TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103913
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221638
出願日
2023-12-27
発明の名称
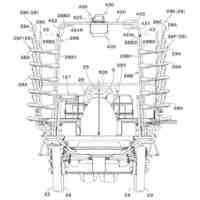
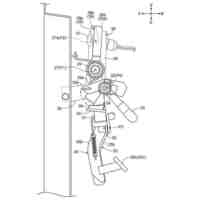
自動走行制御システム、及び圃場作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
B60W
30/00 20060101AFI20250702BHJP(車両一般)
要約
【課題】圃場作業車が圃場に設定された補給辺で資材補給のために停車したことを推定して、自動的にエンジンを一時停止する技術を提供する。
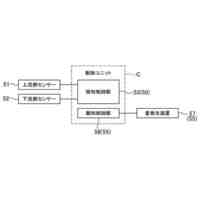
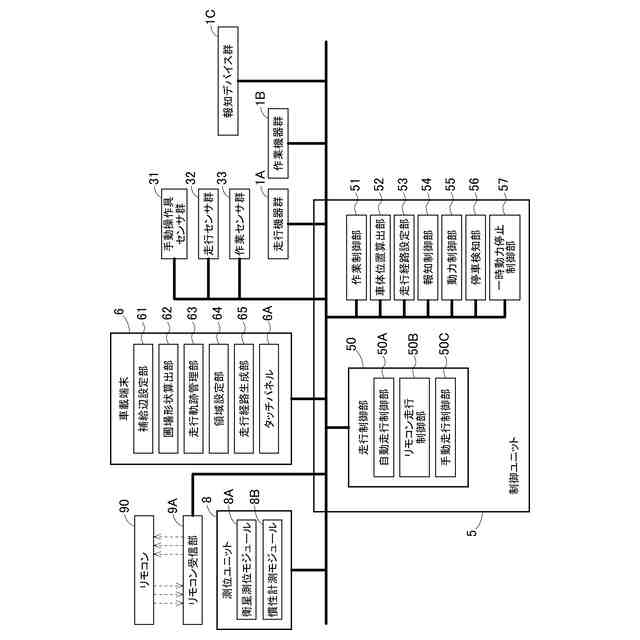
【解決手段】圃場作業車の自動走行制御システムは、圃場の外周領域に設定された周回走行経路と、内部領域に設定された内部経路と旋回経路とからなる往復走行経路とに沿って走行し、圃場作業車の動力部の駆動を制御する動力制御部55と、境界辺の少なくとも1つの辺を作業走行において必要な資材を補給する補給辺として設定する補給辺設定部61と、補給辺に隣接する特殊領域での圃場作業車の設定時間以上の停車を特殊停車として検知する停車検知部56と、特殊停車を一時動力停止条件の1つとする一時動力停止条件が満たされた場合、動力部の駆動を一時的に停止させる一時動力停止指令を動力制御部55に発令する一時動力停止制御部57を備える。
【選択図】図3
特許請求の範囲
【請求項1】
圃場の境界辺に沿う外周領域に設定された周回走行経路と、前記外周領域の内側の内部領域に設定された内部経路と旋回経路とからなる往復走行経路とに沿って走行する圃場作業車の自動走行制御システムであって、
前記圃場作業車の動力部の駆動を制御する動力制御部と、
前記境界辺の少なくとも1つの辺を作業走行において必要な資材を補給する補給辺として設定する補給辺設定部と、
前記補給辺に隣接する特殊領域での前記圃場作業車の設定時間以上の停車を特殊停車として検知する停車検知部と、
前記特殊停車を一時動力停止条件の1つとする前記一時動力停止条件が満たされた場合、前記動力部の駆動を一時的に停止させる一時動力停止指令を前記動力制御部に発令する一時動力停止制御部と、
を備える自動走行制御システム。
続きを表示(約 630 文字)
【請求項2】
前記特殊領域は、前記境界辺に沿って設けられた、前記圃場作業車の自動走行が許可される走行許可線と、前記境界辺との間の領域であり、かつ前記圃場作業車が前記境界辺を形成する境界物と接触しない領域である請求項1に記載の自動走行制御システム。
【請求項3】
前記走行許可線は可変であり、前記圃場作業車のサイズによって自動調整される請求項2に記載の自動走行制御システム。
【請求項4】
前記一時動力停止条件に、前記圃場作業車が前記補給辺に向いた前進姿勢であることが含まれている請求項1に記載の自動走行制御システム。
【請求項5】
