TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115773
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010411
出願日
2024-01-26
発明の名称
農機支援装置、マップ作成方法及びコンピュータプログラム
出願人
株式会社クボタ
代理人
個人
,
個人
主分類
G05D
1/622 20240101AFI20250731BHJP(制御;調整)
要約
【課題】障害物を認識しやすい圃場のマップを作成することができる農機支援装置、マップ作成方法及びコンピュータプログラムを提供する。
【解決手段】農機支援装置は、圃場を走行する農機の位置を取得し、取得した前記位置に基づいて、前記圃場のマップを作成し、障害物の登録要求を受け付けた場合、前記登録要求の受付時に取得した前記位置を前記障害物に紐づけて前記マップに登録する。
【選択図】図14
特許請求の範囲
【請求項1】
圃場を走行する農機の位置を取得し、
取得した前記位置に基づいて、前記圃場のマップを作成し、
障害物の登録要求を受け付けた場合、前記登録要求の受付時に取得した前記位置を前記障害物に紐づけて前記マップに登録する
農機支援装置。
続きを表示(約 830 文字)
【請求項2】
前記登録要求を受け付ける受付部が前記登録要求を受け付けた場合、前記農機の位置を登録する
請求項1に記載の農機支援装置。
【請求項3】
作成された前記マップを表示し、登録された前記位置に対応する前記マップの部分に前記障害物を表示する
請求項1又は2に記載の農機支援装置。
【請求項4】
前記マップの作成後に前記農機が前記圃場を走行する場合であって、登録された前記位置と、前記農機の所在位置との間の距離が所定距離以下になった場合、前記障害物に接近したことを表示する
請求項1又は2に記載の農機支援装置。
【請求項5】
前記障害物の寸法を登録する
請求項1又は2に記載の農機支援装置。
【請求項6】
前記登録要求は登録開始要求及び登録終了要求を含み、
前記登録開始要求の受付時における前記農機の第1位置と、前記登録終了要求の受付時における前記農機の第2位置とに基づいて定まる前記障害物の寸法を登録する
請求項5に記載の農機支援装置。
【請求項7】
前記農機に対する前記障害物の相対位置を登録する
請求項1又は2に記載の農機支援装置。
【請求項8】
前記相対位置を受け付ける相対位置受付部にて受け付けた前記相対位置を登録する
