを含むマシンプログラムを実行可能な制御装置を備え、
前記マシンプログラムは、
被検出体に向かう第1方向に、前記被検出体の位置を検出するためのタッチスイッチを移動させる命令を含む第1ブロックと、
前記タッチスイッチの移動を停止させて、前記第1方向とは反対方向の第2方向に前記タッチスイッチを移動させる命令を含む第2ブロックと、を含み、
前記制御装置は、
外部からの信号によって、前記マシンプログラムにおける実行中のブロックを中断し、次のブロックを実行するスキップ機能を有し、
前記第1ブロックの実行中に前記被検出体に前記タッチスイッチが接触して前記タッチスイッチから出力される信号が変化すると、前記第1ブロックを中断して前記第2ブロックを実行し、
前記第2ブロックの実行中に前記タッチスイッチから出力される信号が元に戻ると、前記第2ブロックを中断し、
前記タッチスイッチから出力される信号が元に戻ったときの、前記タッチスイッチと前記被検出体との接触位置をスキップ座標として決定する、産業機械。
続きを表示(約 1,300 文字)
【請求項2】
オートメーション化された工程を受け持つ産業機械であって、
複数のブロックを含むマシンプログラムを実行可能な制御装置を備え、
前記マシンプログラムは、
被検出体の位置を検出するためのタッチスイッチに向かう第1方向に、前記被検出体を移動させる命令を含む第1ブロックと、
前記被検出体の移動を停止させて、前記第1方向とは反対方向の第2方向に前記被検出体を移動させる命令を含む第2ブロックと、を含み、
前記制御装置は、
外部からの信号によって、前記マシンプログラムにおける実行中のブロックを中断し、次のブロックを実行するスキップ機能を有し、
前記第1ブロックの実行中に前記タッチスイッチに前記被検出体が接触して前記タッチスイッチから出力される信号が変化すると、前記第1ブロックを中断して前記第2ブロックを実行し、
前記第2ブロックの実行中に前記タッチスイッチから出力される信号が元に戻ると、前記第2ブロックを中断し、
前記タッチスイッチから出力される信号が元に戻ったときの、前記タッチスイッチと前記被検出体との接触位置をスキップ座標として決定する、産業機械。
【請求項3】
前記制御装置は、
第1モードと第2モードとのいずれか一方の動作モードで動作可能であり、
前記第1モードで動作するときには、前記タッチスイッチから出力される信号が第1状態から第2状態に変化したときに前記スキップ機能を実行し、
前記第2モードで動作するときには、前記タッチスイッチから出力される信号が前記第2状態から前記第1状態に戻ったときに前記スキップ機能を実行し、
前記第1モードで動作しているときに前記スキップ機能を実行すると、前記動作モードを前記第1モードから前記第2モードに切り替える、請求項1又は請求項2に記載の産業機械。
【請求項4】
前記第1ブロックは、第1速度で前記タッチスイッチを移動させる命令を含み、
前記第2ブロックは、前記第1速度よりも遅い第2速度で前記タッチスイッチを移動させる命令を含む、請求項1に記載の産業機械。
【請求項5】
前記マシンプログラムは、前記第2速度よりも速い第3速度で前記第2方向に前記タッチスイッチを移動させる命令を含む第3ブロックを含み、
前記制御装置は、前記第2ブロックの実行中に前記タッチスイッチから出力される信号が元に戻ると、前記第2ブロックを中断して前記第3ブロックを実行する、請求項4に記載の産業機械。
【請求項6】
前記第1ブロックは、第1速度で前記被検出体を移動させる命令を含み、
前記第2ブロックは、前記第1速度よりも遅い第2速度で前記被検出体を移動させる命令を含む、請求項2に記載の産業機械。
【請求項7】
前記マシンプログラムは、前記第2速度よりも速い第3速度で前記第2方向に前記被検出体を移動させる命令を含む第3ブロックを含み、
