TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103723
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221317
出願日
2023-12-27
発明の名称
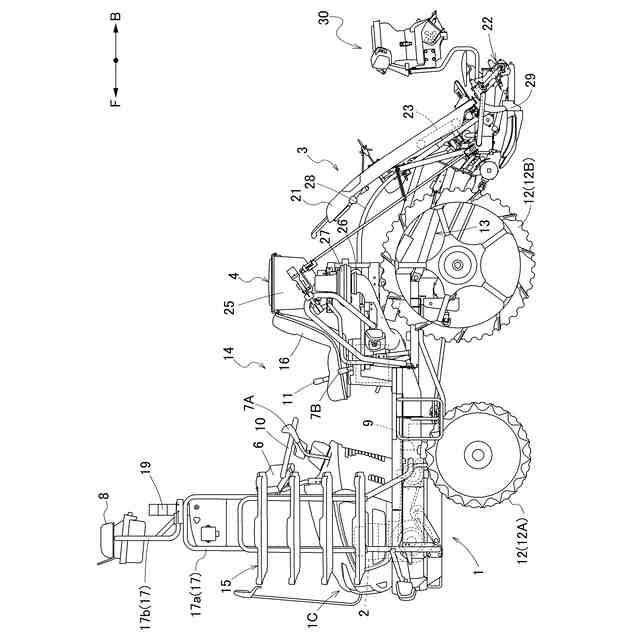
圃場作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】方向転換のための旋回走行を経て次の走行経路に進入する際の車体のずれ量が大きくても、効果的に解消できる自動走行可能な圃場作業車を提供する。
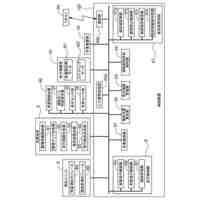
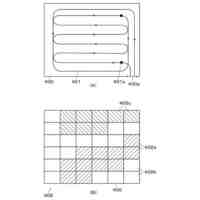
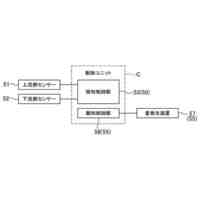
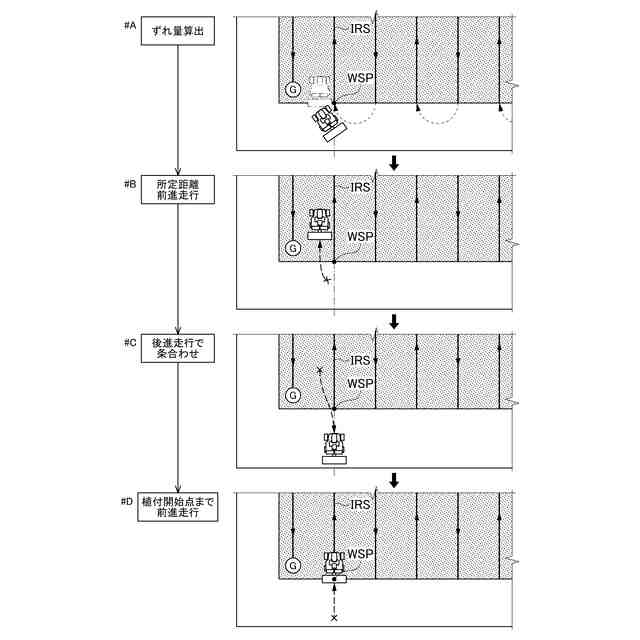
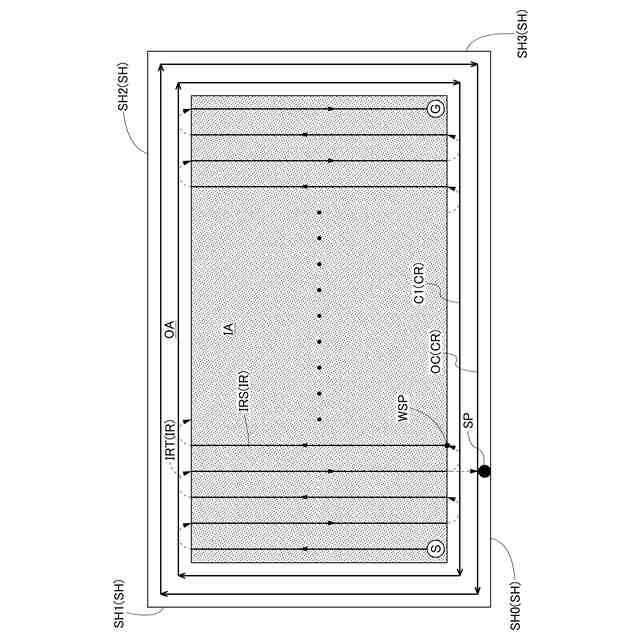
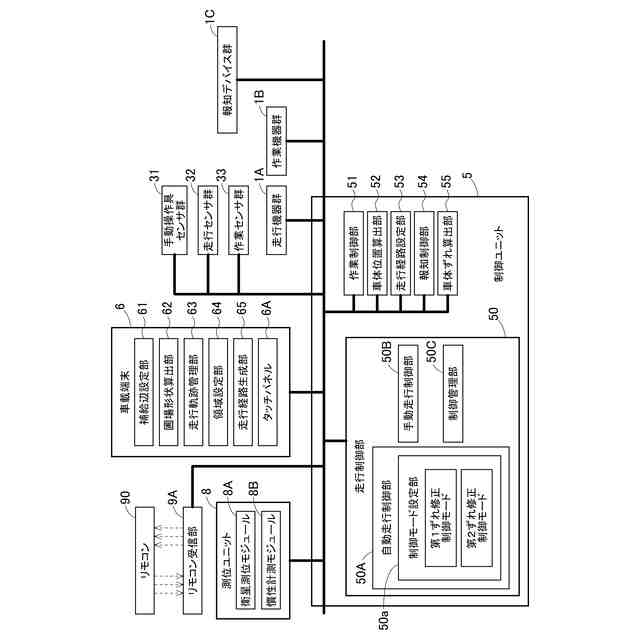
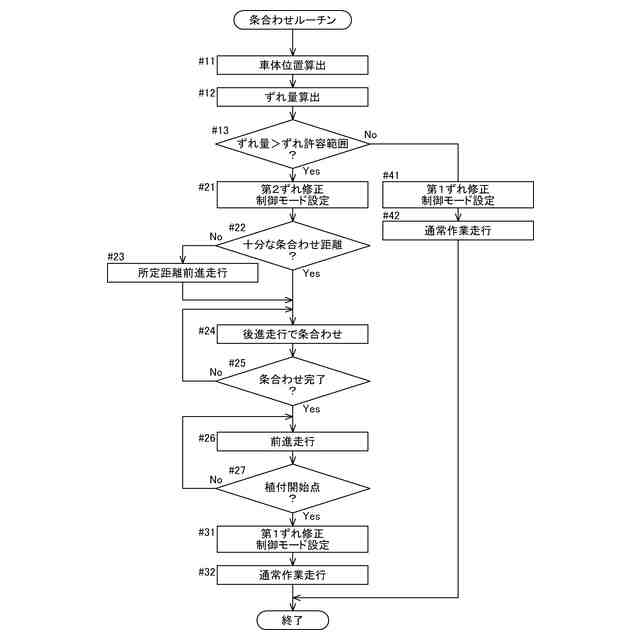
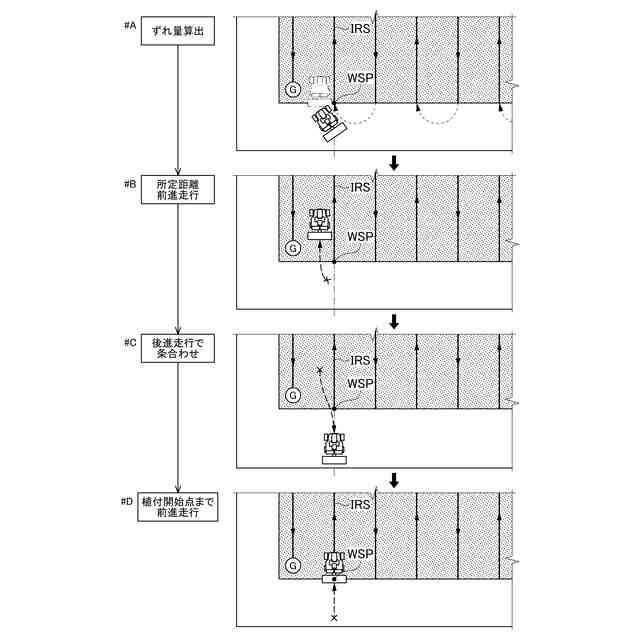
【解決手段】圃場作業車は、圃場の外周領域に設定された周回走行経路と、外周領域の内側の内部領域に設定された内部経路IRSと旋回経路とからなる往復走行経路に沿って走行し、車体位置を算出する車体位置算出部と、目標走行経路としての内部経路IRSと車体位置とから内部経路IRSまたは内部経路IRSと別に新たに設けられた目標に対する車体のずれ量を算出する車体ずれ算出部と、旋回経路から内部経路IRSへの移行時に生じるずれ量がずれ許容範囲を超えた場合に、少なくとも後進を用いてずれ量を減少させる旋回ずれ修正制御モードを有する自動走行制御部とを備える。
【選択図】図6
特許請求の範囲
【請求項1】
圃場の外周に沿う外周領域に設定された周回走行経路と、前記外周領域の内側の内部領域に設定された内部経路と旋回経路とからなる往復走行経路に沿って走行する圃場作業車であって、
車体位置を算出する車体位置算出部と、
目標走行経路としての前記内部経路と前記車体位置とから前記内部経路または前記内部経路と別に新たに設けられた目標に対する車体のずれ量を算出する車体ずれ算出部と、
前記旋回経路から前記内部経路への移行時に生じる前記ずれ量がずれ許容範囲を超えた場合に、少なくとも後進を用いて前記ずれ量を減少させる旋回ずれ修正制御モードを有する自動走行制御部と、