請求項7に記載の農機支援装置。
【請求項9】
前記圃場の周縁部に沿う時計回り及び反時計回りを含む前記農機の走行方向を登録し、
登録された前記走行方向に基づく前記相対位置を登録する
請求項7に記載の農機支援装置。
【請求項10】
前記障害物の種類を受け付けた場合、前記障害物の種類を前記位置に紐づけて、前記マップを作成する
請求項1又は2に記載の農機支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本技術は、圃場のマップを作成するための農機支援装置、マップ作成方法及びコンピュータプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
作業車両、例えば農機の自動走行支援装置が提案されている。農機は畦に沿って圃場を周回する。自動走行支援装置は、測位装置によって測定された農機の位置と、基準位置とに基づいて、圃場の輪郭を圃場のマップとして登録する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-118020号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
畦には、農機の作業に障害を生じさせるおそれのある物体(障害物)がある場合がある。
【0005】
本開示は斯かる事情に鑑みてなされたものであり、障害物を認識しやすい圃場のマップを作成することができる農機支援装置、マップ作成方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る農機支援装置は、圃場を走行する農機の位置を取得し、取得した前記位置に基づいて、前記圃場のマップを作成し、障害物の登録要求を受け付けた場合、前記登録要求の受付時に取得した前記位置を前記障害物に紐づけて前記マップに登録する。
【0007】
本開示の一実施形態に係るマップ作成方法は、圃場を走行する農機の位置を取得し、前記位置に基づいて、前記圃場のマップを作成し、障害物の登録要求を受け付けた場合、前記登録要求の受付時に取得された前記位置を前記障害物に紐づけて前記マップに登録する。
【0008】
本開示の一実施形態に係るコンピュータプログラムは、圃場を走行する前記農機の位置を取得し、前記位置に基づいて、前記圃場のマップを作成し、障害物の登録要求を受け付けた場合、前記登録要求の受付時に取得された前記位置を前記障害物に紐づけて前記マップに登録する。
