TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103914
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221639
出願日
2023-12-27
発明の名称
自動走行制御システムおよび作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】状況に応じて、効率的な旋回走行を優先させるか、効率的な作業走行を優先させるかを選択することを目的とする。
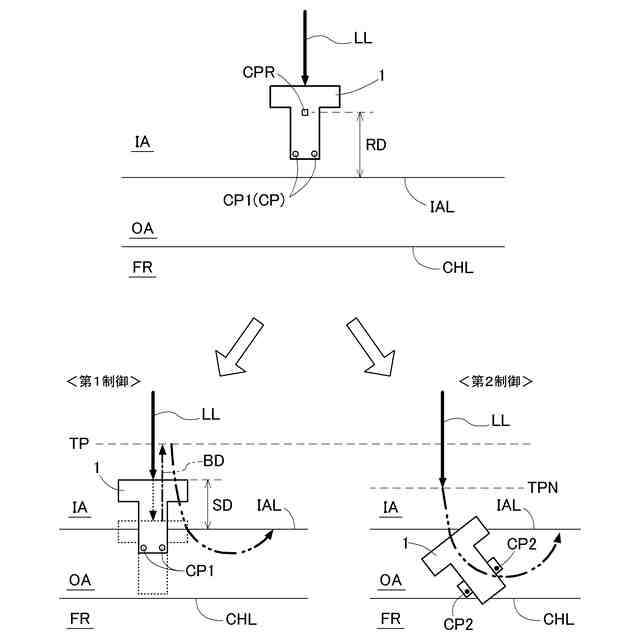
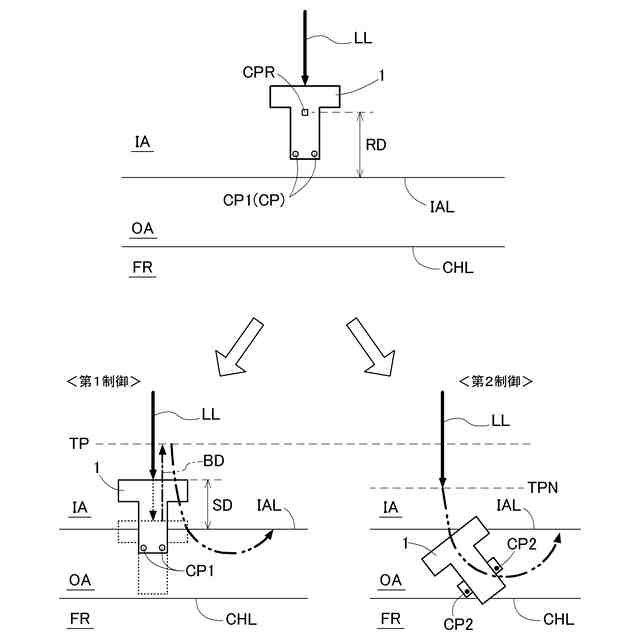
【解決手段】制御点のうちの少なくとも一部を第1制御点CP1および第2制御点CP2のいずれかに切り替える制御点切替部と、機体1の位置から目標走行経路の終端部までの距離が基準距離RD以下になると、第1制御を行うか第2制御を行うかの選択入力を受け付ける制御選択受付部とを備え、第1制御が選択されると、自動走行制御部は制御点CPとして第1制御点CP1に基づいて自動走行を制御し、第2制御が選択されると、制御点切替部は制御点CPを第2制御点CP2に切り替え、自動走行制御部は制御点CPとして第2制御点CP2に基づいて自動走行を制御し、第2制御点CP2は第1制御点CP1より機体1の後方に設けられる。
【選択図】図6
特許請求の範囲
【請求項1】
作業地を自動走行により往復走行しながら作業を行う作業車の自動走行制御システムであって、
前記作業地の境界に基づいて越境線を生成する越境線生成部と、
前記作業車の機体の位置に基づいて制御点を生成する制御点生成部と、
前記自動走行が行われる目標走行経路を生成する経路生成部と、
前記機体が前記目標走行経路に沿って走行し、かつ、前記制御点が前記越境線を超えないように前記自動走行を制御する自動走行制御部と、
前記制御点のうちの少なくとも一部を第1制御点および第2制御点のいずれかに切り替える制御点切替部と、
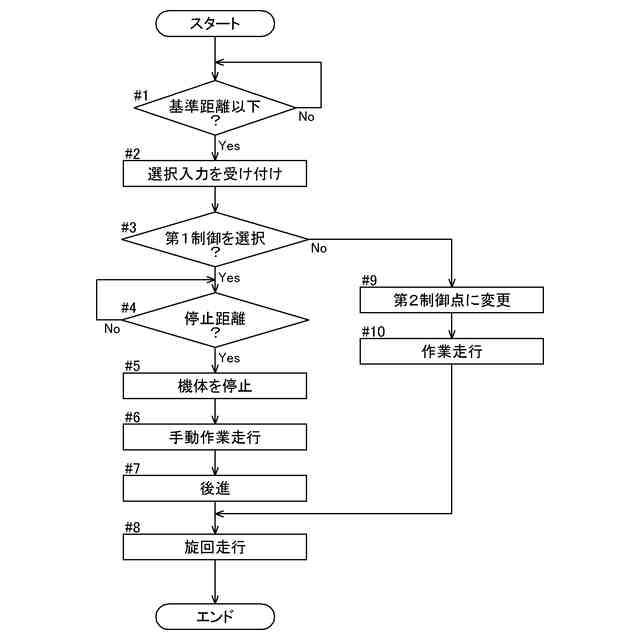
前記機体の位置から前記目標走行経路のうち前記往復走行が行われる内部領域と前記内部領域の外側の外周領域とに前記作業地が区分けされ、前記往復走行が行われる往復走行経路において当該往復走行経路の終端部までの距離が基準距離以下になると、第1制御を行うか第2制御を行うかの選択入力を受け付ける制御選択受付部とを備え、
