TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025006386
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107148
出願日
2023-06-29
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
G05D
1/43 20240101AFI20250109BHJP(制御;調整)
要約
【課題】自動操向が可能な作業車において、手動操向での走行基準の設定の手間を削減する。
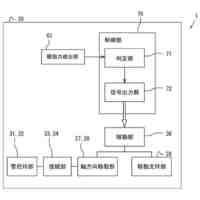
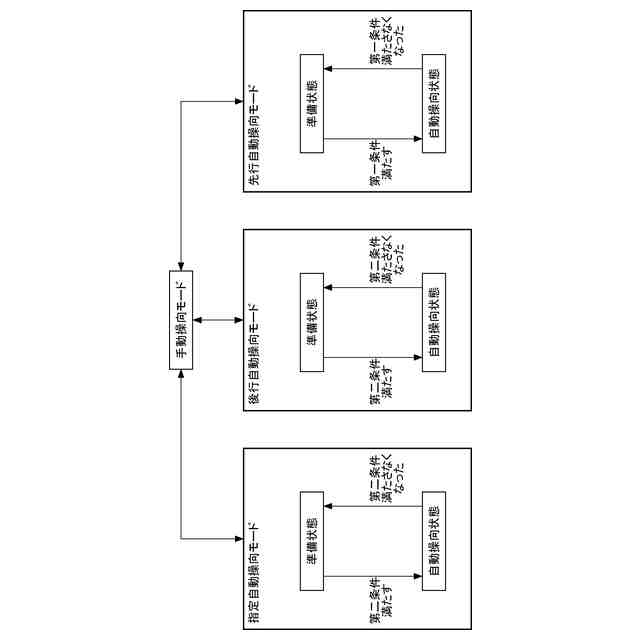
【解決手段】操向可能な走行装置を走行基準に基づいて制御する自動操向を可能な作業車。衛星測位を用いて機体位置を取得する機体位置取得部と、手動操向による走行中に、機体位置取得部によって取得された機体位置に基づいて走行基準としての先行走行基準を決定し、先行走行基準に基づいて自動操向を開始する先行自動操向制御部と、先行自動操向制御部による自動操向の実行中に走行基準を決定するための後行基準情報を取得し、後行基準情報に基づいて走行基準としての後行走行基準を決定し、先行自動操向制御部による自動操向の終了後に後行走行基準に基づいて自動操向を開始する後行自動操向制御部と、が備えられている。
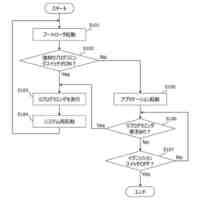
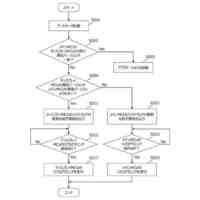
【選択図】図9
特許請求の範囲
【請求項1】
操向可能な走行装置を走行基準に基づいて制御する自動操向を可能な作業車であって、
衛星測位を用いて機体位置を取得する機体位置取得部と、
手動操向による走行中に、前記機体位置取得部によって取得された前記機体位置に基づいて前記走行基準としての先行走行基準を決定し、前記先行走行基準に基づいて前記自動操向を開始する先行自動操向制御部と、
前記先行自動操向制御部による前記自動操向の実行中に前記走行基準を決定するための後行基準情報を取得し、前記後行基準情報に基づいて前記走行基準としての後行走行基準を決定し、前記先行自動操向制御部による前記自動操向の終了後に前記後行走行基準に基づいて前記自動操向を開始する後行自動操向制御部と、が備えられている作業車。
続きを表示(約 930 文字)
【請求項2】
前記後行基準情報の取得を指示する人為操作を受け付ける取得操作受付部が備えられ、
前記後行自動操向制御部は、前記取得操作受付部が人為操作を受け付けたことに応じて、前記機体位置取得部が取得した前記機体位置を前記後行基準情報として取得する請求項1に記載の作業車。
【請求項3】
前記後行基準情報の取得を指示する前記人為操作を受付可能か否かを報知する受付報知部が備えられている請求項2に記載の作業車。
【請求項4】
前記後行自動操向制御部は、前記先行走行基準を前記後行走行基準として決定する請求項1に記載の作業車。
【請求項5】
前記先行走行基準の補正を指示する人為操作を受け付ける補正操作受付部が備えられ、
前記先行自動操向制御部は、前記補正操作受付部が人為操作を受け付けたことに応じて前記先行走行基準を補正し、
前記後行自動操向制御部は、補正された前記先行走行基準を前記後行走行基準として決定する請求項1に記載の作業車。
【請求項6】
前記後行自動操向制御部による前記自動操向の禁止を指示する人為操作を受け付ける禁止操作受付部が備えられ、