【発明の効果】
【0009】
本開示の一実施形態に係る農機支援装置、マップ作成方法及びコンピュータプログラムにあっては、例えばマップの作成中に障害物の登録要求を受け付け、受付時に取得した農機の位置を障害物に紐づけてマップに登録する。そのため、障害物の位置をマップ上に表示させることができる。
【図面の簡単な説明】
【0010】
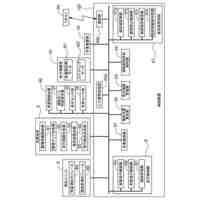
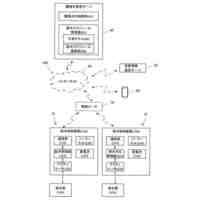
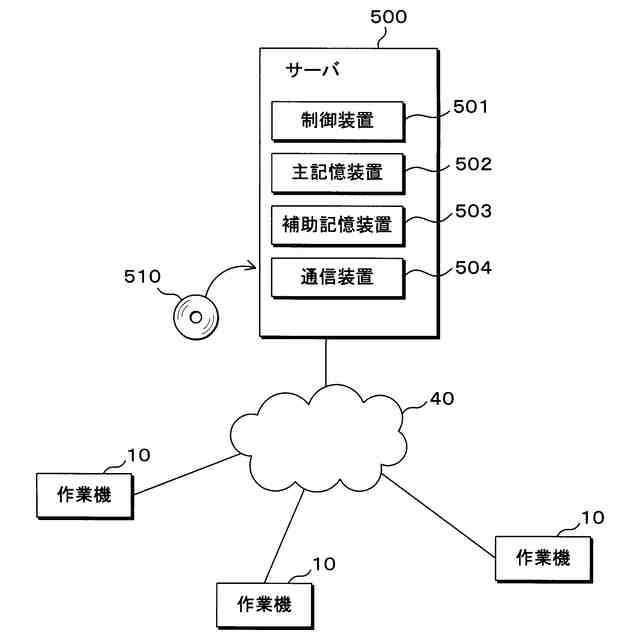
農業支援システムのブロック図である。
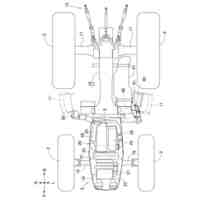
作業機の一例を示す模式的側面図である。
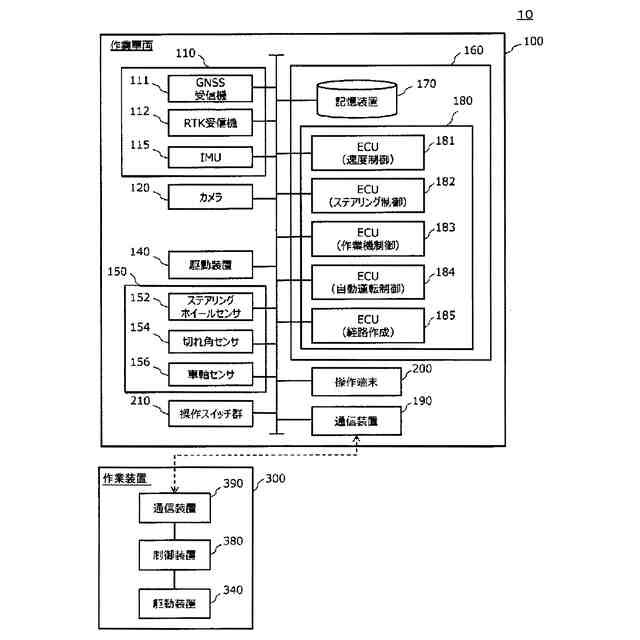
作業車両及び作業装置の構成例を示すブロック図である。
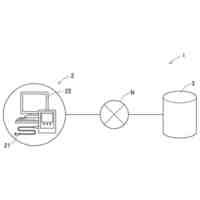
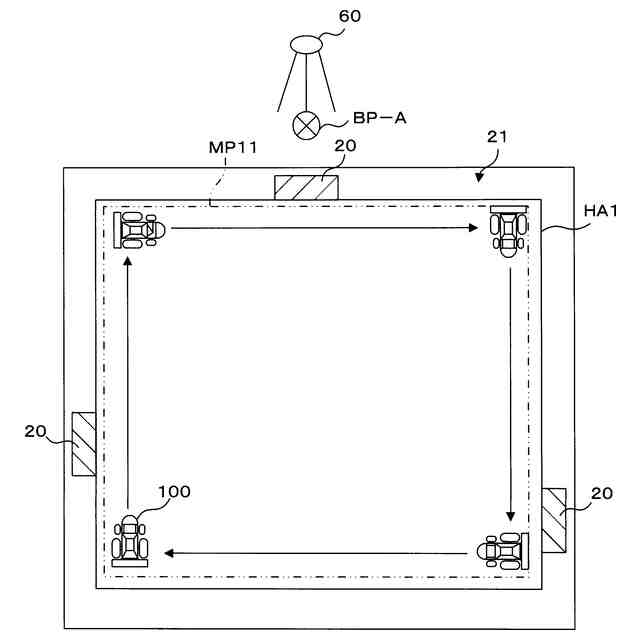
RTK-GNSSによる測位を行う作業車両の一例を示す概念図である。
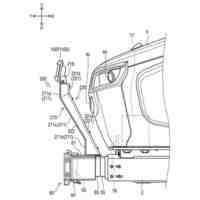
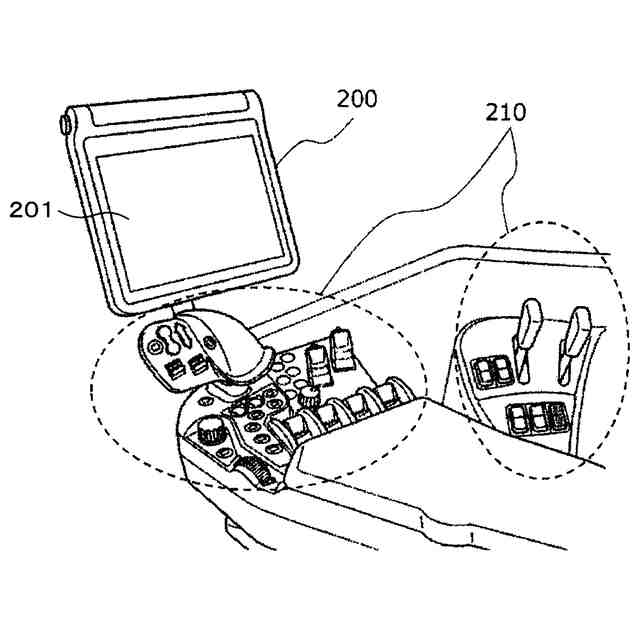
キャビンの内部に設けられる操作端末および操作スイッチ群の例を示す模式図である。
圃場、圃場マップ、障害物及び畦を示す模式的平面図である。
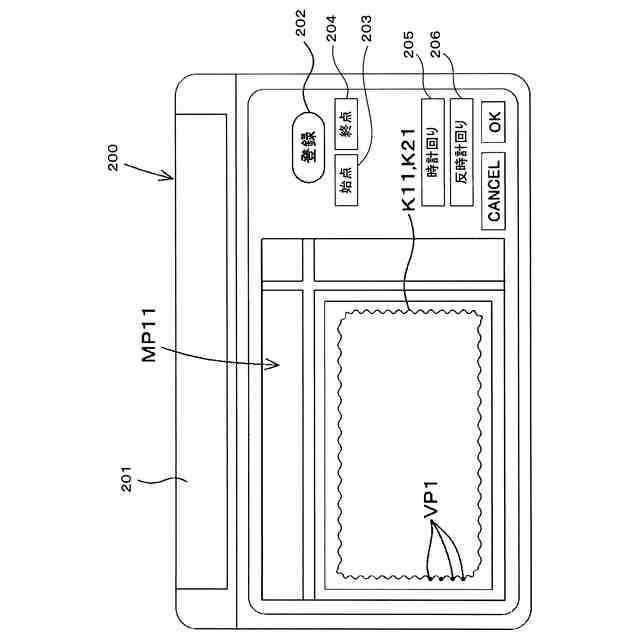
表示部に表示されるマップ登録画面の一例を示す図である。
走行軌跡から圃場の輪郭を求める図である。
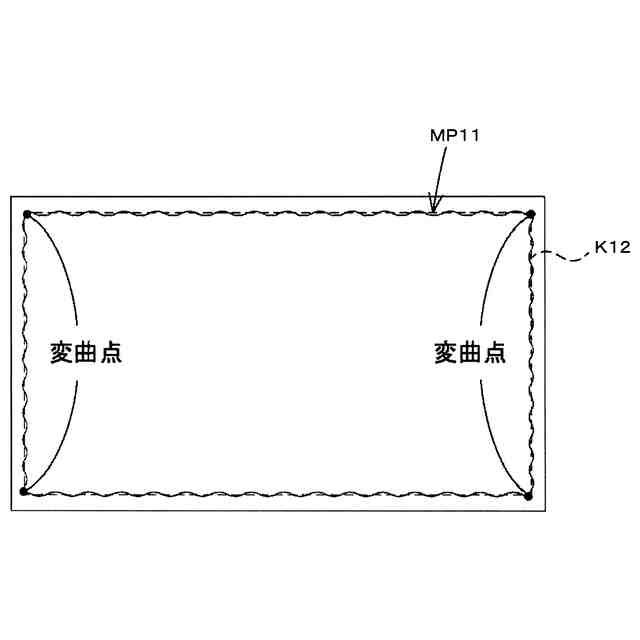
走行軌跡の変曲点から圃場の輪郭を求める図である。
走行時のスイッチ操作から輪郭を求める図である。
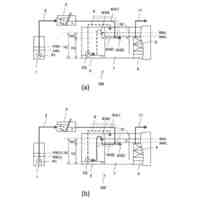
圃場、作業車両及び障害物の模式的部分拡大平面図である。
圃場、作業車両及び障害物の模式的部分拡大平面図である。
障害物の種類を入力するための各ボタンを表示する表示部の模式的部分拡大図である。
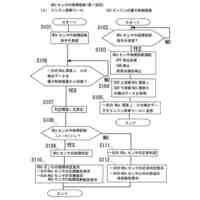
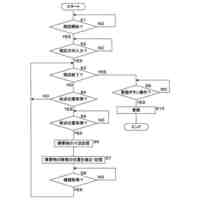