を備える圃場作業車。
続きを表示(約 760 文字)
【請求項2】
前記自動走行制御部は、前記旋回ずれ修正制御モードにおいて、前記旋回経路から前記内部経路への移行時に生じる前記ずれ量が前記ずれ許容範囲を超えた場合に、前進及び後進を用いて前記ずれ量を減少させる請求項1に記載の圃場作業車。
【請求項3】
前記自動走行制御部は、さらに、前記内部経路に沿った前進走行において前記ずれ量を減少させる経路ずれ修正制御モードを有する請求項1に記載の圃場作業車。
【請求項4】
前記ずれ許容範囲は、方位偏差と位置偏差とに基づいて決定される請求項1に記載の圃場作業車。
【請求項5】
前記旋回ずれ修正制御モードでは、圃場作業を伴わない非作業走行が行われる請求項1に記載の圃場作業車。
【請求項6】
前記旋回ずれ修正制御モードでは、前記内部領域から前記外周領域までの前記外周に向かう後進走行によって前記ずれ量を減少させる請求項5に記載の圃場作業車。
【請求項7】
前記旋回ずれ修正制御モードでは、前記後進走行に先立って、所定距離だけ前進走行が行われる請求項6に記載の圃場作業車。
【請求項8】
前記所定距離は、前記後進走行によって前記ずれ量が前記ずれ許容範囲に入ることができる距離である請求項7に記載の圃場作業車。
【請求項9】
前記後進走行における単位後進走行距離あたりでの最大ずれ修正量が設定されており、前記最大ずれ修正量と前記ずれ量とに基づいて、前記所定距離が求められる請求項7に記載の圃場作業車。
【請求項10】
前記後進走行の終了点が、前記内部経路における圃場作業開始点となるように、前記旋回ずれ修正制御モードが実行される請求項8に記載の圃場作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場に設定された走行経路を制御目標として自動走行する圃場作業車に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、自機位置と目標走行経路に対する走行機体の向きとに基づいて、目標走行経路に沿うように走行機体を操舵する自動操舵部を備えた田植機が開示されている。この田植機は、人為操舵による旋回走行から自動操舵による目標走行経路に沿った直進走行への移行時に、走行機体の向きが所定の許容範囲を超えている限り、自動操舵部による自動操舵走行への移行が禁止される。
【先行技術文献】
【特許文献】
【0003】