前記後行自動操向制御部は、前記禁止操作受付部が人為操作を受け付けたことに応じて前記自動操向を禁止する請求項1に記載の作業車。
【請求項7】
前記後行自動操向制御部が決定した前記後行基準情報を含む前記走行基準を記憶する記憶部と、
前記記憶部に記憶された前記走行基準から前記自動操向に用いられる前記走行基準を指定する人為操作を受け付ける指定操作受付部と、
前記指定操作受付部が受け付けた人為操作によって指定される前記走行基準に基づいて前記自動操向を開始する指定自動操向制御部と、が備えられている請求項1に記載の作業車。
【請求項8】
前記先行走行基準に基づく前記自動操向が実行中であること、及び、前記後行走行基準に基づく前記自動操向が実行中であること、のうちの少なくとも一方を報知する実行報知部が備えられている請求項1から6の何れか一項に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操向可能な走行装置を走行基準に基づいて制御する自動操向を可能な作業車に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば特許文献1には、二点間走行における始点と終点との夫々で算出された機体位置に基づいて走行基準(文献では「基準方位」)が算出される作業車(文献では「農作業機」)が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-13552号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従来の作業車では、走行基準を設定するために、予め手動操向で二点間走行を行って始点と終点との夫々の機体位置を取得する作業を行う必要があった。このため、オペレータ等の中には、わざわざ二点間走行を行うことを面倒に感じる者も存在する。
【0005】
本発明の目的は、自動操向が可能な作業車において、手動操向での走行基準の設定の手間を削減することにある。
【課題を解決するための手段】
【0006】
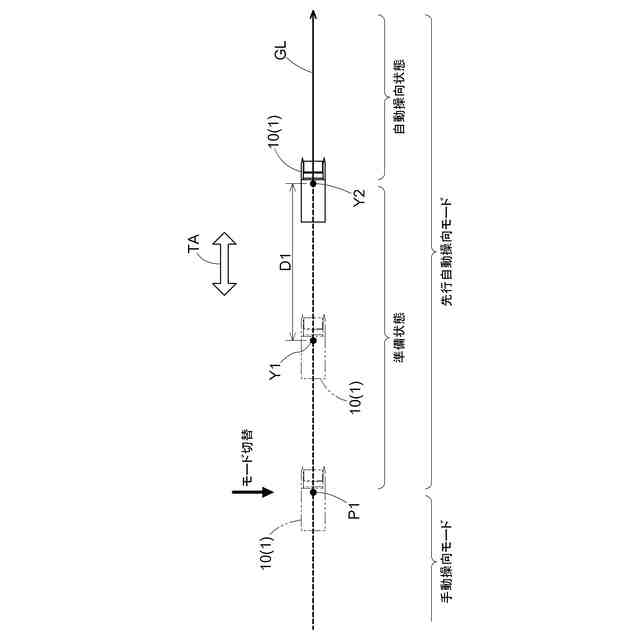
上記の課題を解決する手段として、本発明に係る作業車は、操向可能な走行装置を走行基準に基づいて制御する自動操向を可能な作業車であって、衛星測位を用いて機体位置を取得する機体位置取得部と、手動操向による走行中に、前記機体位置取得部によって取得された前記機体位置に基づいて前記走行基準としての先行走行基準を決定し、前記先行走行基準に基づいて前記自動操向を開始する先行自動操向制御部と、前記先行自動操向制御部による前記自動操向の実行中に前記走行基準を決定するための後行基準情報を取得し、前記後行基準情報に基づいて前記走行基準としての後行走行基準を決定し、前記先行自動操向制御部による前記自動操向の終了後に前記後行走行基準に基づいて前記自動操向を開始する後行自動操向制御部と、を具備する。
【0007】
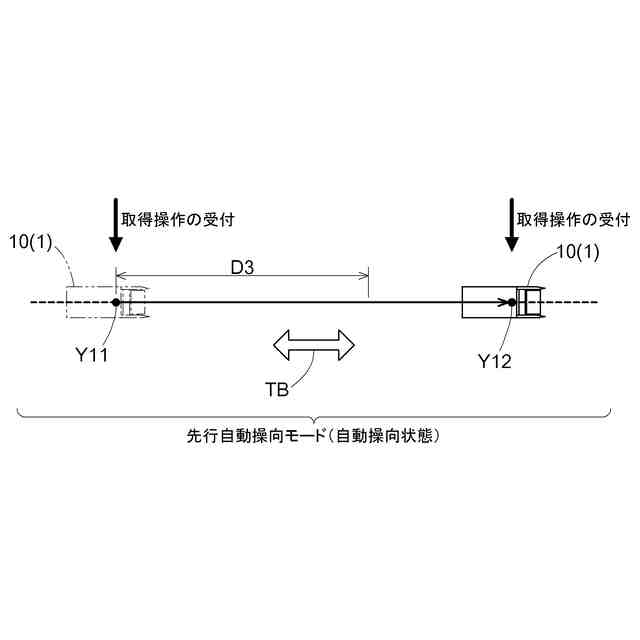
本発明によると、手動操向による走行中に機体位置が取得され、先行自動操向制御部が当該機体位置に基づいて先行走行基準を決定して自動操向を開始する。そして、後行自動操向制御部が当該自動操向中に後行基準情報を取得して、当該後行基準情報に基づいて後行走行基準を決定する。つまり、先行走行基準に基づいて開始される自動操向の際中に、その後の自動操向のための後行基準情報が取得され、後行走行基準が決定される。このため、例えばオペレータ等が予め手動操向で二点間走行を行わなくても、自動操向を行いながら、その後の自動操向のための走行基準の決定が可能となる。これにより、自動操向が可能な作業車において、手動操向での走行基準の設定の手間を削減することができる。