前記第1制御が選択されると、前記自動走行制御部は前記制御点として前記第1制御点に基づいて前記自動走行を制御し、
前記第2制御が選択されると、前記制御点切替部は前記制御点を前記第2制御点に切り替え、前記自動走行制御部は前記制御点として前記第2制御点に基づいて前記自動走行を制御し、
前記第2制御点は前記第1制御点より前記機体の後方に設けられる自動走行制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記第1制御が選択されると、前記自動走行制御部は、前記終端部から前記基準距離より短い停止距離だけ手前の位置で前記機体を停止させる請求項1に記載の自動走行制御システム。
【請求項3】
前記第1制御点の前記作業地からの高さは、前記第2制御点の前記作業地からの高さより高い請求項1に記載の自動走行制御システム。
【請求項4】
前記作業地から所定の範囲内で外側の周囲領域は前記作業地より高く、
前記制御選択受付部は、前記周囲領域の前記作業地からの高さが前記第1制御点の前記作業地からの高さより低い場合にのみ前記選択入力を受け付け、
前記自動走行制御部は、前記第2制御が選択された場合以外は、前記第1制御点に基づいて前記自動走行を制御する請求項3に記載の自動走行制御システム。
【請求項5】
前記往復走行は複数の作業走行と2つの前記作業走行をつなぐ旋回走行とによって行われ、
前記選択入力は前記作業走行の前記目標走行経路である作業走行経路上で受け付けられ、
前記自動走行制御部は、前記旋回走行において、前記制御点が前記越境線を超えないように前記自動走行を制御する請求項1に記載の自動走行制御システム。
【請求項6】
前記自動走行制御部は、前記第1制御が選択されると、前記機体を所定の後進距離だけ後進させた後に前記旋回走行を行わせる請求項5に記載の自動走行制御システム。
【請求項7】
前記経路生成部は、前記目標走行経路として、前記作業走行経路を生成すると共に、前記外周領域を前記作業地の外周に沿って周回する周回経路を生成し、
人為操作に基づいて前記周回経路の周回数を選択する周回数選択部をさらに備え、
前記制御選択受付部は、前記周回数として1周が選択された場合にのみ前記選択入力を受け付ける請求項5に記載の自動走行制御システム。
【請求項8】
前記機体と、
衛星からの衛星信号を受信する衛星アンテナと、
前記衛星信号に基づいて測位データを出力する測位ユニットと、
前記測位データに基づいて前記機体の位置を算出する位置算出部と、
請求項1から7のいずれか一項に記載の自動走行制御システムとを備える作業車。
【請求項9】
