TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020604
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124090
出願日
2023-07-31
発明の名称
調整方法及び数値制御装置
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
G05B
19/404 20060101AFI20250205BHJP(制御;調整)
要約
【課題】フィードフォワード制御において使用される指令値を算出するときに用いられる定数を、適正な値に調整する調整方法、及び数値制御装置を提供する。
【解決手段】数値制御装置は、第1定数C
1
を第1初期定数とし、第2定数C
2
を第2初期定数とし、第3定数C
3
を第3初期定数とした初期状態で駆動したモータの初期位置情報と、初期状態に対して第i定数(i=1,2,3)を第i変更定数に変更して駆動したモータの回転位置に応じた第i位置情報とを取得する。数値制御装置は、取得された第i位置情報と初期位置情報との間の偏差を第i偏差として算出する。数値制御装置は、算出した第i偏差に第i更新定数を乗算した3つの乗算値を加算した結果が初期位置情報に最も近似する場合における第i更新定数を決定する。数値制御装置は、決定した第i更新乗数を演算器に設定し、更新する。
【選択図】図5
特許請求の範囲
【請求項1】
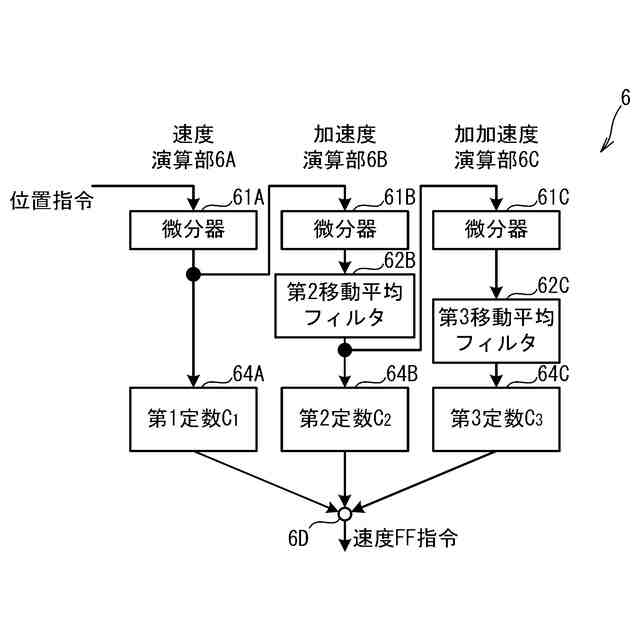
モータの回転位置を制御する為の位置指令を1階微分した1階微分値に第1定数を乗算した第1演算値と、前記位置指令を2階微分した2階微分値に第2移動平均フィルタを適用した算出結果に第2定数を乗算した第2演算値と、前記位置指令を3階微分した3階微分値に第3移動平均フィルタを適用した算出結果に第3定数を乗算した第3演算値とを加算した加算値を、前記モータの速度を制御する速度指令にフィードフォワード指令として加算する第1演算器を含む演算器のパラメータを調整する調整方法であって、
前記第1定数を第1初期定数とし、前記第2定数を第2初期定数とし、前記第3定数を第3初期定数とした初期状態で駆動した前記モータの前記回転位置に応じた初期位置情報を取得する第1取得工程と、
i=1,2,3のそれぞれについて、前記初期状態に対して第i定数を第i変更定数に変更して駆動した前記モータの前記回転位置に応じた第i位置情報を、i毎に取得する第2取得工程と、
i=1,2,3のそれぞれについて、前記第2取得工程により取得された前記第i位置情報と、前記第1取得工程により取得された前記初期位置情報との間の偏差を、第i初期定数と前記第i変更定数との差分値で除算し、i毎に第i偏差として算出する算出工程と、
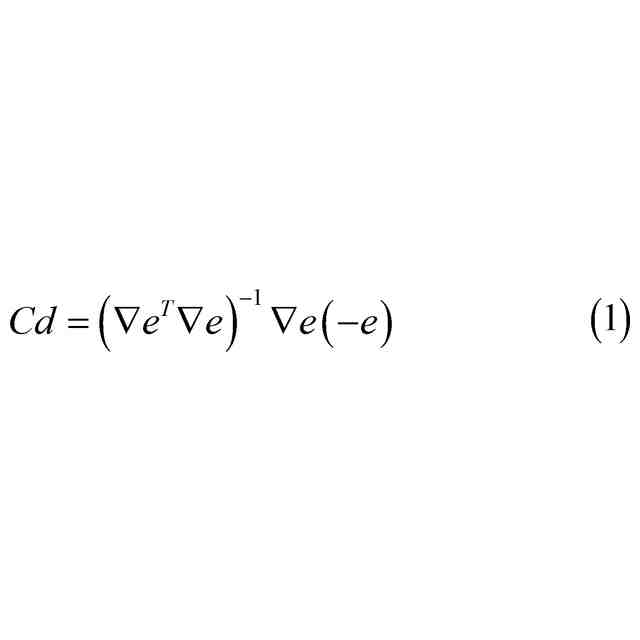
i=1,2,3のそれぞれについて、前記算出工程により算出した前記第i偏差に第i更新定数を乗算した3つの乗算値を加算した結果が、前記第1取得工程により取得された前記初期位置情報に最も近似する場合又は同一の場合における前記第i更新定数を、i=1,2,3のそれぞれについて決定する決定工程と、
i=1,2,3の少なくとも何れかについて、前記演算器の前記第i定数を、前記決定工程により決定された前記第i更新定数に基づいて更新する更新工程と