前記制御装置は、前記第2ブロックの実行中に前記タッチスイッチから出力される信号が元に戻ると、前記第2ブロックを中断して前記第3ブロックを実行する、請求項6に記載の産業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業機械に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
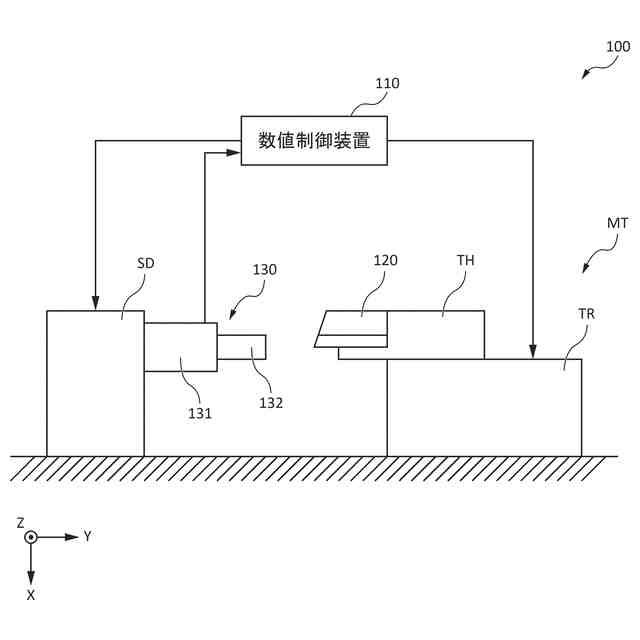
工作機械では、タッチスイッチを用いて、ツールやワークの位置を正確に把握することがある(例えば、特許文献1参照)。ツールやワーク等の被検出体の位置決めは、タッチスイッチ又は被検出体を移動させ、タッチスイッチに被検出体が接触することによりタッチスイッチから出力される信号を利用して行われる。タッチスイッチ又は被検出体を移動させる制御は、例えば、数値制御装置が有するスキップ機能を利用して実行される。
【0003】
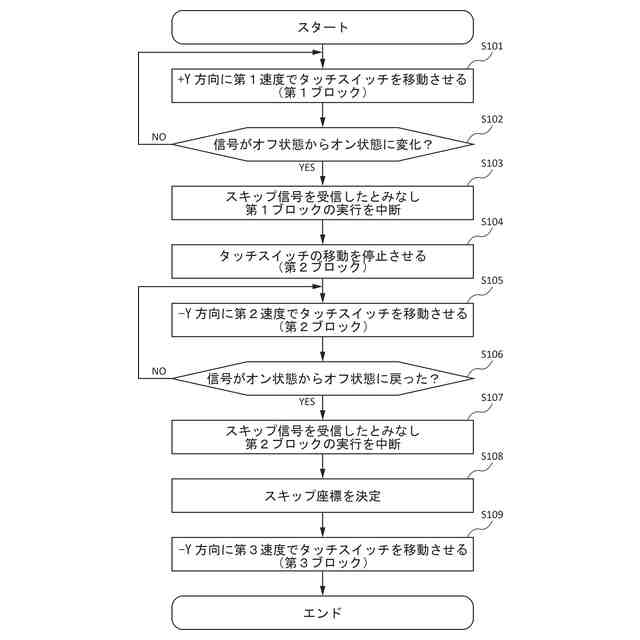
例えば、タッチスイッチは、被検出体に対向して配置される。そして、例えば、数値制御装置は、被検出体に向かう第1方向にタッチスイッチを第1速度で移動させる。被検出体にタッチスイッチが接触すると、タッチスイッチから出力される信号は、オフ状態からオン状態に変化する。数値制御装置は、タッチスイッチから出力される信号がオフ状態からオン状態に変化すると、スキップ信号が出力されたとみなし実行中の制御を中断し、タッチスイッチの移動を停止させる制御を実行する。数値制御装置は、スキップ信号が出力されたときの、タッチスイッチと被検出体との接触位置をスキップ座標として記憶する。タッチスイッチは、むだ時間に起因して停止するまでに距離を要するため、コンタクトが押し込まれた状態で停止する。
【0004】
そして、数値制御装置は、第1方向とは反対方向の第2方向におけるスキップ座標よりも先の特定位置までタッチスイッチを第1速度で移動させる。第2方向に移動する過程でタッチスイッチから出力される信号は、例えば、オン状態からオフ状態に戻る。しかし、数値制御装置は、タッチスイッチから出力される信号が戻っても、スキップ信号が出力されたとはみなさない。特定位置までタッチスイッチが移動すると、数値制御装置は、第1速度よりも遅い第2速度で第1方向にタッチスイッチを移動させる。被検出体にタッチスイッチが接触すると、タッチスイッチから出力される信号は、オフ状態からオン状態に変化する。数値制御装置は、タッチスイッチから出力される信号がオフ状態からオン状態に変化すると、スキップ信号が出力されたとみなし実行中の制御を中断する。数値制御装置は、スキップ信号が出力されたときの、タッチスイッチと被検出体との接触位置をスキップ座標として決定する。
【先行技術文献】
【特許文献】
【0005】
特許第3577887号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
既知のスキップ機能を利用した制御は、スキップ座標を決定するまでに時間がかかる。
【課題を解決するための手段】
【0007】
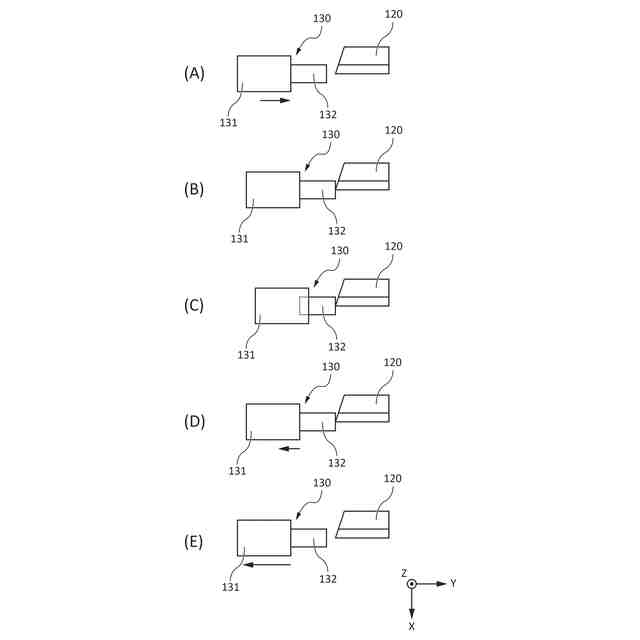
本発明の第1態様は、オートメーション化された工程を受け持つ産業機械である。産業機械は、複数のブロックを含むマシンプログラムを実行可能な制御装置を備える。マシンプログラムは、被検出体に向かう第1方向に、被検出体の位置を検出するためのタッチスイッチを移動させる命令を含む第1ブロックを含む。マシンプログラムは、タッチスイッチの移動を停止させて、第1方向とは反対方向の第2方向にタッチスイッチを移動させる命令を含む第2ブロックを含む。制御装置は、外部からの信号によって、マシンプログラムにおける実行中のブロックを中断し、次のブロックを実行するスキップ機能を有する。制御装置は、第1ブロックの実行中に被検出体に前記タッチスイッチが接触してタッチスイッチから出力される信号が変化すると、第1ブロックを中断して第2ブロックを実行する。制御装置は、第2ブロックの実行中にタッチスイッチから出力される信号が元に戻ると、第2ブロックを中断する。制御装置は、タッチスイッチから出力される信号が元に戻ったときの、タッチスイッチと被検出体との接触位置をスキップ座標として決定する。