特開2016-024541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1による田植機では、方向転換のための旋回走行を経て次の直線状の走行経路に進入する際、機体の向きが所定の許容範囲を超えていると、運転者による手動操舵で、機体の姿勢を修正する必要がある。運転者の搭乗していない無人での自動走行では、走行を停止するか、あるいは、そのまま、前進しながら走行経路に沿うように機体の大きな姿勢変更を伴うずれ修正走行を行う必要がある。このようなずれ修正走行が苗植付作業を行いながら行われると、不揃いな苗植付跡が生じる。また、ずれ修正走行が苗植付作業なしで行われると、苗欠損領域が生じる。
【0005】
上述した実情に鑑み、本発明の目的は、方向転換のための旋回走行を経て次の走行経路に進入する際の車体のずれ量が大きくても、効果的に解消できる自動走行可能な圃場作業車を提供することである。
【課題を解決するための手段】
【0006】
本発明による圃場作業車は、圃場の外周に沿う外周領域に設定された周回走行経路と、前記外周領域の内側の内部領域に設定された内部経路と旋回経路とからなる往復走行経路に沿って走行し、車体位置を算出する車体位置算出部と、目標走行経路としての前記内部経路と前記車体位置とから前記内部経路または前記内部経路と別に新たに設けられた目標に対する車体のずれ量を算出する車体ずれ算出部と、前記旋回経路から前記内部経路への移行時に生じる前記ずれ量がずれ許容範囲を超えた場合に、少なくとも後進を用いて前記ずれ量を減少させる旋回ずれ修正制御モードを有する自動走行制御部とを備える。
【0007】
この構成によれば、自動走行で、旋回経路から前記内部経路への移行時に、内部経路または内部経路と別に新たに設けられた目標に対するずれ量がずれ許容範囲を超えた場合、少なくとも後進を用いてずれ量を減少させて作業走行経路である内部経路に進入するため、内部経路の始点から作業走行を行うことができる。したがって、圃場作業車が田植機であれば、不揃いな苗植付跡や苗欠損領域の発生が回避される。他の圃場作業車であっても、良好な圃場作業が可能となる。
【0008】
内部経路と旋回経路とからなる往復走行経路を自動走行するために、本発明では、自動走行制御部は、さらに、前記内部経路に沿った前進走行において前記ずれ量を減少させる経路ずれ修正制御モードを有する。つまり、自動走行制御部は、この経路ずれ修正制御モードである第1ずれ修正制御モードと、上述した旋回ずれ修正制御モードである第2ずれ修正制御モードとの2つの異なるずれ修正制御モードを有する。これにより、圃場作業車は、内部経路と旋回経路の全てを自動で走行することができる。
【0009】
