TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103689
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221256
出願日
2023-12-27
発明の名称
管路図設計支援方法、管路図設計支援装置および管路図設計支援プログラム
出願人
株式会社クボタ
代理人
個人
,
個人
主分類
G06F
30/18 20200101AFI20250702BHJP(計算;計数)
要約
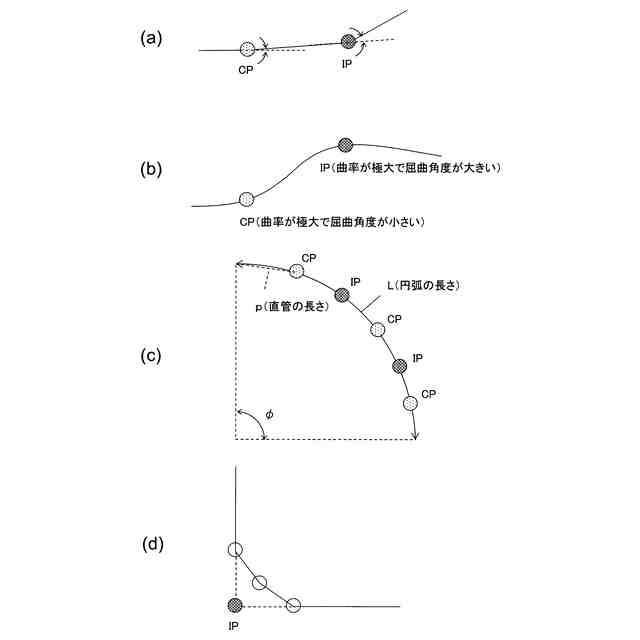
【課題】管の布設経路を作成するために必要な交点などを適切な位置に自動で設定できる管路図設計支援方法を提供する
【解決手段】複数の管で構成される管路図を、コンピュータを用いて設計するための管路図設計支援方法であって、複数の線要素に分解された計画線を取得する計画線取得ステップと、各線要素が交わる屈曲点の屈曲角度を算出する屈曲角度算出ステップと、前記屈曲角度が少なくとも所定の閾値以上となる屈曲点の属性を、異形管を配置する交点と定義し、前記屈曲角度が所定の閾値未満となる屈曲点の属性を、直管を配置する通過指示点に設定する屈曲点属性設定ステップと、を有する。
【選択図】図4
特許請求の範囲
【請求項1】
複数の管で構成される管路図を、コンピュータを用いて設計するための管路図設計支援方法であって、
複数の線要素に分解された計画線を取得する計画線取得ステップと、
各線要素が交わる屈曲点の屈曲角度を算出する屈曲角度算出ステップと、
前記屈曲角度が少なくとも所定の閾値以上となる屈曲点の属性を、異形管を配置する交点と定義し、前記屈曲角度が所定の閾値未満となる屈曲点の属性を、直管を配置する通過指示点に設定する屈曲点属性設定ステップと、
を有する管路図設計支援方法。
続きを表示(約 1,200 文字)
【請求項2】
前記線要素が円弧となる場合に、前記円弧に配置可能な直管の数を算出し、直管の数から継手の数を算出する継手数算出ステップと、
前記継手の数と継手の許容屈曲角度から前記円弧に直管を配した場合の最大曲げ角度を算出する最大曲げ角度算出ステップと、
最大曲げ角度と前記円弧の中心角の大きさを比較し、前記交点の要否を判定する円弧部交点配置要否判定ステップと、
を有する請求項1の管路図設計支援方法。
【請求項3】
前記屈曲点の間隔を検出する屈曲点間距離検出ステップと、
前記屈曲点の間の距離が、所定の閾値未満である場合に前記屈曲点の両隣の線分を延長して交わる点を新たな交点とする隣接部交点設定ステップと、
を有する請求項1の管路図設計支援方法。
【請求項4】
複数の管で構成される管路図を生成する管路図設計支援装置であって、
複数の線要素に分解された計画線を取得する計画線取得部と、
各線要素が交わる屈曲点の屈曲角度を算出する屈曲角度算出部と、
前記屈曲角度が少なくとも所定の閾値以上となる屈曲点の属性を、異形管を配置する交点と定義し、前記屈曲角度が所定の閾値未満となる屈曲点の属性を、直管を配置する通過指示点に設定する屈曲点属性設定部と、
を有する管路図設計支援装置。
【請求項5】
前記線要素が円弧となる場合に、前記円弧に配置可能な直管の数を算出し、直管の数から継手の数を算出する継手数算出部と、
前記継手の数と継手の許容屈曲角度から前記円弧に直管を配した場合の最大曲げ角度を算出する最大曲げ角度算出部と、
最大曲げ角度と前記円弧の中心角の大きさを比較し、前記交点の要否を判定する円弧部交点配置要否判定部と、
を有する請求項4の管路図設計支援装置。
【請求項6】
前記屈曲点の間隔を検出する屈曲点間距離検出部と、
前記屈曲点の間の距離が、所定の閾値未満である場合に前記屈曲点の両隣の線分を延長して交わる点を新たな交点とする隣接部交点設定部と、
を有する請求項4の管路図設計支援装置。
【請求項7】
複数の管で構成される3次元管路図を生成する管路図設計支援プログラムであって、
複数の線要素に分解された計画線を取得する計画線取得ステップと、
各線要素が交わる屈曲点の屈曲角度を算出する屈曲角度算出ステップと、
前記屈曲角度が少なくとも所定の閾値以上となる屈曲点の属性を、異形管を配置する交点と定義し、前記屈曲角度が所定の閾値未満となる屈曲点の属性を、直管を配置する通過指示点に設定する屈曲点属性設定ステップと、
