TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019670
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123401
出願日
2023-07-28
発明の名称
流量制御装置
出願人
株式会社フジキン
代理人
個人
,
個人
主分類
G05D
7/06 20060101AFI20250131BHJP(制御;調整)
要約
【課題】 制御精度が向上した圧力式の流量制御装置を提供する。
【解決手段】
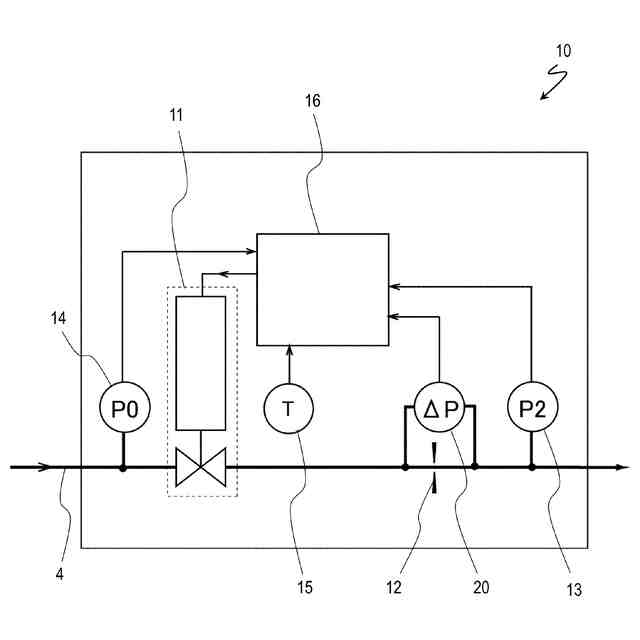
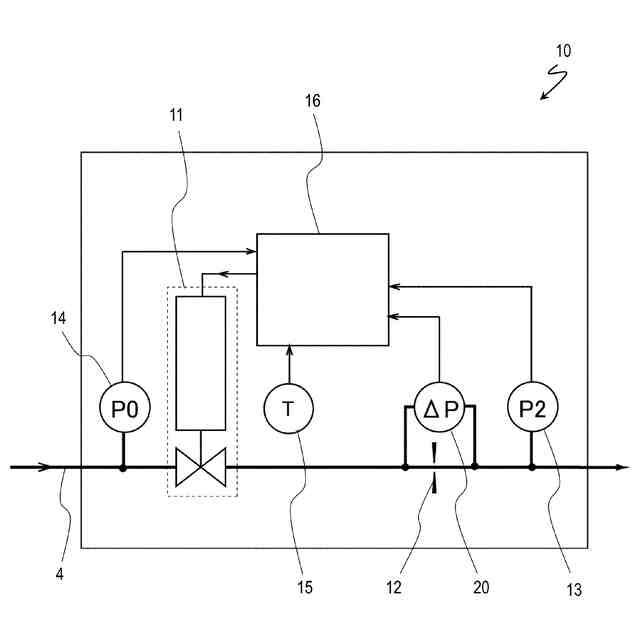
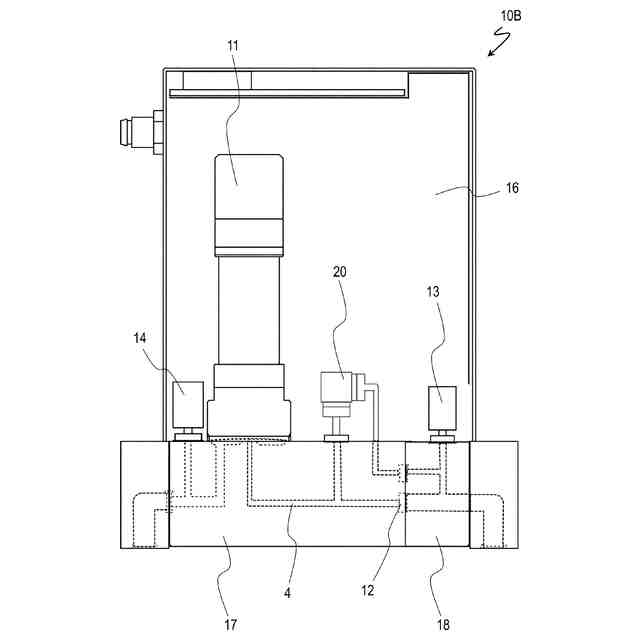
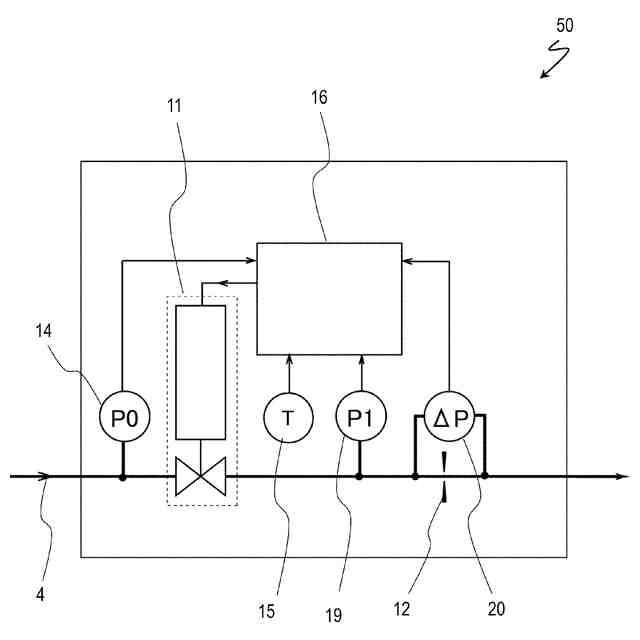
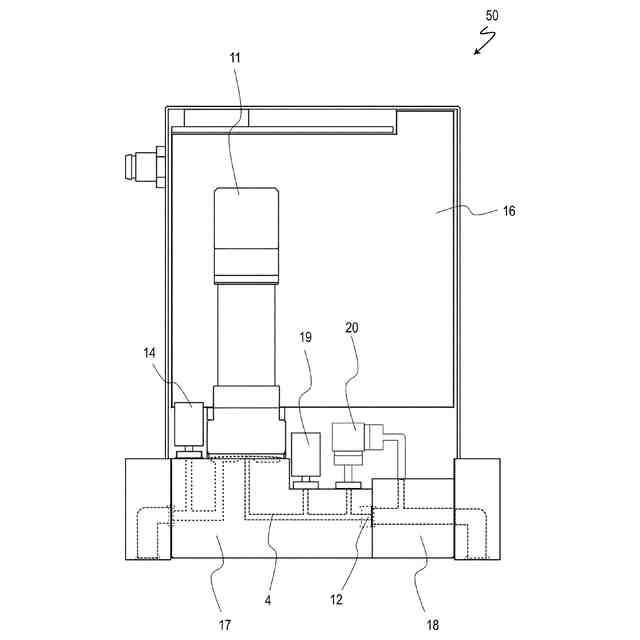
流量制御装置10、50は、コントロール弁11と、コントロール弁の下流側に設けられた絞り部12と、絞り部の上流側と下流側との差圧を測定する差圧センサ20と、絞り部の下流側又は上流側の圧力を測定する圧力センサ13、19と、演算制御回路16とを備えており、圧力センサの出力P1、P2と差圧センサの出力ΔPとに基づいて決定される演算流量が設定流量となるようにコントロール弁の制御を行い、また、予め設定された補正情報を参照して、差圧センサが出力する差圧ΔPが圧力センサの出力P1、P2に基づいて補正され、補正された差圧ΔP’に基づいて流量が制御されるように構成されている。
【選択図】 図2
特許請求の範囲
【請求項1】
コントロール弁と、
前記コントロール弁の下流側に設けられた絞り部と、
前記絞り部の上流側と下流側との差圧を測定する差圧センサと、
前記絞り部の下流側又は前記絞り部の上流側の少なくとも一方の圧力を測定する圧力センサと、
前記コントロール弁と、前記差圧センサと、前記圧力センサに接続された演算制御回路と
を備える、流量制御装置であって、
前記演算制御回路は、前記圧力センサの出力と前記差圧センサの出力とに基づいて決定される演算流量が設定流量となるように前記コントロール弁の制御を行うように構成されており、
