TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107313
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2025075552,2023140166
出願日
2025-04-30,2020-01-14
発明の名称
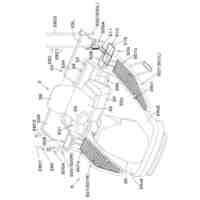
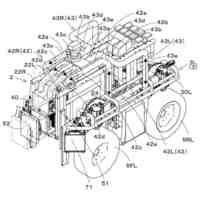
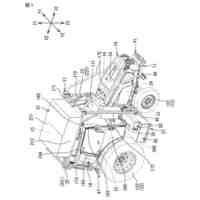
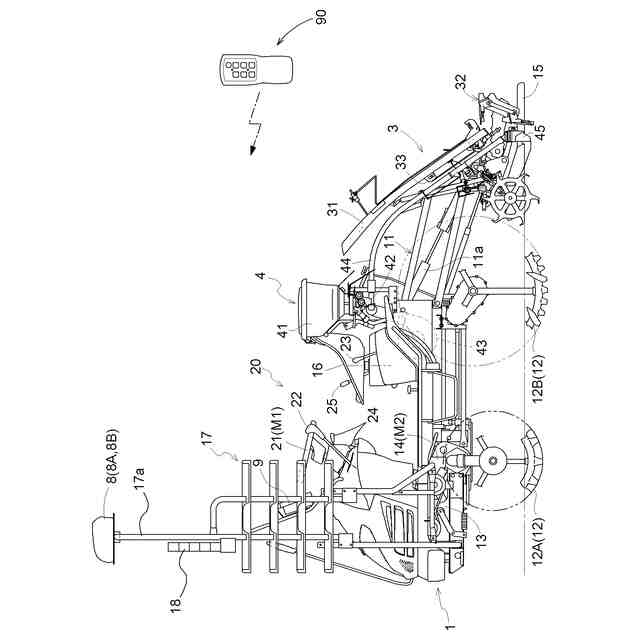
農作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250710BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行での旋回走行において、機体が境界線を超えることで機体が緊急停止するような事態を回避できる農作業車の提供。
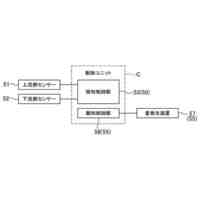
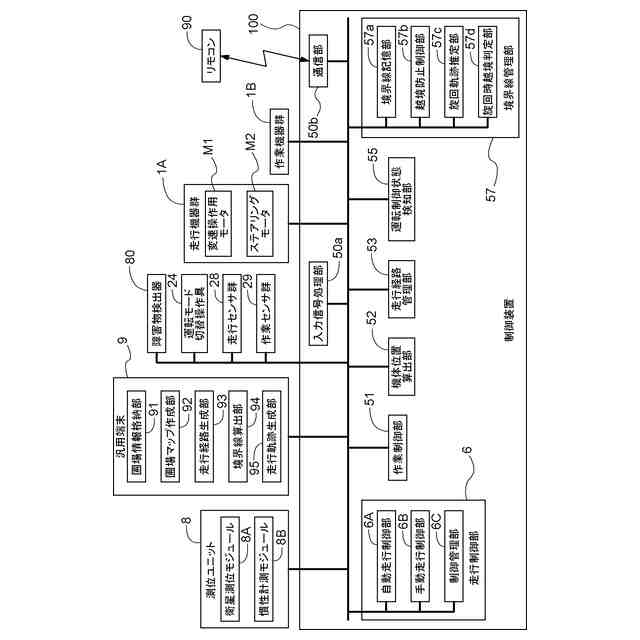
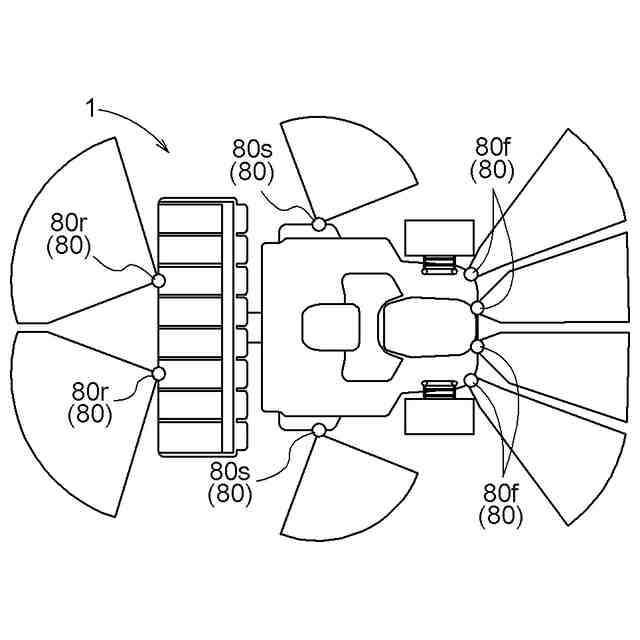
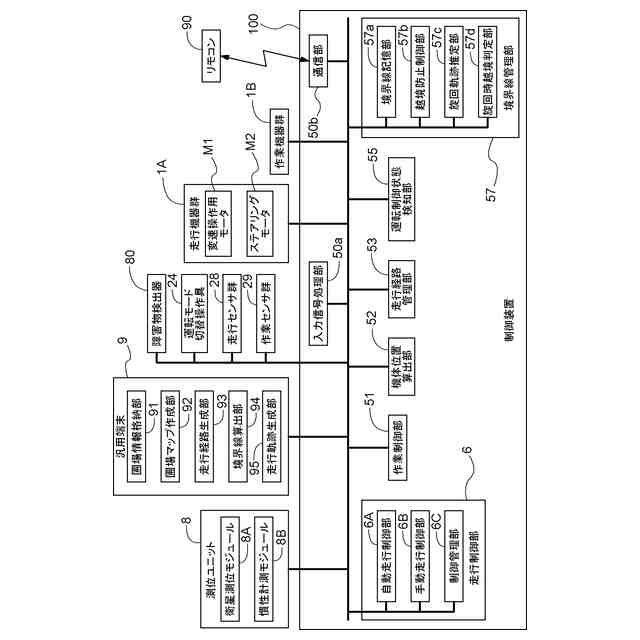
【解決手段】農作業車は、境界物によって境界付けられた圃場面での機体の位置である機体位置を算出する機体位置算出部52と、機体と境界物との接触を避けるために設定された境界線と機体位置とに基づいて、機体が境界線を越える走行を禁止する越境防止制御部57bと、機体の旋回走行時の軌跡である旋回軌跡を推定する旋回軌跡推定部57cと、推定された旋回軌跡に基づいて実際の旋回走行で機体が境界線を越えるかどうかを判定する旋回時越境判定部57dとを備える。
