TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024153328
公報種別
公開特許公報(A)
公開日
2024-10-29
出願番号
2023067146
出願日
2023-04-17
発明の名称
搬送システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241022BHJP(制御;調整)
要約
【課題】適切にワゴンを搬送することができる搬送システムを提供する。
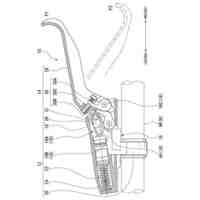
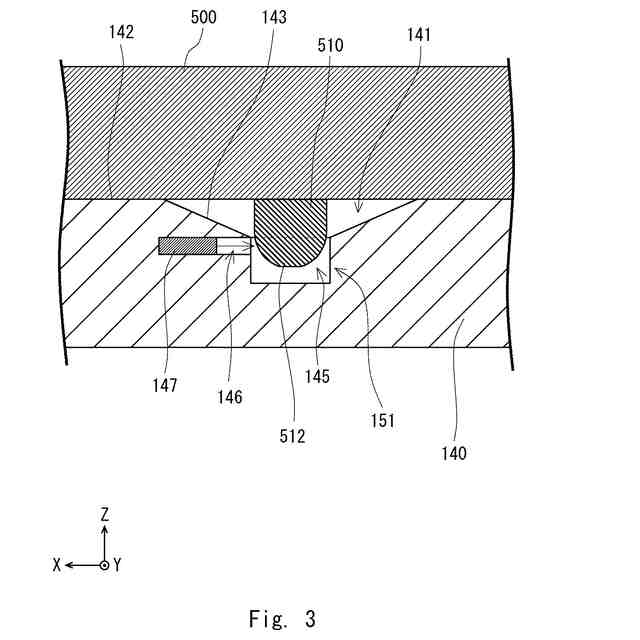
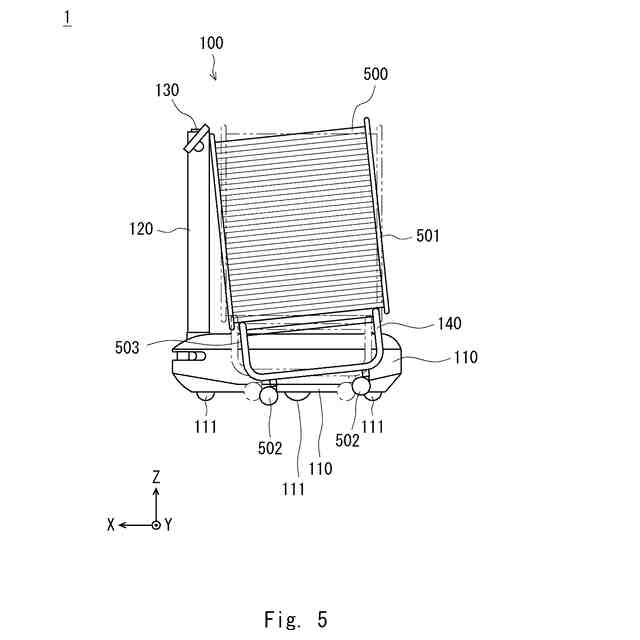
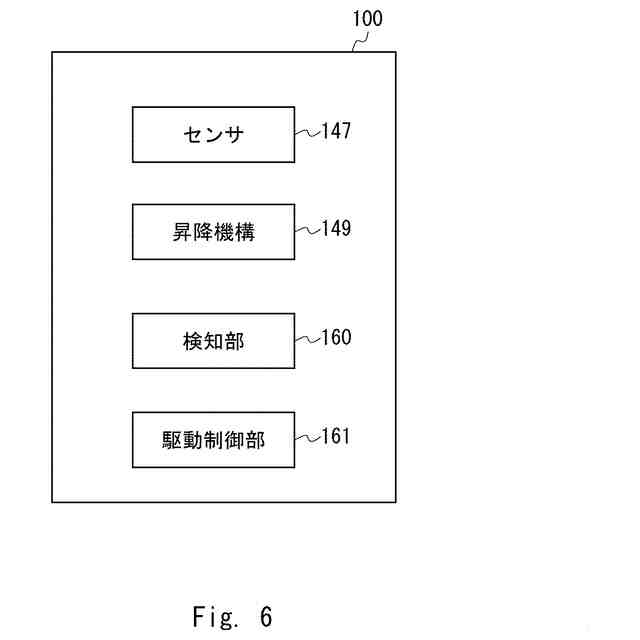
【解決手段】本実施形態にかかる搬送システムは、下方に向けて突出した複数の凸部を有するワゴン500を搭載して移動する移動ロボット100と、を備えた搬送システムであって、移動ロボットは、ワゴンが載置される載置面を有し、ワゴン500の下側に進入するステージと、ステージを昇降させる昇降機構149と、複数の凹部145と、凹部145の側面に設けられたセンサ147と、センサ147での検出結果に応じて、凸部が凹部145に挿入されていることを検知する検知部160と、を備えている。移動ロボット100は、ディープラーニングなどで生成された機械学習モデルを用いてもよい。
【選択図】図3
特許請求の範囲
【請求項1】
下方に向けて突出した複数の凸部を有するワゴンを搭載して移動する移動ロボット、を備えた搬送システムであって、
前記移動ロボットは、
前記ワゴンが載置される載置面を有し、前記ワゴンの下側に進入するステージと、
前記ワゴンの受け渡しを行うために、前記ステージを昇降させる昇降機構と、
複数の凸部に対応して設けられた複数の凹部と、
少なくとも一つの前記凹部の側面に設けられた光学センサと、
前記光学センサでの検出結果に応じて、前記凸部が前記凹部に挿入されていることを検知する検知部と、を備えた搬送システム。
続きを表示(約 510 文字)
【請求項2】
前記光学センサでの検出光量を閾値と比較して、挿入状態が正常か否かを判定する請求項1に記載の搬送システム。
【請求項3】
前記光学センサが、前記複数の凹部のうちの一部の凹部にのみ設けられている請求項1に記載の搬送システム。
【請求項4】
前記凸部の先端が曲面となっており、先端に行くほど小さくなっている請求項1、又は2に記載の搬送システム。
【請求項5】
前記載置面と凹部との間に、上側に行くほど拡がるテーパ面が設けられている請求項1、又は2に記載の搬送システム。
【請求項6】
前記凹部が前記載置面において、対角に配置されている請求項1、又は2に記載の搬送システム。
【請求項7】
位置決め用の凸部が凹部に入らない場合、積み込みエラーと判定して、一端離れた後にリトライする請求項1、又は2に記載の搬送システム。
【請求項8】
前記凸部の表面が光を吸収する色で形成されている請求項1、又は2に記載の搬送システム。
【請求項9】
前記ワゴンをさらに備えた請求項1、又は2に記載の搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送システムに関する。
続きを表示(約 980 文字)
【背景技術】
【0002】
特許文献1には、搬送対象となる棚を搬送する自律走行車が開示されている。棚には凸部が設けられ、自律走行車には前後に挟むように凸部と係合する係合部が設けられている。ドッキング制御に利用されるセンサは、発光部からの光を検知したい物体で遮り、反射した光を受光部で受信している。