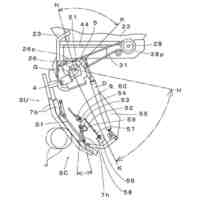
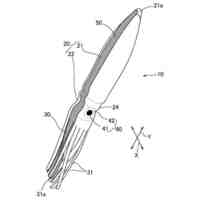
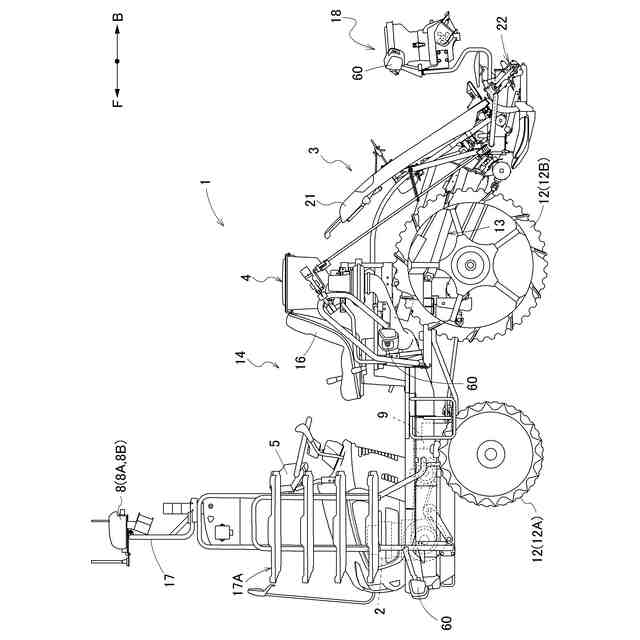
前記作業地である圃場に苗を受け付ける作業車であって、
前記機体に支持される前輪および後輪と、
前記前輪よりも前記機体の前方に設けられる予備苗収納装置とを備え、
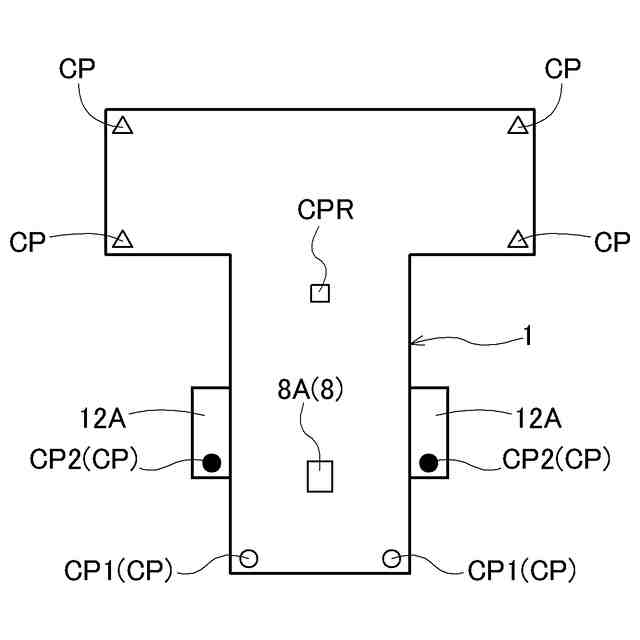
前記第1制御点は前記予備苗収納装置に設定され、
前記第2制御点は前記前輪に設定される請求項8に記載の作業車。
【請求項10】
前記経路生成部は、前記作業地の外形形状が矩形状でない場合に、前記前輪が前記作業地から外側にはみ出ないように前記往復走行における旋回経路を生成する請求項9に記載の作業車。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行により作業走行する作業車、および作業車の自動走行を制御する自動走行制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
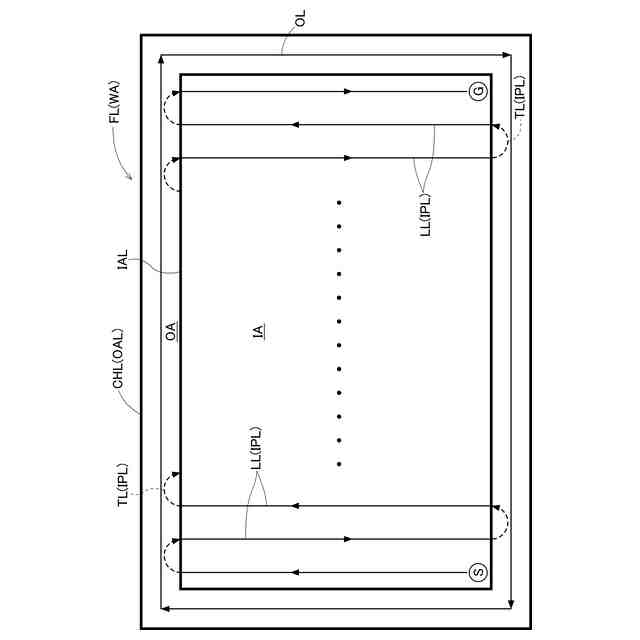
特許文献1に開示されるように、作業車は、目標走行経路に沿って圃場(作業地)の内部領域を自動走行で往復走行しながら作業を行う。往復走行では、内部領域の端部まで作業走行が行われ、内部領域の外側の外周領域で旋回走行が行われる。旋回走行では圃場の外側に畦等が存在する場合でも、機体が畦に衝突しないようにするために、機体が圃場からはみ出さないように目標走行経路が生成される。
【先行技術文献】
【特許文献】
【0003】
特開2023-090511号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、内部領域の外周辺から外周領域の外周辺までの距離(長さ)である外周領域の幅が狭い場合、外周領域から機体がはみ出さないように効率的に旋回が行えない場合がある。これに対処するために、適切な旋回を開始できる位置で作業走行を終了させて旋回走行を開始することもできるが、この場合、内部領域の端部まで作業走行を行うことができずに効率的な作業走行を行うことができない場合がある。そして、効率的に旋回走行を行うか、効率的に作業走行を行うかは、作業走行から旋回走行に移行する位置が決定される目標走行経路が生成された時点で決定され、作業地の状況等に応じて往復走行中に変更することができなかった。
【0005】