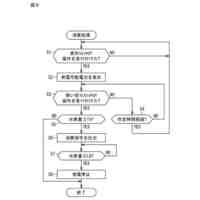
【選択図】図7
特許請求の範囲
【請求項1】
境界物によって境界付けられた圃場面を走行する自動走行可能な農作業車であって、
前記圃場面での機体の位置である機体位置を算出する機体位置算出部と、
前記機体と前記境界物との接触を避けるために設定された境界線と前記機体位置とに基づいて、前記機体が前記境界線を越える走行を禁止する越境防止制御部と、
前記機体の旋回走行時の軌跡である旋回軌跡を推定する旋回軌跡推定部と、
推定された前記旋回軌跡に基づいて実際の旋回走行で前記機体が前記境界線を越えるかどうかを判定する旋回時越境判定部と、を備える農作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、境界物によって境界付けられた圃場面を走行する自動走行可能な農作業車に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1による農作業車は、衛星測位システムを用いて走行機体の位置を検出する計測装置と、設定された作業走行ラインに沿って走行機体を自動走行させる自動走行制御部と、圃場面と畦との間の境界線である畦際ラインに走行機体が接近すると走行機体を停止させる自動減速部とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2018-117559号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
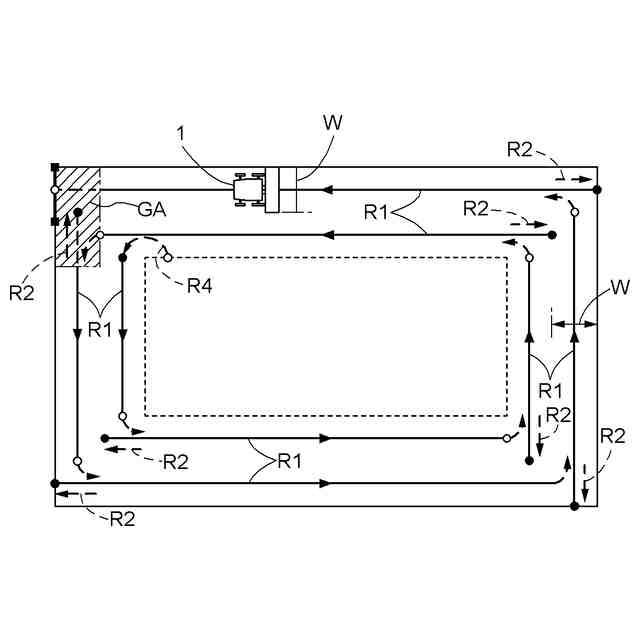
