TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001166
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100610
出願日
2023-06-20
発明の名称
パラメータ調整装置
出願人
アズビル株式会社
代理人
個人
主分類
G05B
13/02 20060101AFI20241225BHJP(制御;調整)
要約
【課題】カスケード制御装置のパラメータ調整時間を短縮する。
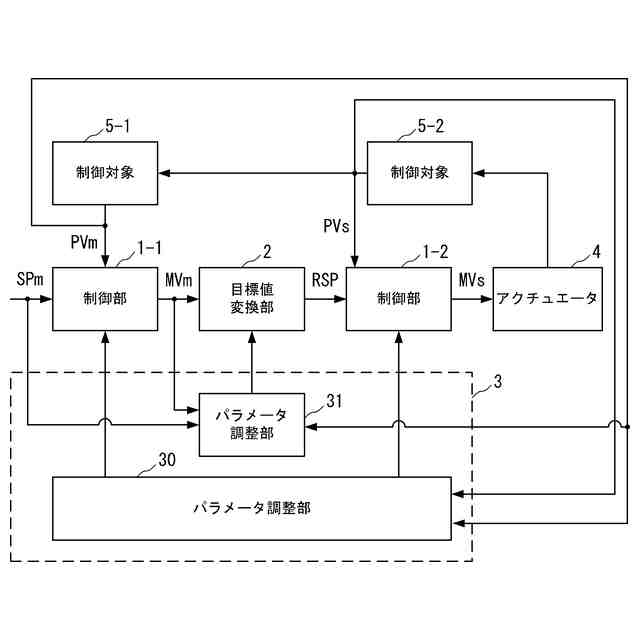
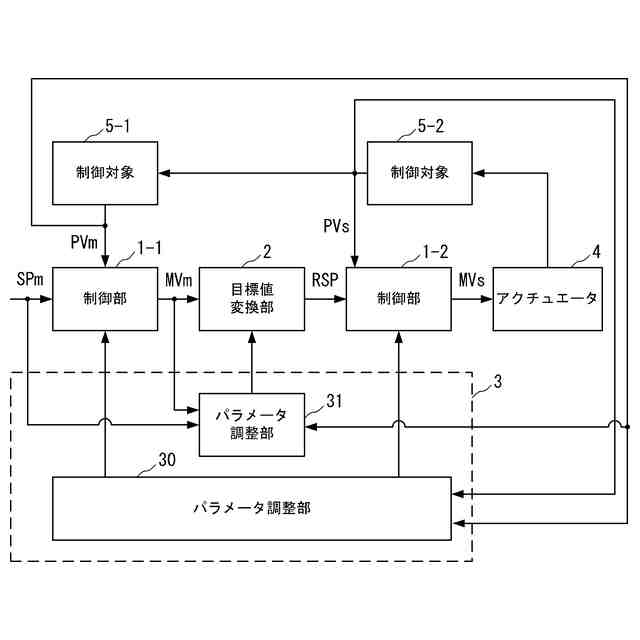
【解決手段】パラメータ調整装置3は、マスター側制御部1-1とスレーブ側制御部1-2とを含むカスケード制御装置におけるスレーブ側の目標値RSPをマスター側の操作量MVmから算出するためのスケーリング下限値とスケーリング上限値を調整する。パラメータ調整装置3は、カスケード制御中に制御量PVmが目標値SPmと異なる値で整定しているときに、制御量PVmが目標値SPmで整定しているときの既知のスレーブ側の制御量PVs=PVaと、カスケード制御中にマスター側制御部1-1から出力された操作量MVmとに基づいて、スケーリング下限値とスケーリング上限値のうち少なくとも一方を、制御量PVmが目標値SPmで整定するまで変更するパラメータ調整部31を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
マスター側制御部とスレーブ側制御部とが縦続接続されたカスケード制御装置におけるスレーブ側の目標値をマスター側の操作量から算出するためのスケーリング下限値とスケーリング上限値とを調整するパラメータ調整装置であって、
カスケード制御中にマスター側の制御量がマスター側の目標値と異なる値で整定しているときに、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量と、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量とに基づいて、前記スケーリング下限値と前記スケーリング上限値のうち少なくとも一方を、前記マスター側の制御量が前記マスター側の目標値で整定するまで動的に変更するように構成された第1のパラメータ調整部を備えることを特徴とするパラメータ調整装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1記載のパラメータ調整装置において、
前記第1のパラメータ調整部は、カスケード制御の開始前に前記スケーリング下限値の初期値と前記スケーリング上限値の初期値とを設定し、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量と、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量と、前記スケーリング下限値の初期値または前記スケーリング下限値の前回の値とに基づいて、前記スケーリング上限値を変更することと、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量と、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量と、前記スケーリング上限値の初期値または前記スケーリング上限値の前回の値とに基づいて、前記スケーリング下限値を変更することのうち、少なくとも一方を行うことを特徴とするパラメータ調整装置。