を備えたことを特徴とする調整方法。
続きを表示(約 2,600 文字)
【請求項2】
前記演算器は、
前記位置指令を3階微分した前記3階微分値に前記第3移動平均フィルタと1次遅れフィルタとを適用した算出結果に前記第3定数を乗算した前記第3演算値と、前記第1演算値及び前記第2演算値とを加算した前記加算値を、前記フィードフォワード指令として前記速度指令に加算する第2演算器を含み、
前記第1取得工程は、前記1次遅れフィルタを無効化した場合における前記初期位置情報を取得し、
前記第2取得工程は、前記1次遅れフィルタを無効化した場合における前記第i位置情報をi毎に取得し、
前記決定工程は、
i=1,2のそれぞれについて、前記算出工程により算出した前記第i偏差に前記第i更新定数を乗算した2つの乗算値と、前記算出工程により算出した第3偏差に、更新時定数の前記1次遅れフィルタを適用して第3更新定数を乗算した乗算値とを加算した結果が、前記第1取得工程により取得された前記初期位置情報に最も近似する場合又は同一の場合における第1更新定数、第2更新定数、前記第3更新定数、及び前記更新時定数を決定し、
前記更新工程は、
i=1,2,3の少なくとも何れかについて、前記演算器の前記第i定数を、前記決定工程により決定された前記第i更新定数に基づいて更新し、且つ、前記1次遅れフィルタの時定数を、前記決定工程により決定された前記更新時定数に基づいて更新することを特徴とする請求項1に記載の調整方法。
【請求項3】
モータの回転位置を制御する為の位置指令を1階微分した1階微分値に第1定数を乗算した第1演算値と、前記位置指令を2階微分した2階微分値に第2移動平均フィルタを適用した算出結果に第2定数を乗算した第2演算値とを加算した加算値を、前記モータの速度を制御する速度指令にフィードフォワード指令として加算し、且つ、前記位置指令を3階微分した3階微分値に第3移動平均フィルタを適用した算出結果に第3定数を乗算した第3演算結果を、前記モータのトルクを制御するトルク指令に前記フィードフォワード指令として加算する第3演算器を含む演算器のパラメータを調整する調整方法であって、
前記第1定数を第1初期定数とし、前記第2定数を第2初期定数とし、前記第3定数を第3初期定数とした初期状態で駆動した前記モータの前記回転位置に応じた初期位置情報を取得する第1取得工程と、
i=1,2,3のそれぞれについて、前記初期状態に対して第i定数を第i変更定数に変更して駆動した前記モータの前記回転位置に応じた第i位置情報を、i毎に取得する第2取得工程と、
i=1,2,3のそれぞれについて、前記第2取得工程により取得された前記第i位置情報と、前記第1取得工程により取得された前記初期位置情報との間の偏差を、第i初期定数と前記第i変更定数との差分値で除算し、i毎に第i偏差として算出する算出工程と、
i=1,2,3のそれぞれについて、前記算出工程により算出した前記第i偏差に第i更新定数を乗算した3つの乗算値を加算した結果が、前記第1取得工程により取得された前記初期位置情報に最も近似する場合又は同一の場合における前記第i更新定数を、i=1,2,3のそれぞれについて決定する決定工程と、
i=1,2,3の少なくとも何れかについて、前記演算器の前記第i定数を、前記決定工程により決定された前記第i更新定数に基づいて更新する更新工程と
を備えたことを特徴とする調整方法。
【請求項4】