【0008】
本発明に係る作業車において、前記後行基準情報の取得を指示する人為操作を受け付ける取得操作受付部を具備し、前記後行自動操向制御部は、前記取得操作受付部が人為操作を受け付けたことに応じて、前記機体位置取得部が取得した前記機体位置を前記後行基準情報として取得すると好適である。
【0009】
本構成であれば、人為操作に応じて後行基準情報が取得される。このため、先行後行取得される後行基準情報がオペレータの意思を反映した適切なものになりやすい。
【0010】
本発明に係る作業車において、前記後行基準情報の取得を指示する前記人為操作を受付可能か否かを報知する受付報知部を具備すると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
今日
株式会社クボタ
キャビン
今日
株式会社クボタ
キャビン
今日
株式会社クボタ
キャビン
今日
株式会社クボタ
圃場作業車
今日
株式会社クボタ
電動トラクタ
今日
株式会社クボタ
農作業システム
今日
株式会社クボタ
レールシステム
今日
株式会社クボタ
作業車用のキャビン
今日
株式会社クボタ
作業車用のキャビン
今日
株式会社クボタ
作業車用のキャビン
今日
株式会社クボタ
管継手及びシール部材
今日
株式会社クボタ
管接合装置及び管接合方法
今日
株式会社クボタ
管挿入装置及び管挿入方法
今日
株式会社クボタ
管接合装置及び管接合方法
今日
株式会社クボタケミックス
樹脂成形体および成形方法
今日
株式会社クボタケミックス
三次元積層造形用のフィラメント
今日
株式会社クボタ
管位置決め装置及び管位置決め方法
今日
株式会社クボタ
自動走行制御システムおよび作業車
今日
株式会社クボタ
メータパネルユニットおよび作業車両
今日
株式会社クボタ
メータパネルユニットおよび作業車両
今日
株式会社クボタ
接合角度調整装置及び接合角度調整方法
今日
株式会社クボタ
自動走行制御システム、及び圃場作業車
今日
株式会社クボタ
作業車両、および作業車両を制御する方法
今日
株式会社クボタ
収穫物の搬送システムおよびコンテナ装置
今日
株式会社クボタ
受口カバー、滑剤供給装置及び滑剤供給方法
今日
株式会社クボタ
シール部材、継手構造及びシール部材の取付方法
今日
株式会社クボタ
高強度、高延性及び高衝撃値を有するダクタイル鋳鉄
今日
株式会社クボタ
農作業車、情報処理方法、及びコンピュータプログラム
今日
株式会社クボタケミックス
樹脂製継手及び樹脂製継手と樹脂製管を接続してなる配管構造
今日
株式会社クボタ
情報表示システム、作業車両、情報表示方法およびコンピュータプログラム
今日
株式会社クボタ
情報表示システム、情報表示方法、コンピュータプログラムおよび作業車両
今日
株式会社クボタ
管路図設計支援方法、管路図設計支援装置および管路図設計支援プログラム
今日
株式会社クボタ
管路図設計支援方法、管路図設計支援装置および管路図設計支援プログラム
今日
株式会社クボタ
受口に挿口を挿入する管継手に用いられるシール材およびこのシール材を用いた管継手
今日
株式会社クボタ
メータパネル、情報表示システム、情報表示方法、コンピュータプログラムおよび作業車両
今日
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