【0008】
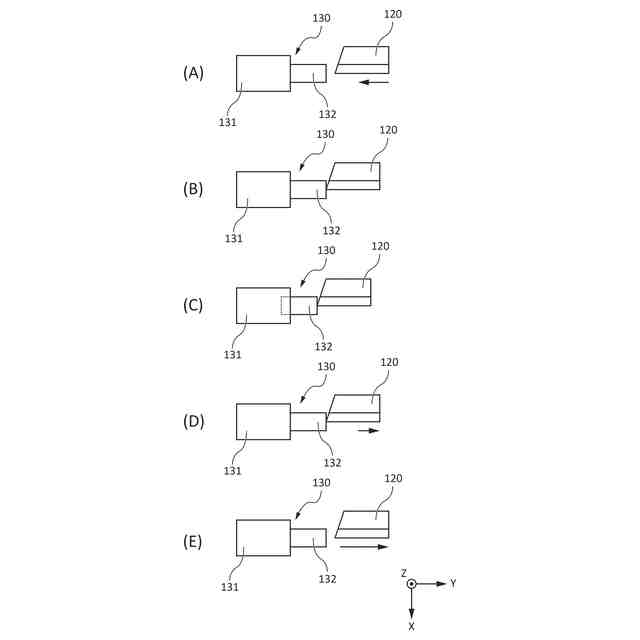
本発明の第2態様は、オートメーション化された工程を受け持つ産業機械である。産業機械は、複数のブロックを含むマシンプログラムを実行可能な制御装置を備える。マシンプログラムは、被検出体の位置を検出するためのタッチスイッチに向かう第1方向に、被検出体を移動させる命令を含む第1ブロックを含む。マシンプログラムは、被検出体の移動を停止させて、第1方向とは反対方向の第2方向に被検出体を移動させる命令を含む第2ブロックを含む。制御装置は、外部からの信号によって、マシンプログラムにおける実行中のブロックを中断し、次のブロックを実行するスキップ機能を有する。制御装置は、第1ブロックの実行中にタッチスイッチに被検出体が接触してタッチスイッチから出力される信号が変化すると、第1ブロックを中断して第2ブロックを実行する。制御装置は、第2ブロックの実行中にタッチスイッチから出力される信号が元に戻ると、第2ブロックを中断する。制御装置は、タッチスイッチから出力される信号が元に戻ったときの、タッチスイッチと被検出体との接触位置をスキップ座標として決定する。
【発明の効果】
【0009】
上記の態様によれば、産業機械は、スキップ座標を決定するための時間を短縮できる。
【0010】
上記の第1態様及び第2態様において、制御装置は、第1モードと第2モードとのいずれか一方の動作モードで動作可能であってよい。制御装置は、第1モードで動作するときには、タッチスイッチから出力される信号が第1状態から第2状態に変化したときにスキップ機能を実行してよい。制御装置は、第2モードで動作するときには、タッチスイッチから出力される信号が第2状態から第1状態に戻ったときにスキップ機能を実行してよい。制御装置は、第1モードで動作しているときにスキップ機能を実行すると、動作モードを第1モードから第2モードに切り替えてよい。この態様によれば、産業機械は、第1ブロックの実行中に、信号が第2状態から第1状態に戻る誤作動に起因してスキップ機能が実行されることを防止できる。また、産業機械は、第2ブロックの実行中に、信号が第1状態から第2状態に変化する誤作動に起因してスキップ機能が実行されることを防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
18日前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
12日前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
2日前
株式会社デンソー
診断装置
16日前
井関農機株式会社
作業車両
26日前
ローム株式会社
バイアス回路
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
12日前
株式会社アイシン
自律移動体
2日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
2日前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ


