【先行技術文献】
【特許文献】
【0003】
特開2022-144293号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットの自律移動だけでは位置決め精度が高くないため、棚などを搭載できない場合がある。発光部と受光部が底面に設けられているため、埃などが堆積すると誤検知してしまう。
【課題を解決するための手段】
【0005】
本実施形態にかかる搬送システムは、下方に向けて突出した複数の凸部を有するワゴンを搭載して移動する移動ロボットと、を備えた搬送システムであって、前記移動ロボットは、前記ワゴンが載置される載置面を有し、前記ワゴンの下側に進入するステージと、前記ワゴンの受け渡しを行うために、前記ステージを昇降させる昇降機構と、前記複数の凸部に対応して設けられた複数の凹部と、少なくとも一つの前記凹部の側面に設けられた光学センサと、前記光学センサでの検出結果に応じて、前記凸部が前記凹部に挿入されていることを検知する検知部と、を備えている。
【0006】
上記の搬送システムは、前記光学センサでの検出光量を閾値と比較して、挿入状態が正常か否かを判定してもよい。
【0007】
上記の搬送システムにおいて、前記光学センサが、前記複数の凹部のうちの一部の凹部にのみ設けられていてもよい。
【0008】
上記の搬送システムは、前記凸部の先端が曲面となっており、先端に行くほど小さくなっていてもよい。
【0009】
上記の搬送システムは、前記載置面と凹部との間に、上側に行くほど拡がるテーパ面が設けられていてもよい。
【0010】
上記の搬送システムにおいて、前記凹部が前記載置面において、対角に配置されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
コフロック株式会社
流量制御装置
1か月前
スター精密株式会社
工作機械
今日
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
1か月前
株式会社明電舎
車両
1か月前
株式会社豊田自動織機
荷役車両
26日前
株式会社フジキン
流量制御装置
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社シンテックホズミ
搬送ロボット
15日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
5日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
旭精機工業株式会社
監視データ処理装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
トヨタ自動車株式会社
自律走行装置
5日前
日本精工株式会社
制御システムおよび制御方法
5日前
ミツミ電機株式会社
電源回路及びその起動方法
5日前
ローム株式会社
半導体装置
5日前
ローム株式会社
定電圧生成回路
1か月前
ブラザー工業株式会社
調整方法及び数値制御装置
27日前
株式会社FUJI
工作機械
1か月前
ローム株式会社
定電圧生成回路
1か月前
ローム株式会社
定電圧生成回路
19日前
株式会社シマノ
人力駆動車の操作装置
26日前
富士電機株式会社
制御システム
1か月前
キヤノン株式会社
制御システム及び制御方法
1か月前
アズビル株式会社
保全システム
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