農作業車は、畔などの境界物によって境界付けられた圃場全体を走行するために、境界物に向かう前進走行と、境界物に接近した場合に行われる旋回走行(方向転換走行)とを繰り返す。旋回走行の場合、旋回の開始タイミングや圃場の路面状態や旋回時車速などにより、想定されている旋回軌跡とは異なる旋回軌跡で機体が旋回することがある。特許文献1のような自動走行される農作業車が、境界線の近くで旋回走行する場合、機体が想定されている旋回軌跡より境界線寄りに旋回すると、機体の位置が境界線に達し、機体が緊急停止する。自動走行中に機体が緊急停止すると、手動運転に切り換えられ、手動で境界線を越えないような旋回走行を行う必要がある。このような越境回避旋回走行は手間がかかるため、作業が遅延する。
【0005】
このため、自動走行での旋回走行において、機体が境界線を超えることで機体が緊急停止するような事態をできるだけ回避できる農作業車が要望されている。
【課題を解決するための手段】
【0006】
本発明による農作業車は、境界物によって境界付けられた圃場面を自動走行で走行可能であり、前記圃場面での機体の位置である機体位置を算出する機体位置算出部と、前記機体と前記境界物との接触を避けるために設定された境界線と前記機体位置とに基づいて、前記機体が前記境界線を越える走行を禁止する越境防止制御部と、前記機体の旋回走行時の軌跡である旋回軌跡を推定する旋回軌跡推定部と、推定された前記旋回軌跡に基づいて実際の旋回走行で前記機体が前記境界線を越えるかどうかを判定する旋回時越境判定部とを備える。
【0007】
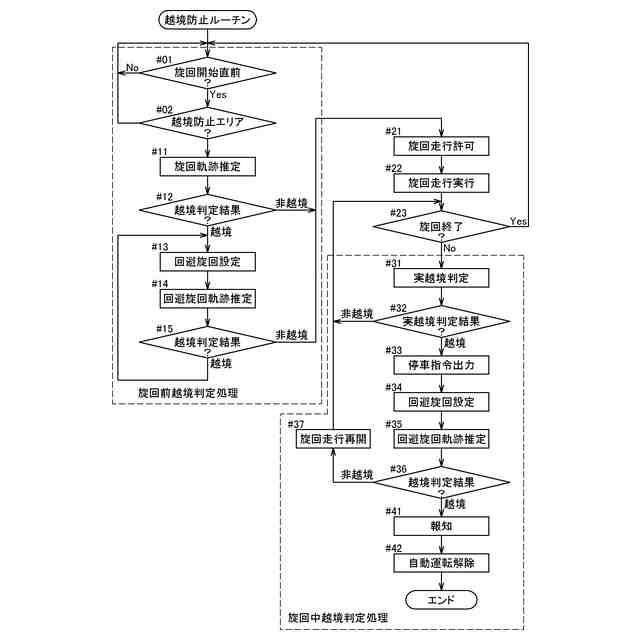