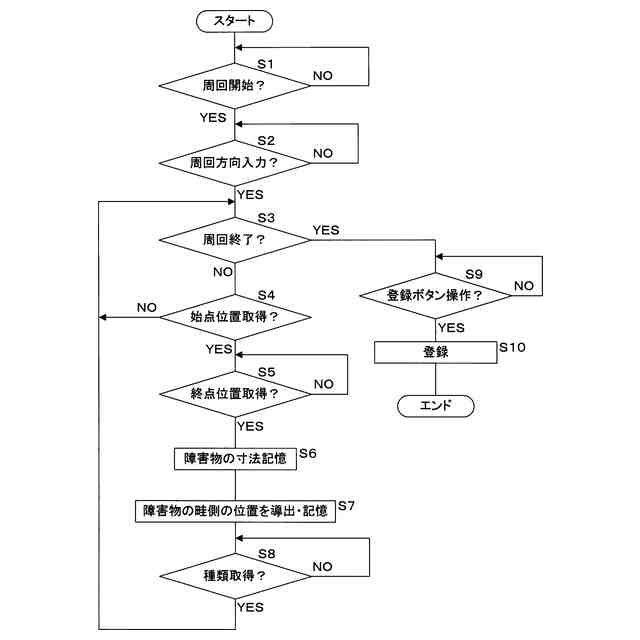
ECUによる圃場マップ作成処理及び障害物登録処理を説明するフローチャートである。
障害物を登録した圃場マップ、走行予定ルートなどを表示する表示部の部分拡大図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
17日前
株式会社クボタ
作業機
23日前
株式会社クボタケミックス
伸縮継手
4日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
トラクタ
17日前
株式会社クボタ
トラクタ
17日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
圃場作業機
18日前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
汚水処理装置
1か月前
株式会社クボタケミックス
管路更生工法および管更生部材
13日前
株式会社クボタケミックス
管路更生工法および管更生部材
13日前
株式会社クボタ
エンジン及びエンジンの診断方法
1か月前
株式会社クボタ
判定方法、判定システム、および判定プログラム
9日前
株式会社クボタ
作業機
5日前
株式会社クボタ
農作業車
1か月前
株式会社クボタ
農機支援装置、マップ作成方法及びコンピュータプログラム
24日前
株式会社クボタケミックス
排水配管構造
11日前
株式会社クボタケミックス
圃場水管理装置、圃場水管理システム、および圃場水管理方法
1か月前
株式会社クボタケミックス
排水配管継手
24日前
株式会社クボタ
高さを設定可能な車軸の移動を検出するためのセンサを含む作業車
6日前
株式会社クボタ
作業機の支援システム、及び作業機の支援方法
1か月前
株式会社クボタケミックス
下水道管用のリブ付き継手のための樹脂組成物およびリブ付き継手
1か月前
個人
生産早送り装置
19日前
株式会社豊田自動織機
産業車両
9日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
3日前
個人
作業車両自動化システム
25日前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
23日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