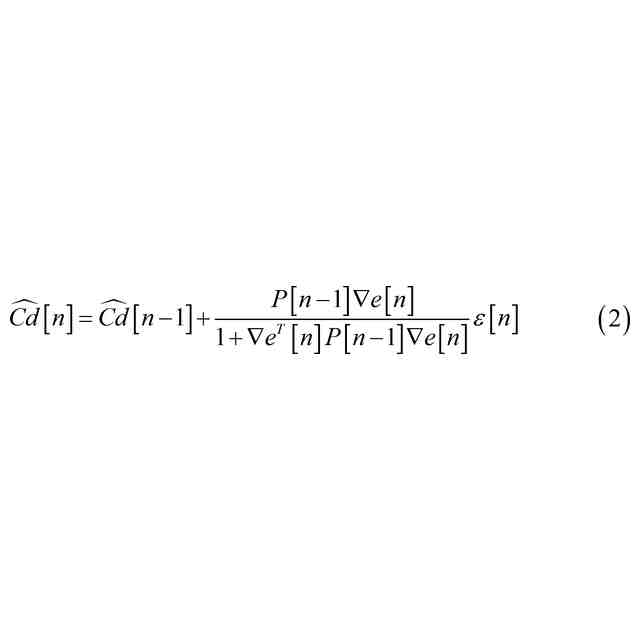
前記決定工程は、逐次最小二乗法を適用することにより、i=1,2,3のそれぞれについて前記第i更新定数を決定することを特徴とする請求項1又は3に記載の調整方法。
【請求項5】
前記決定工程は、
逐次最小二乗法を適用することにより、i=1,2,3のそれぞれについて、前記1次遅れフィルタの前記時定数毎に第i更新定数を算出し、
前記時定数毎に算出した前記第i更新定数のうち、前記第1取得工程により取得された前記初期位置情報との誤差が最も小さい前記第i更新定数を決定し、且つ、決定した前記第i更新定数に対応する前記時定数を前記更新時定数として決定する
ことを特徴とする請求項2に記載の調整方法。
【請求項6】
前記第1取得工程は、
駆動した前記モータの実際の前記回転位置と、前記位置指令が示す前記回転位置との偏差を、前記初期位置情報として取得し、
前記第2取得工程は、
駆動した前記モータの実際の前記回転位置と、前記位置指令が示す前記回転位置との偏差を、前記第i位置情報として取得する
ことを特徴とする請求項1から3の何れかに記載の調整方法。
【請求項7】
前記モータは、
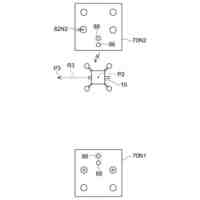
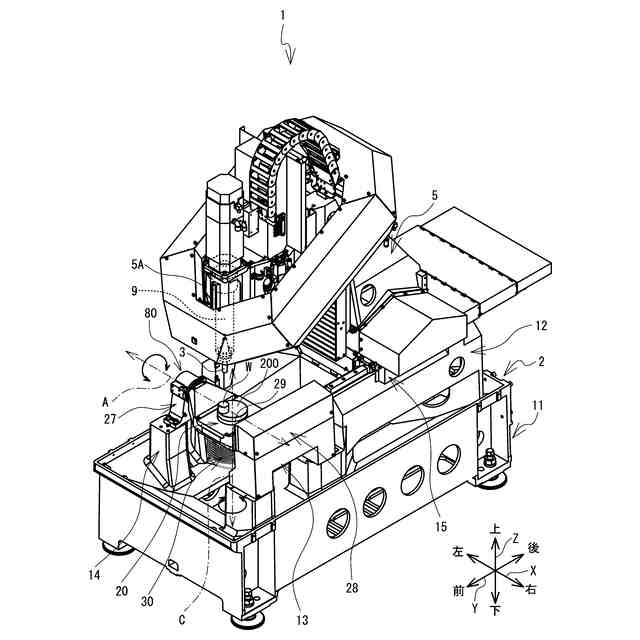
工作機械の工具に対して被削材を相対移動させる方向であって互いに直交するX方向、Y方向、及びZ方向のそれぞれの方向に前記被削材を相対移動させるために駆動されるか、又は、前記工具に対して前記被削材を、所定の回転軸を中心として相対的に回転させるために駆動されることを特徴とする請求項1から3の何れかに記載の調整方法。
【請求項8】
前記第1取得工程及び前記第2取得工程では、
前記工作機械が前記工具により前記被削材を切削する切削命令に応じて駆動する前記モータの前記回転位置に応じた情報を取得することを特徴とする請求項7に記載の調整方法。
【請求項9】
前記第1取得工程及び前記第2取得工程では、
前記工具に対して前記被削材を所定の一方向に相対移動させる前記切削命令に応じて駆動する前記モータの前記回転位置に応じた情報を取得することを特徴とする請求項8に記載の調整方法。
【請求項10】
前記工作機械は、前記工具に対する前記被削材の相対移動を強制的に停止させる停止制御機能を有効とするか無効とするかを切り替え可能であり、
前記更新工程は、
前記停止制御機能が無効である場合に、前記更新工程により、i=1,2,3の少なくとも何れかについて、前記第i定数を前記第i更新定数に更新することを特徴とする請求項7に記載の調整方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、調整方法及び数値制御装置に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1は、位置指令に対する追従性の改善の為にフィードフォワード制御を行う数値制御装置を開示する。数値制御装置は、位置指令を1階微分した値、位置指令を2階微分した値、位置指令を3階微分した値、位置指令を1階微分し更にフィルタリングした値の夫々に定数を乗算して得た値に基づき、フィードフォワード制御において使用される指令値を算出する。
【先行技術文献】
【特許文献】
【0003】