予め設定された補正情報を参照して、差圧センサが出力する差圧が前記圧力センサの出力に基づいて補正され、補正された差圧に基づいて流量が制御されるように構成されている、流量制御装置。
続きを表示(約 1,100 文字)
【請求項2】
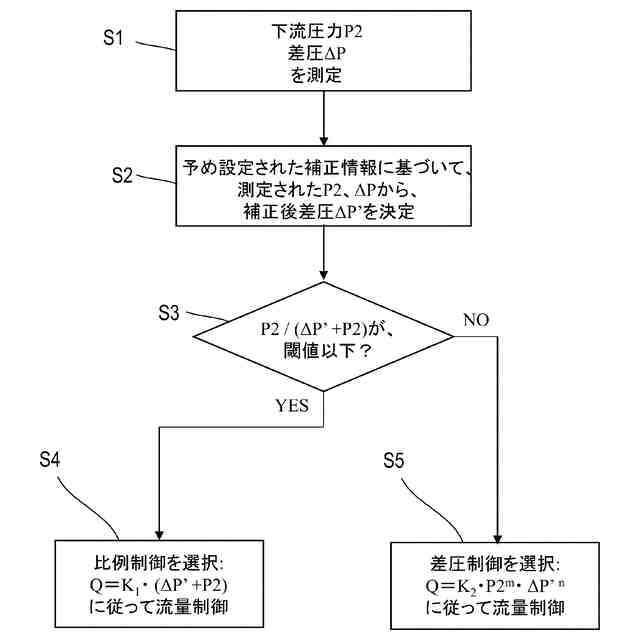
前記演算制御回路は、流量制御時において、前記圧力センサの出力と、前記補正された差圧とに基づいて決定される演算流量と設定流量との差が解消するように前記コントロール弁の制御を行うように構成されており、
前記コントロール弁の制御は、
Q=K
1
・(ΔP’+P2)またはQ=K
1
・P1にしたがって算出された流量Qに基づいて制御を行う比例制御と、
Q=K
2
・P2
m
・ΔP’
n
またはQ=K
2
・(P1-ΔP’)
m
ΔP’
n
にしたがって算出された流量Qに基づいて制御を行う差圧制御とを含み、
上記式において、K
1
およびK
2
はガス種とガス温度に依存する定数であり、ΔP’は前記補正された差圧であり、P2は前記圧力センサとして設けられた前記絞り部の下流側の圧力を測定する下流圧力センサが出力する下流圧力であり、P1は前記圧力センサとして設けられた前記絞り部の上流側の圧力を測定する上流圧力センサが出力する上流圧力であり、mおよびnは実際の流量を元に導出される指数である、請求項1に記載の流量制御装置。
【請求項3】
前記補正された差圧と前記下流圧力センサが出力する下流圧力とを加算して得られる上流圧力と、前記下流圧力センサが出力する下流圧力との比を、所定の閾値と比較することによって、または、
前記上流圧力センサが出力する上流圧力と、前記上流圧力センサが出力する上流圧力から前記補正された差圧を減算することによって得られる下流圧力との比を、所定の閾値と比較することによって、
前記比例制御または前記差圧制御のいずれかを行うかを選択するように構成されている、請求項2に記載の流量制御装置。
【請求項4】
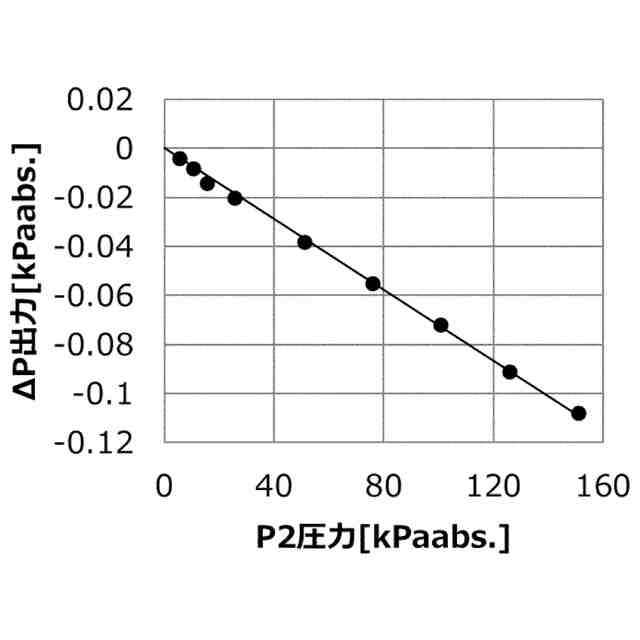
前記補正情報は、ΔP’=ΔP+α・P2またはΔP’=ΔP+α・P1によって規定されており、上記式において、ΔP’は前記補正された差圧であり、ΔPは前記差圧センサが出力する差圧であり、αは予め設定された係数であり、P2は前記圧力センサとして設けられた前記絞り部の下流側の圧力を測定する下流圧力センサが出力する下流圧力であり、P1は前記圧力センサとして設けられた前記絞り部の上流側の圧力を測定する上流圧力センサが出力する上流圧力である、請求項1から3のいずれかに記載の流量制御装置。
【請求項5】
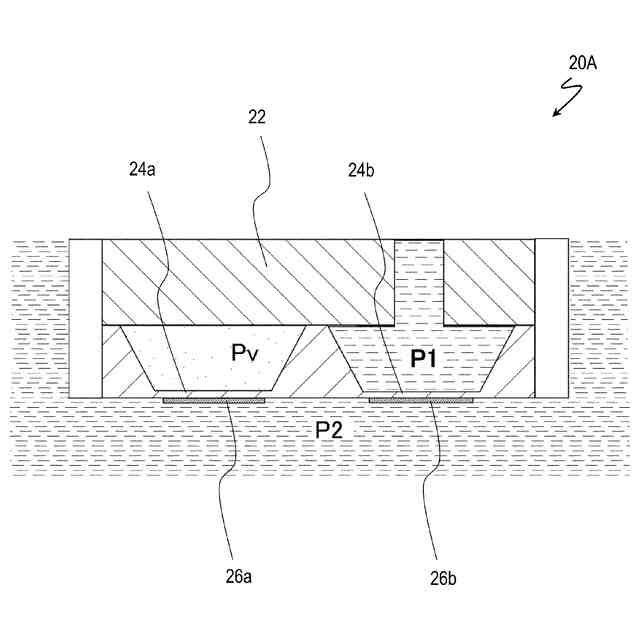
前記圧力センサと、前記差圧センサとが一体的に形成されている、請求項1から3のいずれかに記載の流量制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、流量制御装置に関し、特に、半導体製造設備や化学品製造設備等のガス供給ラインに設けられる流量制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
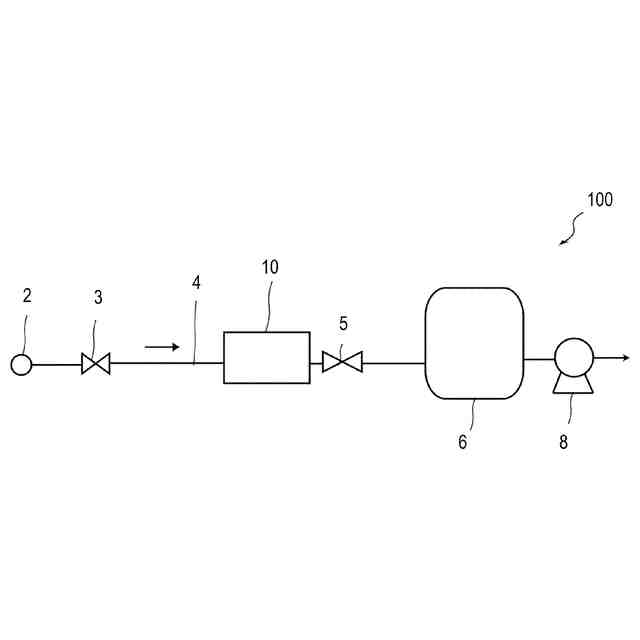
半導体製造装置や化学プラントにおいて、材料ガスやエッチングガス等の流量を制御するために、種々のタイプの流量計および流量制御装置が利用されている。このなかで圧力式流量制御装置は、コントロール弁と絞り部(例えばオリフィスプレートや臨界ノズル)とを組み合せた比較的簡単な機構によって各種流体の質量流量を高精度に制御することができるので広く利用されている。圧力式流量制御装置は、熱式流量制御装置とは異なり、一次側供給圧が大きく変動しても安定した流量制御が行えるという優れた流量制御特性を有している。
【0003】
圧力式流量制御装置には、絞り部の上流側の流体圧力(以下、上流圧力P1と呼ぶことがある)を制御することによって流量を調整するものがある。また、上流圧力P1は、絞り部の上流側に配置されたコントロール弁の開度を調整することによって制御される。
【0004】
上流圧力P1に対して下流圧力P2(絞り部の下流側の流体圧力)が十分に小さい状況では、絞り部を通過するガスの速度は音速に固定され、質量流量は、下流圧力P2によらず上流圧力P1によって決定される。このため、上流圧力P1を測定する圧力センサの出力に基づいてコントロール弁をフィードバック制御することによって、上流圧力P1ひいては流量を制御することが可能である。このような挙動が生じる圧力条件を臨界膨張条件と呼び、例えばP2/P1≦A(あるいはP1/P2≧B)のように規定され、臨界圧力比Aの値は、ガス種によって異なる。このような上流圧力P1の測定に基づいて行う流量制御は、比例制御と呼ばれることがある。