本発明は、状況に応じて、効率的な旋回走行を優先させるか、効率的な作業走行を優先させるかを選択することを目的とする。
【課題を解決するための手段】
【0006】
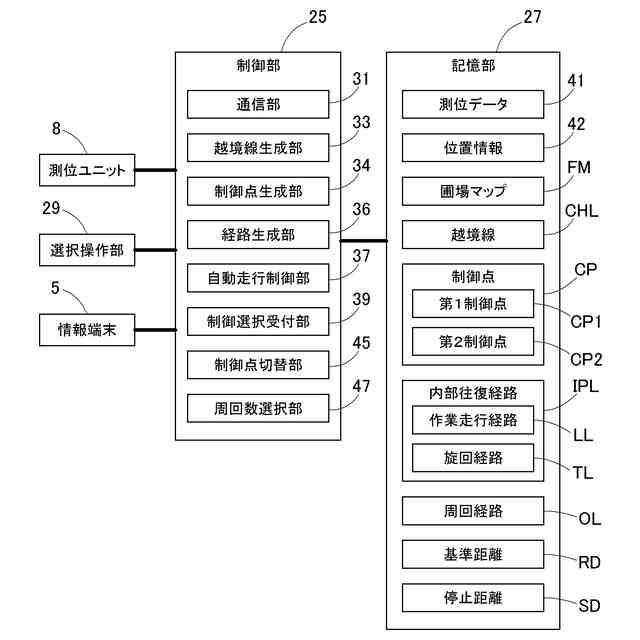
上記目的を達成するために、本発明の一実施形態に係る自動走行制御システは、作業地を自動走行により往復走行しながら作業を行う作業車の自動走行制御システムであって、前記作業地の境界に基づいて越境線を生成する越境線生成部と、前記作業車の機体の位置に基づいて制御点を生成する制御点生成部と、前記自動走行が行われる目標走行経路を生成する経路生成部と、前記機体が前記目標走行経路に沿って走行し、かつ、前記制御点が前記越境線を超えないように前記自動走行を制御する自動走行制御部と、前記制御点のうちの少なくとも一部を第1制御点および第2制御点のいずれかに切り替える制御点切替部と、前記機体の位置から前記目標走行経路のうち前記往復走行が行われる内部領域と前記内部領域の外側の外周領域とに前記作業地が区分けされ、前記往復走行が行われる往復走行経路において当該往復走行経路の終端部までの距離が基準距離以下になると、第1制御を行うか第2制御を行うかの選択入力を受け付ける制御選択受付部とを備え、前記第1制御が選択されると、前記自動走行制御部は前記制御点として前記第1制御点に基づいて前記自動走行を制御し、前記第2制御が選択されると、前記制御点切替部は前記制御点を前記第2制御点に切り替え、前記自動走行制御部は前記制御点として前記第2制御点に基づいて前記自動走行を制御し、前記第2制御点は前記第1制御点より前記機体の後方に設けられる。
【0007】
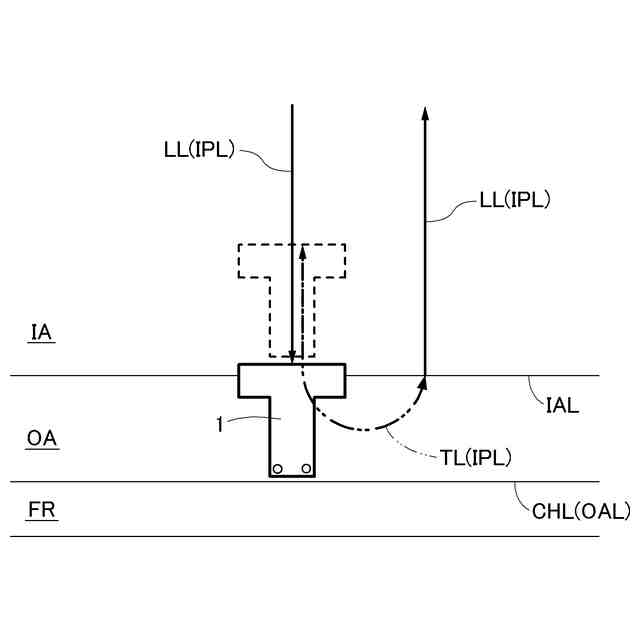
第1制御では、作業地の境界に基づいて生成される越境線を第1制御点が超えないように自動走行が制御されることにより、自動走行において機体が作業地からはみ出すことが抑制される。つまり、第1制御では、効率的に旋回走行を行うことができる。ただし、機体が作業地からはみ出さないように非作業走行である旋回走行を行うために、作業地の境界(越境線)から十分に離れた位置から旋回走行を開始させる必要があり、往復走行における作業走行を十分な位置まで行えない場合がある。
【0008】
ここで、旋回走行において、機体の一部が作業地の境界(越境線)からはみ出ても、走行に支障がない場合もある。このような場合、作業者(オペレータ)は、機体の一部が作業地の境界(越境線)からはみ出ても走行に支障がないか否かを判断できる場合が多い。
【0009】