目標走行経路に沿って適切に自動走行を行うための要求される車体(圃場作業車)の適正な姿勢は、目標走行経路と車体の前後方向中心線との交差角である方位偏差と、目標走行経路に直交する横断方向での目標走行経路と車体の基準点との間の距離である位置偏差とによって規定される。このことから、ずれ許容範囲は、方位偏差と位置偏差とを変数とする、経験的かつ実験的に求められた二変数関数から求められる関数値の分布に基づいて、決定されると好都合である。このことから、本発明では、前記ずれ許容範囲は、方位偏差と位置偏差とに基づいて決定されることが提案される。
【0010】
旋回ずれ修正制御モード(第2ずれ修正制御モード)は、後進を伴うずれ量修正走行であるので、作業を行いながらの走行は、結果的に不適切な作業軌跡をもたらすことになる。このことから、本発明では、前記旋回ずれ修正制御モードでは、圃場作業を伴わない非作業走行が行われることが提案される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
農作業車
3日前
株式会社クボタ
作業機の支援システム、及び作業機の支援方法
2日前
株式会社クボタケミックス
下水道管用のリブ付き継手のための樹脂組成物およびリブ付き継手
3日前
個人
釣り用ルアー
11日前
個人
釣り用ルアー
11日前
個人
播種機
24日前
井関農機株式会社
作業車両
12日前
有限会社マイク
囲い罠
17日前
井関農機株式会社
コンバイン
17日前
井関農機株式会社
圃場作業機
13日前
株式会社シマノ
釣り具
17日前
個人
室内栽培システム
20日前
井関農機株式会社
移植機
24日前
井関農機株式会社
歩行型管理機
11日前
井関農機株式会社
圃場管理装置
25日前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
株式会社シマノ
釣竿
12日前
株式会社ダイイチ
海苔網の酸処理船
20日前
株式会社村岡水産
釣り用ワーム
11日前
松山株式会社
草刈作業機
10日前
株式会社パクマケ
植栽用遮光板
3日前
株式会社山田鉄工
海苔網処理船
20日前
株式会社山田鉄工
海苔網処理船
20日前
株式会社山田鉄工
海苔網処理船
20日前
大栄工業株式会社
誘引剤収容容器
18日前
井関農機株式会社
水田引水管理システム
11日前
鹿島建設株式会社
エビ類育成漁礁
12日前
花王株式会社
抗菌剤組成物
10日前
松山株式会社
スタンド装置
24日前
株式会社クボタ
移植機
13日前
株式会社クボタ
収穫機
17日前
株式会社クボタ
移植機
13日前
有限会社マドネスジャパン
ポッパー
11日前
株式会社クボタ
作業車
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