【請求項3】
請求項2記載のパラメータ調整装置において、
前記第1のパラメータ調整部は、変更後のスケーリング上限値SHを算出する際には、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量をPVa、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量をMVm、前記スケーリング下限値の初期値または前記スケーリング下限値の前回の値をSLとしたとき、SH={PVa-SL+(MVm/100)×SL}/(MVm/100)により変更後のスケーリング上限値SHを算出し、変更後のスケーリング下限値SLを算出する際には、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量をPVa、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量をMVm、前記スケーリング上限値の初期値または前記スケーリング上限値の前回の値をSHとしたとき、SL={PVa-(MVm/100)×SH}/{-(MVm/100)+1}により変更後のスケーリング下限値SLを算出することを特徴とするパラメータ調整装置。
【請求項4】
請求項1記載のパラメータ調整装置において、
前記カスケード制御装置は、
前記マスター側の制御量と前記マスター側の目標値とに基づいて前記マスター側の操作量を算出するように構成された前記マスター側制御部と、
前記スレーブ側の制御量と前記スレーブ側の目標値とに基づいてスレーブ側の操作量を算出して制御対象に出力するように構成された前記スレーブ側制御部と、
前記マスター側制御部と前記スレーブ側制御部との間に設けられ、前記マスター側の操作量を前記スケーリング下限値と前記スケーリング上限値とに基づいて前記スレーブ側の目標値に変換するように構成された目標値変換部とから構成されることを特徴とするパラメータ調整装置。
【請求項5】
請求項4記載のパラメータ調整装置において、
前記目標値変換部は、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量をMVm、前記スケーリング下限値をSL、前記スケーリング上限値をSHとしたとき、RSP=(MVm/100)×(SH-SL)+SLにより前記スレーブ側の目標値RSPを算出することを特徴とするパラメータ調整装置。
【請求項6】
請求項1記載のパラメータ調整装置において、
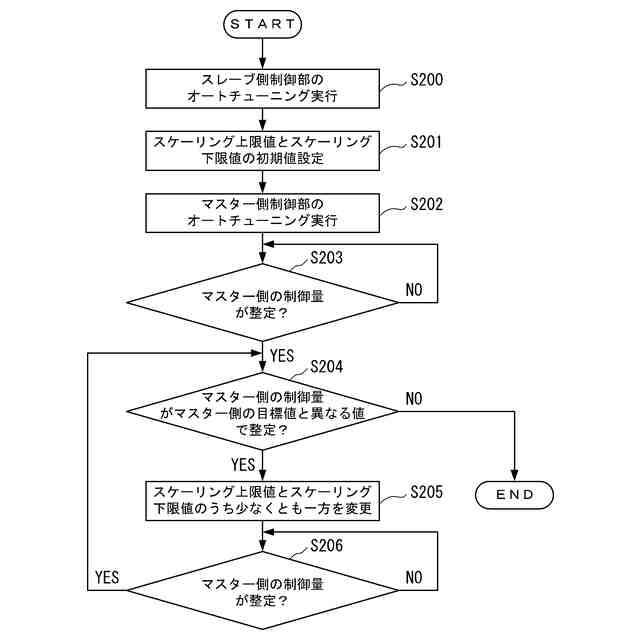
カスケード制御の開始前に前記スレーブ側制御部のオートチューニングを実行したときの前記スレーブ側の制御量の応答に基づいて前記スレーブ側制御部のPIDパラメータを算出して設定し、前記マスター側制御部のオートチューニングを実行したときの前記マスター側の制御量の応答に基づいて前記マスター側制御部のPIDパラメータを算出して設定するように構成された第2のパラメータ調整部をさらに備えることを特徴とするパラメータ調整装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の制御部が縦続接続されたカスケード制御装置のパラメータを調整するパラメータ調整装置に関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
制御系における外乱応答性を改善するため、またハンチングを小さくするために、カスケード制御という制御方式が知られている(特許文献1参照)。カスケード制御は、半導体拡散炉の制御など、様々な場面で導入されている。
【0003】