作業者により第2制御が選択されることにより、第1制御点より機体の後方の第2制御点に制御点を変更することができる。制御点が第2制御点に変更されるため、機体の第2制御点より前側の領域が作業地の境界(越境線)を超えることが許容され、旋回走行を第1制御が行われる際より作業地の境界(越境線)に近い位置から開始することができる。その結果、第2制御が選択されることにより、第1制御が行われる際より作業地の境界(越境線)に近い位置まで作業走行を行い、作業効率を向上させることができる。
【0010】
このように、上記構成によると、目標走行経路の終端部に近づいた段階で、第1制御を行うか第2制御を行うかの作業者による選択入力を受け付けることにより、効率的な旋回走行を優先させるか、効率的な作業走行を優先させるかを選択することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
今日
株式会社クボタ
作業機
6日前
株式会社クボタ
トラクタ
今日
株式会社クボタ
トラクタ
今日
株式会社クボタ
圃場作業機
1日前
株式会社クボタ
農機支援装置、マップ作成方法及びコンピュータプログラム
7日前
株式会社クボタケミックス
排水配管継手
7日前
個人
ルアー
9日前
個人
播種装置
6日前
個人
釣り用ルアー
1か月前
個人
釣り用ルアー
1か月前
個人
プランターセット
13日前
個人
養殖システム
1日前
個人
生命力近親交配方法
13日前
個人
獣捕獲罠装置
16日前
株式会社アテックス
草刈機
21日前
株式会社シマノ
釣竿
20日前
株式会社シマノ
釣竿
2日前
個人
ペット用オムツカバー
20日前
個人
植物栽培装置
22日前
井関農機株式会社
歩行型管理機
1か月前
個人
漁業支援装置及び方法
7日前
ウエダ産業株式会社
切断装置
2日前
株式会社パクマケ
植栽用遮光板
28日前
株式会社フルトン
水中捕捉装置
21日前
松山株式会社
草刈作業機
1か月前
株式会社村岡水産
釣り用ワーム
1か月前
花王株式会社
抗菌剤組成物
1か月前
井関農機株式会社
水田引水管理システム
1か月前
鹿島建設株式会社
レインガーデン
10日前
個人
害虫捕獲、解放及び駆除装置
16日前
個人
落口枡用取付部材及び落口枡
10日前
株式会社泰
愛玩動物用タワー家具
23日前
有限会社マドネスジャパン
ポッパー
1か月前
株式会社ササキコーポレーション
農作業機
8日前
OTIS株式会社
ルアー用スカート
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