特開2011-113475号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
フィードフォワード制御において使用される指令値を算出するために用いられる定数の適正な値は、工作機械に対する被削材の積載条件や潤滑油の粘性によって異なる。しかし、特許文献1に記載の数値制御装置では、測定等により定められた所定の定数が常に用いられる。この場合、フィードフォワード制御において使用される指令値を、適正な値の定数を用いて算出できない可能性があるという問題点がある。
【0005】
本発明の目的は、フィードフォワード制御において使用される指令値を算出するときに用いられる定数を、適正な値に調整する調整方法、及び数値制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の第1態様に係る調整方法は、モータの回転位置を制御する為の位置指令を1階微分した1階微分値に第1定数を乗算した第1演算値と、前記位置指令を2階微分した2階微分値に第2移動平均フィルタを適用した算出結果に第2定数を乗算した第2演算値と、前記位置指令を3階微分した3階微分値に第3移動平均フィルタを適用した算出結果に第3定数を乗算した第3演算値とを加算した加算値を、前記モータの速度を制御する速度指令にフィードフォワード指令として加算する第1演算器を含む演算器のパラメータを調整する調整方法であって、前記第1定数を第1初期定数とし、前記第2定数を第2初期定数とし、前記第3定数を第3初期定数とした初期状態で駆動した前記モータの前記回転位置に応じた初期位置情報を取得する第1取得工程と、i=1,2,3のそれぞれについて、前記初期状態に対して第i定数を第i変更定数に変更して駆動した前記モータの前記回転位置に応じた第i位置情報を、i毎に取得する第2取得工程と、i=1,2,3のそれぞれについて、前記第2取得工程により取得された前記第i位置情報と、前記第1取得工程により取得された前記初期位置情報との間の偏差を、第i初期定数と前記第i変更定数との差分値で除算し、i毎に第i偏差として算出する算出工程と、i=1,2,3のそれぞれについて、前記算出工程により算出した前記第i偏差に第i更新定数を乗算した3つの乗算値を加算した結果が、前記第1取得工程により取得された前記初期位置情報に最も近似する場合又は同一の場合における前記第i更新定数を、i=1,2,3のそれぞれについて決定する決定工程と、i=1,2,3の少なくとも何れかについて、前記演算器の前記第i定数を、前記決定工程により決定された前記第i更新定数に基づいて更新する更新工程とを備えたことを特徴とする。
【0007】
第1態様によれば、フィードフォワード制御を行う演算器において速度指令に加算する加算値を算出するときに用いられる第1定数、第2定数、及び第3定数を、適正な値に調整できる。
【0008】
第1態様において、前記演算器は、前記位置指令を3階微分した前記3階微分値に前記第3移動平均フィルタと1次遅れフィルタとを適用した算出結果に前記第3定数を乗算した前記第3演算値と、前記第1演算値及び前記第2演算値とを加算した前記加算値を、前記フィードフォワード指令として前記速度指令に加算する第2演算器を含み、前記第1取得工程は、前記1次遅れフィルタを無効化した場合における前記初期位置情報を取得し、前記第2取得工程は、前記1次遅れフィルタを無効化した場合における前記第i位置情報をi毎