この構成によれば、機体が旋回走行する際には、予めその旋回走行での旋回軌跡が推定されるので、その推定された旋回軌跡に基づいて、実際の旋回走行で前記機体が前記境界線を越えるかどうかが判定される。旋回軌跡推定部による旋回軌跡の推定及び旋回時越境判定部による判定は、実際の旋回走行の前、及び実際の旋回走行の途中のいずれか、あるいはその両方で行うことが可能である。境界線を越えるとの判定結果が出た場合には、越境防止制御部によって機体の走行が禁止される前に、リカバリー処置が行われる。このリカバリー処理は、手動または自動のどちらでも可能である。そのようなリカバリー処置は、越境防止制御部によって機体の走行が禁止されてから行われることに比べて、容易であるだけでなく、時間的なロスも少なくなる利点が得られる。
【0008】
リカバリー処理としては、機体が境界線を越えてしまう前に、予定されている旋回走行を取り止めて旋回走行開始点の移動や旋回半径の変更などによる越境回避旋回走行を行うことである。従って、本発明の好適な実施形態の1つでは、前記旋回時越境判定部によって前記機体が前記境界線を越えると判定された場合、越境回避旋回走行が行われる。
【0009】
越境回避旋回走行の一例は、予定されている旋回走行の操舵角が最大操舵角未満であれば、最大操舵角を用いた旋回走行での旋回軌跡を推定し、その推定された旋回軌跡に基づく旋回時越境判定の結果が良ければ、最大操舵角での旋回走行によって境界線越えを回避することができる。従って、本発明の好適な実施形態の1つでは、前記越境回避旋回走行には、最大操舵角での旋回走行が含まれる。より確実に境界線越えを回避するには、一般に切り返し走行と呼ばれている後進を用いた方向転換走行(旋回走行に一種)が好適である。このことから、本発明の好適な実施形態の1つでは、前記越境回避旋回走行に後進が含まれる。
【0010】
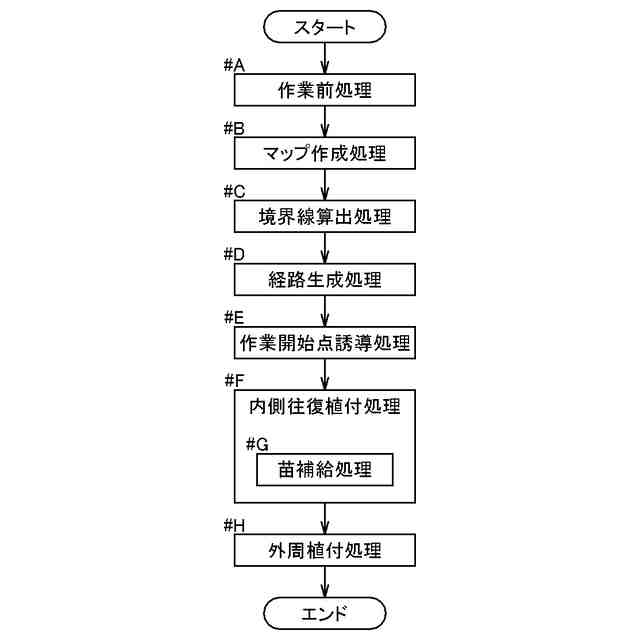
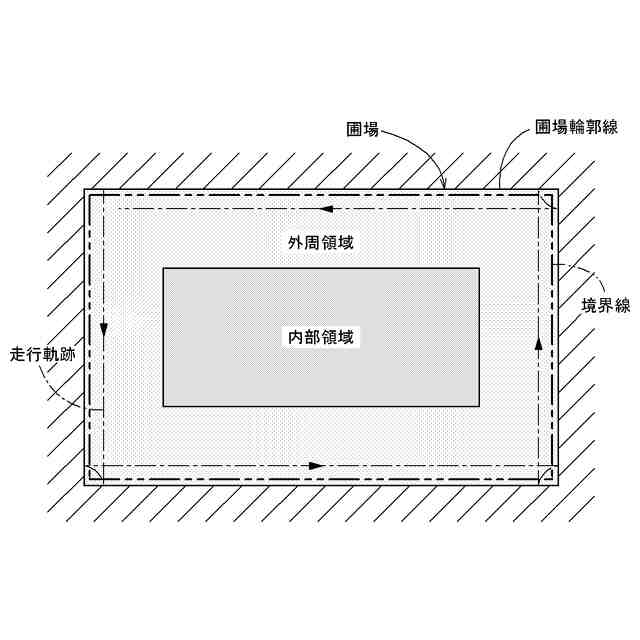
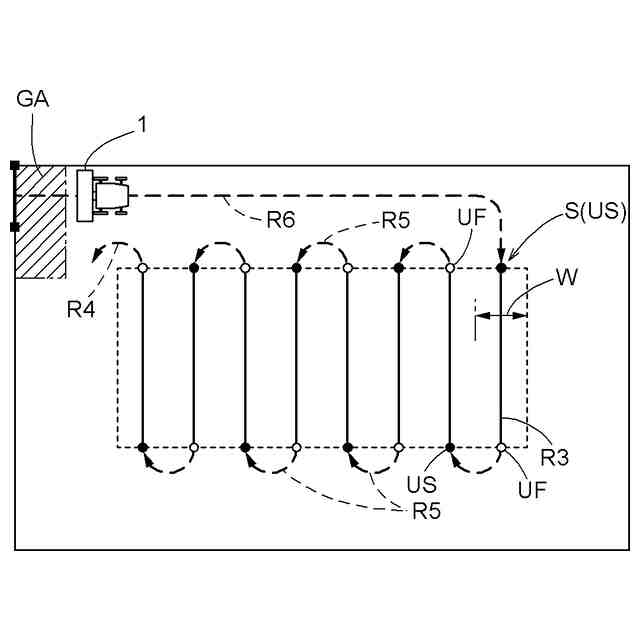