をコンピュータに実行させるための管路図設計支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、管路図設計支援方法、管路図設計支援方法および管路図設計支援プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、管路図作成用のアプリケーションプログラムがインストールされた管路図作成支援装置を用いて新たに布設する管路を設計し、或いは既存の管路を更新する管路を設計する場合に、画面上に表示される2次元の地図レイヤに重畳した管路図レイヤにポインティングデバイスを介して曲管などの異形管を配する位置を交点として指示し、各交点に配された異形管同士を複数の直管で接続するように2次元の計画配管ルート、つまり2次元計画線が作成されていた。
【0003】
そして、2次元計画線の各交点に配された異形管同士を直管で接続するべく、2次元計画線に沿うように配する直管の本数や継手の接合角度、切管の有無などを自動で算出する管割処理が実行されていた。
【0004】
近年、コンピュータを用いて道路の地下に埋設されている電力線、通信線、ガス管、水道管、下水管などの地下の埋設物を3次元で可視化する3次元マップ化技術が開発されつつあり、上述した2次元の管路図を設計する管路図作成支援装置と3次元マップ化技術とを融合した3次元設計支援装置が望まれている。
【先行技術文献】
【特許文献】
【0005】
特開2021-189923号公報
特開2023-85036号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
管路図設計支援装置を用いてこのような計画線を作成するためには、画面に表示される道路地図などの背景図の上に、始点から終点に到る複数の交点と、交点間に選択的に指定される通過指示点とがオペレータにより入力操作されることが必要であり、始点や終点を除き、熟練のオペレータでなければ交点や通過指示点を適切な位置に設定することが困難であった。特に、複雑な経路となる3次元計画線では、熟練のオペレータであっても、適切な位置に交点などを設定するのは非常に困難であった。
【0007】
本発明の目的は、管の布設経路を作成するために必要な交点などを適切な位置に自動で設定できる管路図設計支援方法、管路図設計支援装置および管路図設計支援プログラムを提供する点にある。
【課題を解決するための手段】
【0008】
上述の目的を達成するため、本発明による管路図設計支援方法の第一の特徴構成は、複数の管で構成される管路図を、コンピュータを用いて設計するための管路図設計支援方法であって、複数の線要素に分解された計画線を取得する計画線取得ステップと、各線要素が交わる屈曲点の屈曲角度を算出する屈曲角度算出ステップと、前記屈曲角度が少なくとも所定の閾値以上となる屈曲点の属性を、異形管を配置する交点と定義し、前記屈曲角度が所定の閾値未満となる屈曲点の属性を、直管を配置する通過指示点に設定する屈曲点属性設定ステップと、を有する点にある。
【0009】
計画線取得ステップにより複数の線要素に分解された計画線が取得され、屈曲角度算出ステップで各線要素が交わる屈曲点の屈曲角度が算出される。次に屈曲点属性設定ステップで、屈曲角度が所定の閾値以上となる屈曲点を、異形管を配置する交点と設定し、屈曲角度が所定の閾値未満となる屈曲点を、直管を配置する通過指示点と設定することで、適切な交点および通過指示点が自動で設定されるようになる。
【0010】
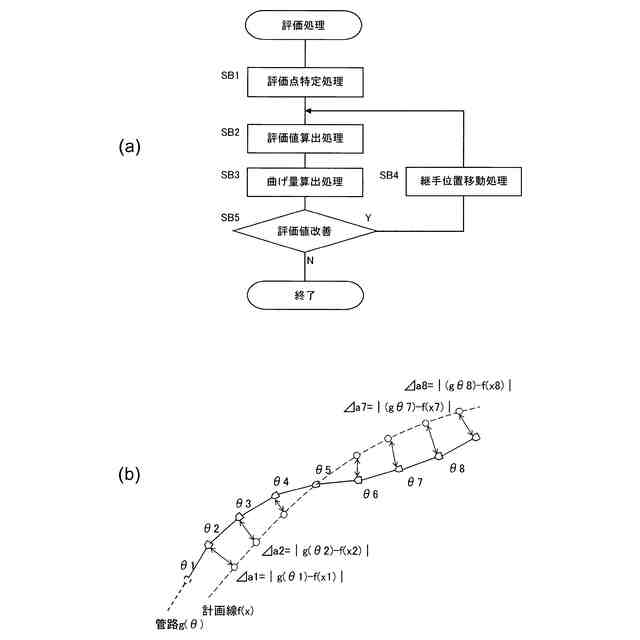
同第二の特徴構成は、上述した第一の特徴構成に加えて、前記線要素が円弧となる場合に、前記円弧に配置可能な直管の数を算出し、直管の数から継手の数を算出する継手数算出ステップと、前記継手の数と継手の許容屈曲角度から前記円弧に直管を配した場合の最大曲げ角度を算出する最大曲げ角度算出ステップと、最大曲げ角度と前記円弧の中心角の大きさを比較し、前記交点の要否を判定する円弧部交点配置要否判定ステップと、を有する点にある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
1か月前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
田植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
田植機
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