【0005】
また、特許文献1には、絞り部の上流側だけでなく下流側にも圧力センサを設けた圧力式流量制御装置が記載されている。この圧力式流量制御装置では、下流圧力P2が比較的大きく、上記の臨界膨張条件を満たさない場合であっても、流量を、上流圧力P1および下流圧力P2に基づいて演算によって求めることができる。このため、下流圧力センサを有する場合、より広い圧力条件範囲で流量制御を行うことができる。上流圧力P1および下流圧力P2の測定に基づいて行う流量制御は、差圧制御と呼ばれることがある。
【先行技術文献】
【特許文献】
【0006】
特許第4204400号公報
国際公開第2020/218138号
国際公開第2017/057129号
【発明の概要】
【発明が解決しようとする課題】
【0007】
昨今、絞り部の下流側の下流圧力P2が、従来よりも高い状態で流量制御を行うケースが増えてきている。このような状況においては、非臨界膨張条件下での流量制御が求められることも多く、上流圧力P1と下流圧力P2とを測定する必要がある。ただし、従来の圧力式流量制御装置では、上流圧力センサおよび下流圧力センサの各々の精度誤差、特に圧力センサのゼロ点ズレなどによって、流量測定誤差が比較的大きくなることがあった。なお、圧力センサのゼロ点ズレとは、実際の圧力がゼロのときにも圧力センサの出力がゼロを示さず、有意な差をもってゼロとは異なる値を示す事象である。
【0008】
これに対して、本出願人は、特許文献2において、上流圧力P1と下流圧力P2とをそれぞれ直接的に測定するのではなく、上流圧力P1と下流圧力P2との差圧を直接測定する差圧センサと、上流圧力センサまたは下流圧力センサのいずれか一方とを設ける構成を提案している。差圧センサは、絞り部に対する一次側圧力(上流圧力P1)と二次側圧力(下流圧力P2)との差圧ΔP=P1-P2を、差圧に応じて変形するダイヤフラムの歪みを検出することなどによって直接的に測定することができる。
【0009】
上記のように差圧センサと絶対圧センサとを組み合わせて用いた場合、差圧ΔPだけではなく、上流圧力P1および下流圧力P2も、各センサの出力から演算によって求めることができる。したがって、臨界膨張条件を満たしているかどうかの判定を行うことが可能であり、また、流量制御においても比例制御と差圧制御との両方を行うことが可能である。差圧センサと絶対圧センサとを組み合わせた流量制御装置については、特許文献3にも記載がある。
【0010】
このような流量制御装置では、特許文献2に開示されているように、圧力センサのゼロ点ズレによる流量測定誤差の増大を抑制することができる。差圧センサの精度誤差は、例えば、上流圧力センサの上流側のバルブと下流圧力センサの下流側のバルブとが閉じられに封止空間が形成されている状況において、差圧センサの出力を参照して確認することができ、その結果に基づいて校正を行うことも可能である。このようにして行う差圧センサの誤差補正は、完全な真空状態を形成して行う必要がある絶対圧センサの誤差補正に比べて、容易に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
26日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
29日前
株式会社ダイフク
搬送車
29日前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
26日前
トヨタ自動車株式会社
工作機械の制御装置
27日前
トヨタ自動車株式会社
工作機械の制御装置
28日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
14日前
株式会社ダイフク
物品搬送設備
27日前
株式会社タブチ
減圧弁
8日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
26日前
株式会社ダイヘン
搬送車
26日前
株式会社ダイヘン
搬送車
26日前
株式会社ダイヘン
搬送車
26日前
チームラボ株式会社
走行システム及び走行路
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
井関農機株式会社
作業車両
22日前
株式会社デンソー
診断装置
12日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
29日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
8日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