前記一時動力停止指令によって一時停止した前記動力部が再び駆動した場合、前記圃場作業車が前記特殊領域から一度出ない限り、前記一時動力停止制御部は前記一時動力停止指令を発令しない請求項1に記載の自動走行制御システム。
【請求項6】
前記圃場作業車を無人で自動走行させる無人自動走行モードと、前記圃場作業車を有人で自動走行させる有人自動走行モードと、前記圃場作業車を遠隔走行させる遠隔走行モードとを有し、前記無人自動走行モードまたは前記遠隔走行モードが設定されている場合にのみ、前記一時動力停止制御部が機能する請求項1に記載の自動走行制御システム。
【請求項7】
請求項1から6のいずれか一項に記載の自動走行制御システムを備えた圃場作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場に設定された走行経路に沿って自動走行する圃場作業車、及びそのような圃場作業車のための自動走行制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、エンジン一時停止条件が満たされるとエンジンを一時的に停止させることができる圃場作業車としての乗用型田植機が開示されている。エンジン一時停止条件の条件要素には、変速レバーが中立位置に保持されること、ブレーキが作動していること、エンジンがアイドリング回転であること、苗載せ台の苗残量が所定以下になっていること、運転者が運転座席に着座していないこと、などが含まれている。このようなエンジン一時停止条件の要素の少なくとも1つ、あるいはその組み合わせが、所定時間を超えて成立していれば、エンジン一時停止処理が実行される。
【先行技術文献】
【特許文献】
【0003】
特開2019-172159号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された圃場作業車では、エンジン一時停止条件の条件事象として、圃場作業車が通常の停車を必要となる事象が挙げられているだけであり、このようなエンジン一時停止条件では、特別な事象におけるエンジン一時停止が効果的に行われない。
【0005】
上記実情に鑑み、本発明の目的は、圃場作業車が圃場に設定された補給辺で資材補給のために停車したことを推定して、自動的にエンジンを一時停止する技術を提供することである。
【課題を解決するための手段】
【0006】
圃場の境界辺に沿う外周領域に設定された周回走行経路と、前記外周領域の内側の内部領域に設定された内部経路と旋回経路とからなる往復走行経路とに沿って走行する、本発明による、圃場作業車の自動走行制御システムは、前記圃場作業車の動力部の駆動を制御する動力制御部と、前記境界辺の少なくとも1つの辺を作業走行において必要な資材を補給する補給辺として設定する補給辺設定部と、前記補給辺に隣接する特殊領域での前記圃場作業車の設定時間以上の停車を特殊停車として検知する停車検知部と、前記特殊停車を一時動力停止条件の1つとする前記一時動力停止条件が満たされた場合、前記動力部の駆動を一時的に停止させる一時動力停止指令を前記動力制御部に発令する一時動力停止制御部を備える。
【0007】
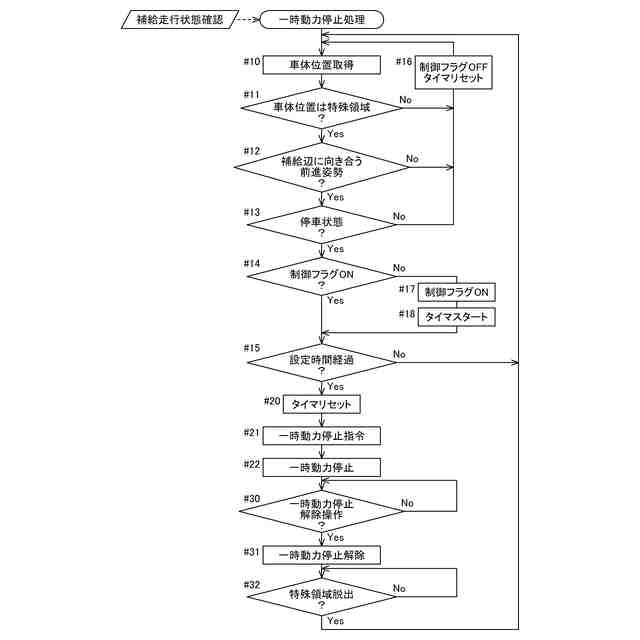
この構成によれば、停車検知部が、補給辺に隣接する特殊領域での圃場作業車の設定時間以上の停車を特殊停車として検出すると、この特殊停車は、補給辺で資材を補給するための停車とみなされる。つまり、資材を圃場作業車に積み込むために必要な相当な時間だけ、圃場作業車は停車しているとみなされ、一時動力停止が実行される。これにより、不要な動力部(エンジンや電動モータ)の動作に伴う不経済が回避される。