カスケード制御においては、2つの制御部(調節計)のPIDパラメータ調整に加えて、カスケード制御固有のパラメータであるスケーリング上限値とスケーリング下限値の調整が必要である。スケーリング上限値とスケーリング下限値の調整のために、例えば温度制御系の場合には稼働→冷却のサイクルを2、3回繰り返す必要がある。そのため、制御開始までのパラメータ調整に多くの時間と人手を要するという課題があった。
【先行技術文献】
【特許文献】
【0004】
特開2022-34357号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記課題を解決するためになされたもので、カスケード制御装置のパラメータ調整時間を短縮することができるパラメータ調整装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、マスター側制御部とスレーブ側制御部とが縦続接続されたカスケード制御装置におけるスレーブ側の目標値をマスター側の操作量から算出するためのスケーリング下限値とスケーリング上限値とを調整するパラメータ調整装置であって、
カスケード制御中にマスター側の制御量がマスター側の目標値と異なる値で整定しているときに、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量と、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量とに基づいて、前記スケーリング下限値と前記スケーリング上限値のうち少なくとも一方を、前記マスター側の制御量が前記マスター側の目標値で整定するまで動的に変更するように構成された第1のパラメータ調整部を備えることを特徴とするものである。
【0007】
また、本発明のパラメータ調整装置の1構成例において、前記第1のパラメータ調整部は、カスケード制御の開始前に前記スケーリング下限値の初期値と前記スケーリング上限値の初期値とを設定し、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量と、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量と、前記スケーリング下限値の初期値または前記スケーリング下限値の前回の値とに基づいて、前記スケーリング上限値を変更することと、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量と、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量と、前記スケーリング上限値の初期値または前記スケーリング上限値の前回の値とに基づいて、前記スケーリング下限値を変更することのうち、少なくとも一方を行うことを特徴とするものである。
【0008】
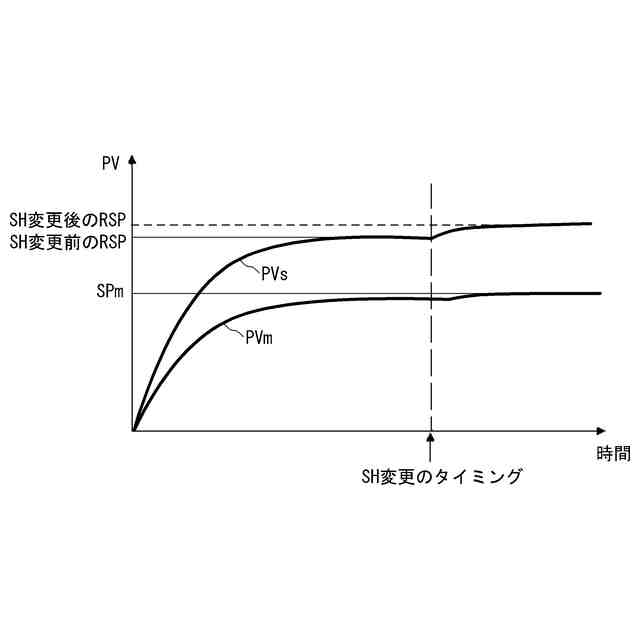
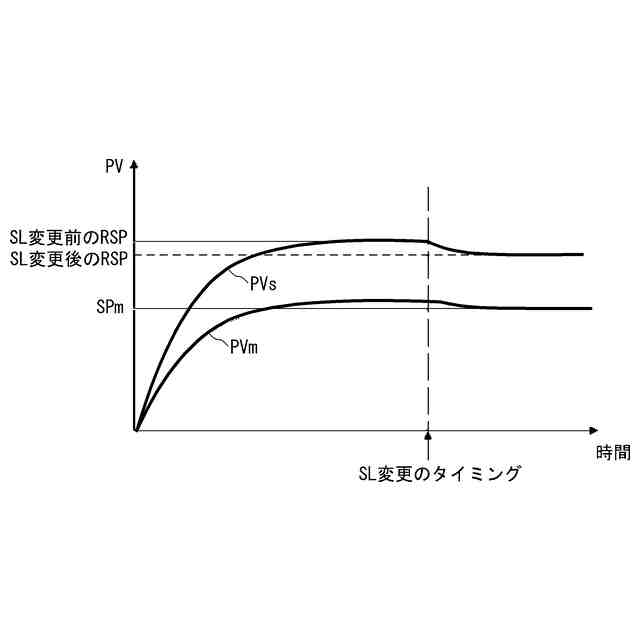
また、本発明のパラメータ調整装置の1構成例において、前記第1のパラメータ調整部は、変更後のスケーリング上限値SHを算出する際には、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量をPVa、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量をMVm、前記スケーリング下限値の初期値または前記スケーリング下限値の前回の値をSLとしたとき、SH={PVa-SL+(MVm/100)×SL}/(MVm/100)により変更後のスケーリング上限値SHを算出し、変更後のスケーリング下限値SLを算出する際には、前記マスター側の制御量が前記マスター側の目標値で整定しているときの既知のスレーブ側の制御量をPVa、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量をMVm、前記スケーリング上限値の初期値または前記スケーリング上限値の前回の値をSHとしたとき、SL={PVa-(MVm/100)×SH}/{-(MVm/100)+1}により変更後のスケーリング下限値SLを算出することを特徴とするものである。
【0009】
また、本発明のパラメータ調整装置の1構成例において、前記カスケード制御装置は、前記マスター側の制御量と前記マスター側の目標値とに基づいて前記マスター側の操作量を算出するように構成された前記マスター側制御部と、前記スレーブ側の制御量と前記スレーブ側の目標値とに基づいてスレーブ側の操作量を算出して制御対象に出力するように構成された前記スレーブ側制御部と、前記マスター側制御部と前記スレーブ側制御部との間に設けられ、前記マスター側の操作量を前記スケーリング下限値と前記スケーリング上限値とに基づいて前記スレーブ側の目標値に変換するように構成された目標値変換部とから構成されることを特徴とするものである。
また、本発明のパラメータ調整装置の1構成例において、前記目標値変換部は、前記カスケード制御中に前記マスター側制御部から出力されたマスター側の操作量をMVm、前記スケーリング下限値をSL、前記スケーリング上限値をSHとしたとき、RSP=(MVm/100)×(SH-SL)+SLにより前記スレーブ側の目標値RSPを算出することを特徴とするものである。
【0010】
また、本発明のパラメータ調整装置の1構成例は、カスケード制御の開始前に前記スレーブ側制御部のオートチューニングを実行したときの前記スレーブ側の制御量の応答に基づいて前記スレーブ側制御部のPIDパラメータを算出して設定し、前記マスター側制御部のオートチューニングを実行したときの前記マスター側の制御量の応答に基づいて前記マスター側制御部のPIDパラメータを算出して設定するように構成された第2のパラメータ調整部をさらに備えることを特徴とするものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
情報処理装置及びプログラム
22日前
アズビル株式会社
情報処理装置及びプログラム
22日前
アズビル株式会社
信号出力装置、及び、その生産方法
12日前
アズビル株式会社
画像監視装置および画像監視方法ならびに制御システム
25日前
株式会社三井住友銀行
支援システム、方法、およびプログラム
22日前
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
19日前
株式会社ダイフク
搬送車
19日前
ローム株式会社
半導体集積回路
24日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
4日前
株式会社ダイフク
物品搬送設備
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
2日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
井関農機株式会社
作業車両
12日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
ローム株式会社
バイアス回路
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