農作業車による圃場における多くの農作業では、作業対象となる圃場面は、外周領域とこの外周領域の内側に位置する内部領域とに分けられ、内部領域の作業は、作業を行う直進走行と方向転換のために作業を行わない旋回走行(主にUターン走行)との繰り返しで行われる。このことから、内部領域での直進走行から外周領域での旋回走行に移行する前に、機体が一時停止するように制御されることが少なくない。このような制御を利用すべく、本発明の好適な実施形態の1つでは、前記圃場面は、前記境界線に沿った外周領域と前記外周領域の内側に位置する内部領域とに分けられ、前記内部領域での自動走行作業が、前記内部領域での直進走行と前記外周領域での前記旋回走行とを繰り返しによって行われ、前記直進走行から前記旋回走行への移行時に前記機体の一時停止が行われ、前記一時停止の間に、前記旋回軌跡を推定と旋回時越境判定とが行われる。これにより、直進走行から旋回走行への移行時に発生する機体の一時停止が有効利用できる。なお、本願発明において用いられている直進走行なる語句は、直線走行のみを意味するわけではなく、大きな曲率半径でもって湾曲する湾曲走行なども含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
1か月前
株式会社クボタ
作業機
3日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
13日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業機械
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業装置
1か月前
株式会社クボタ
作業機械
1か月前
株式会社クボタ
作業車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