【0008】
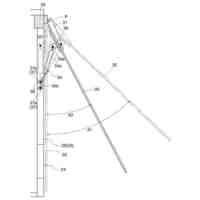
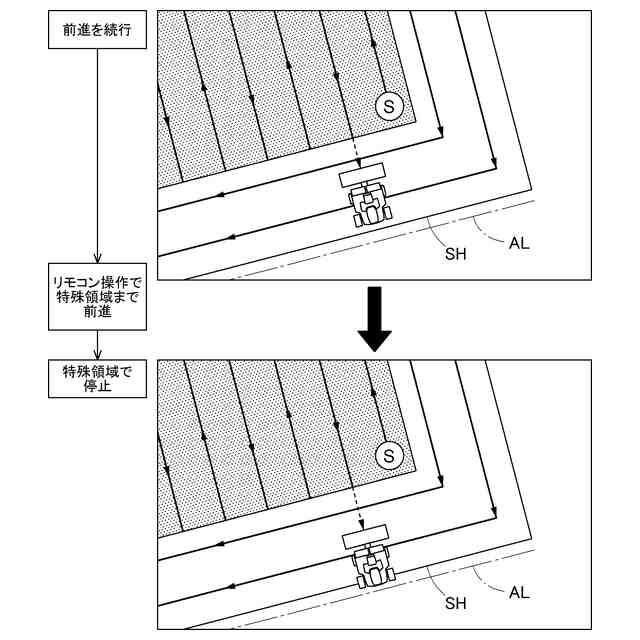
圃場作業車の停車が補給辺で資材を補給するための停車であると正確に推定するためには、特殊停車とみなされるための停車領域である特殊領域が、適切に定めることが重要である。資材補給のためには、圃場の境界辺との間に距離をとって設定されている作業走行経路を外れて、補給辺に接近走行する必要がある。したがって、作業走行経路から外れて境界辺に向かう圃場作業車が通過する領域が存在し、当該領域に特殊領域が含まれている。このことから、本発明では、前記特殊領域は、前記境界辺に沿って設けられた、前記圃場作業車の自動走行が許可される走行許可線と、前記境界辺との間の領域であり、かつ前記圃場作業車が前記境界辺を形成する境界物と接触しない領域であることが提案される。特殊領域をこのように限定することにより、補給辺での資材補給停車をより確実に推定することができる。
【0009】
走行許可線は、圃場作業車が境界辺を形成する境界物と接触しないように走行するために設定された線であるので、圃場作業車のサイズによって調整されることが適切であり、その変更は自動調整されることが好ましい。このことから、本発明では、前記走行許可線は可変であり、前記圃場作業車のサイズによって自動調整される。
【0010】
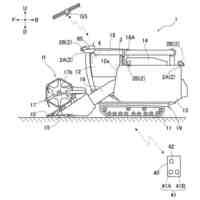
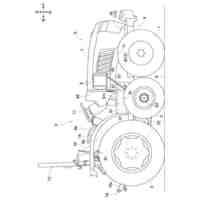
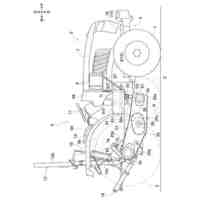
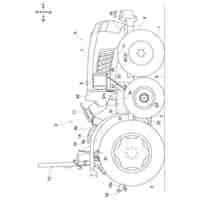
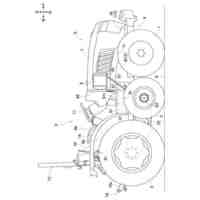
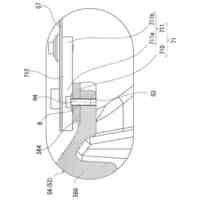
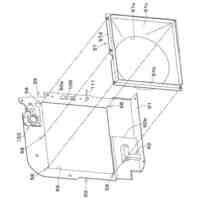
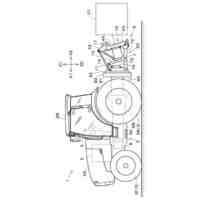
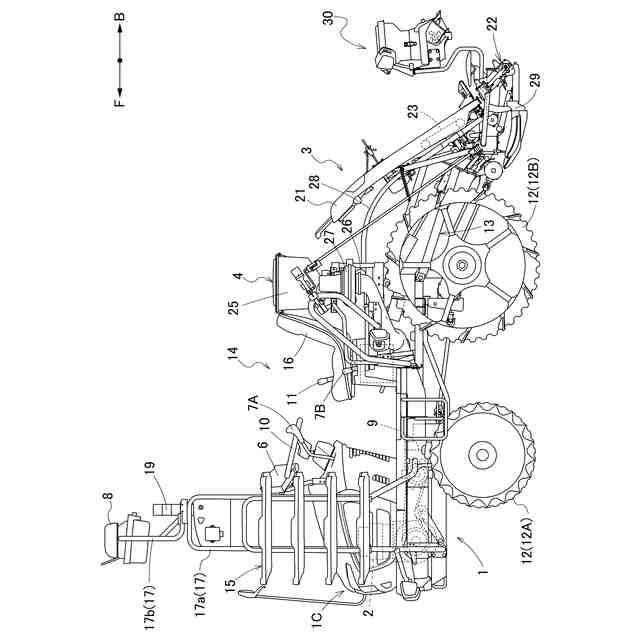
田植機のような圃場作業車では、機体の前部に予備苗載せ台が設置されており、苗補給の際に、機体の前端を畔などの圃場境界物に寄せ付け、機体の前端から、苗補給が行われる。田植機では、苗補給が頻繁に行われる重要な資材補給作業であり、その際に動力部を一時停止することが好適である。このことから、本発明では、前記一時動力停止条件に、前記圃場作業車が前記補給辺に向いた前進姿勢であることが含まれている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
2日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
18日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業車両
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