に取得し、前記決定工程は、i=1,2のそれぞれについて、前記算出工程により算出した前記第i偏差に前記第i更新定数を乗算した2つの乗算値と、前記算出工程により算出した第3偏差に、更新時定数の前記1次遅れフィルタを適用して第3更新定数を乗算した乗算値とを加算した結果が、前記第1取得工程により取得された前記初期位置情報に最も近似する場合又は同一の場合における第1更新定数、第2更新定数、前記第3更新定数、及び前記更新時定数を決定し、前記更新工程は、i=1,2,3の少なくとも何れかについて、前記演算器の前記第i定数を、前記決定工程により決定された前記第i更新定数に基づいて更新し、且つ、前記1次遅れフィルタの時定数を、前記決定工程により決定された前記更新時定数に基づいて更新してもよい。この場合、フィードフォワード制御を行う演算器において速度指令に加算する加算値を算出するときに用いられる1次遅れフィルタの時定数を、適正な値に調整できる。
【0009】
本発明の第2態様に係る調整方法は、モータの回転位置を制御する為の位置指令を1階微分した1階微分値に第1定数を乗算した第1演算値と、前記位置指令を2階微分した2階微分値に第2移動平均フィルタを適用した算出結果に第2定数を乗算した第2演算値とを加算した加算値を、前記モータの速度を制御する速度指令にフィードフォワード指令として加算し、且つ、前記位置指令を3階微分した3階微分値に第3移動平均フィルタを適用した算出結果に第3定数を乗算した第3演算結果を、前記モータのトルクを制御するトルク指令に前記フィードフォワード指令として加算する第3演算器を含む演算器のパラメータを調整する調整方法であって、前記第1定数を第1初期定数とし、前記第2定数を第2初期定数とし、前記第3定数を第3初期定数とした初期状態で駆動した前記モータの前記回転位置に応じた初期位置情報を取得する第1取得工程と、i=1,2,3のそれぞれについて、前記初期状態に対して第i定数を第i変更定数に変更して駆動した前記モータの前記回転位置に応じた第i位置情報を、i毎に取得する第2取得工程と、i=1,2,3のそれぞれについて、前記第2取得工程により取得された前記第i位置情報と、前記第1取得工程により取得された前記初期位置情報との間の偏差を、第i初期定数と前記第i変更定数との差分値で除算し、i毎に第i偏差として算出する算出工程と、i=1,2,3のそれぞれについて、前記算出工程により算出した前記第i偏差に第i更新定数を乗算した3つの乗算値を加算した結果が、前記第1取得工程により取得された前記初期位置情報に最も近似する場合又は同一の場合における前記第i更新定数を、i=1,2,3のそれぞれについて決定する決定工程と、i=1,2,3の少なくとも何れかについて、前記演算器の前記第i定数を、前記決定工程により決定された前記第i更新定数に基づいて更新する更新工程とを備えたことを特徴とする。
【0010】
第2態様によれば、フィードフォワード制御を行う演算器において速度指令に加算する加算値を算出するときに用いられる第1定数、第2定数、及び第3定数を、適正な値に調整できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三共木工株式会社
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
3日前
他の特許を見る



 特許ウォッチ
特許ウォッチ