TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104131
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221998
出願日
2023-12-27
発明の名称
管接合装置及び管接合方法
出願人
株式会社クボタ
代理人
個人
,
個人
主分類
F16L
21/00 20060101AFI20250702BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】管の挿し口と被接合管の受口との接合作業中に、前記管の挿し口と前記被接合管の受口との接合異常を判定して接合作業を効率良く行うことができる管接合装置を実現する。
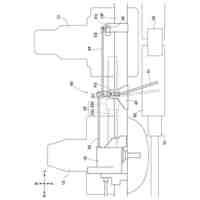
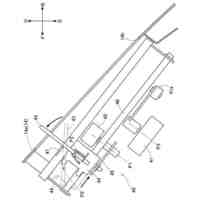
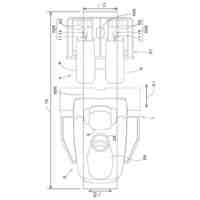
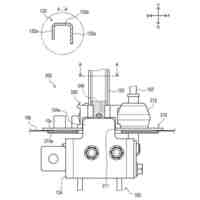
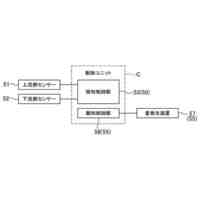
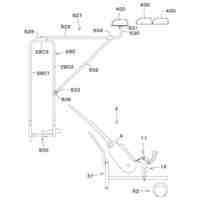
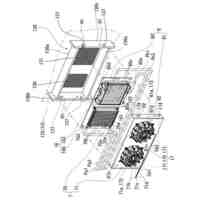
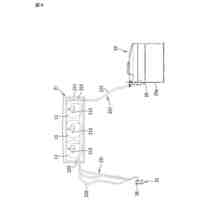
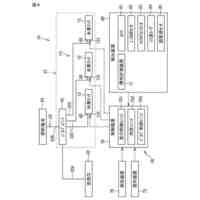
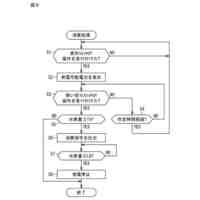
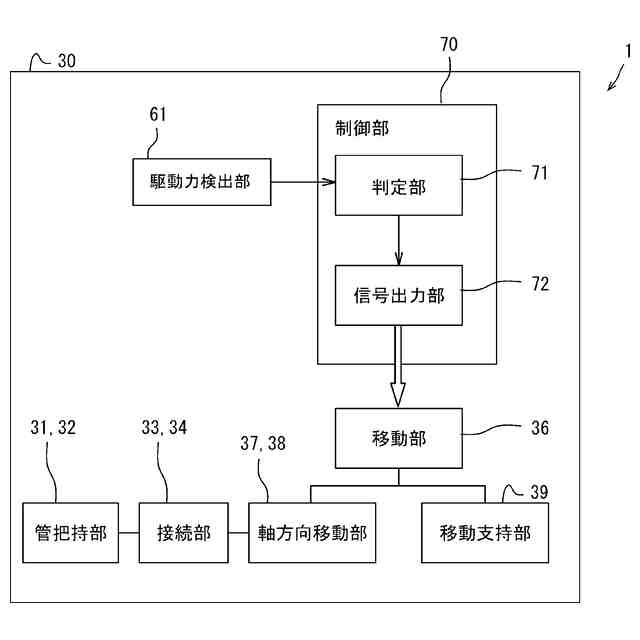
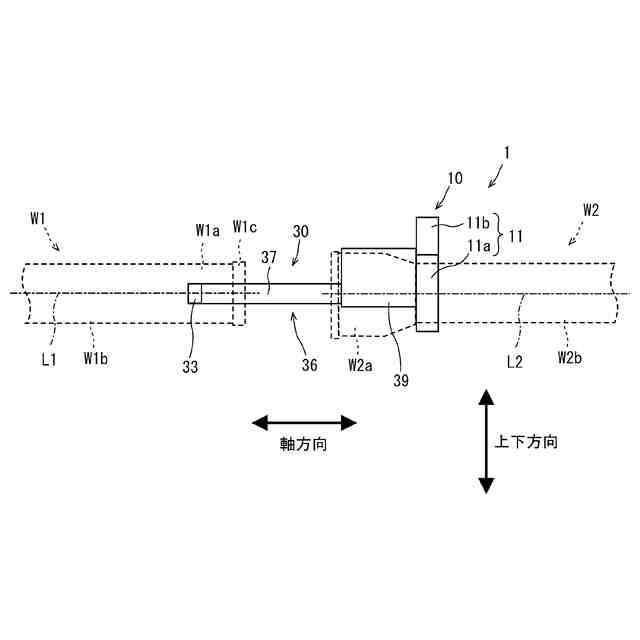
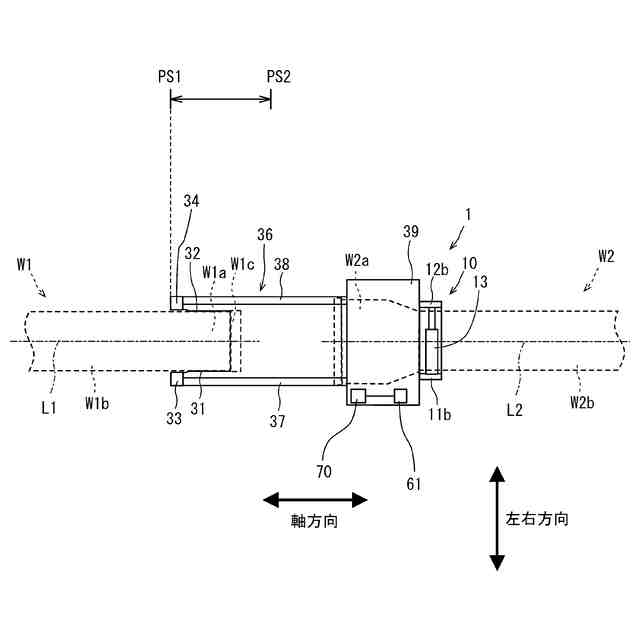
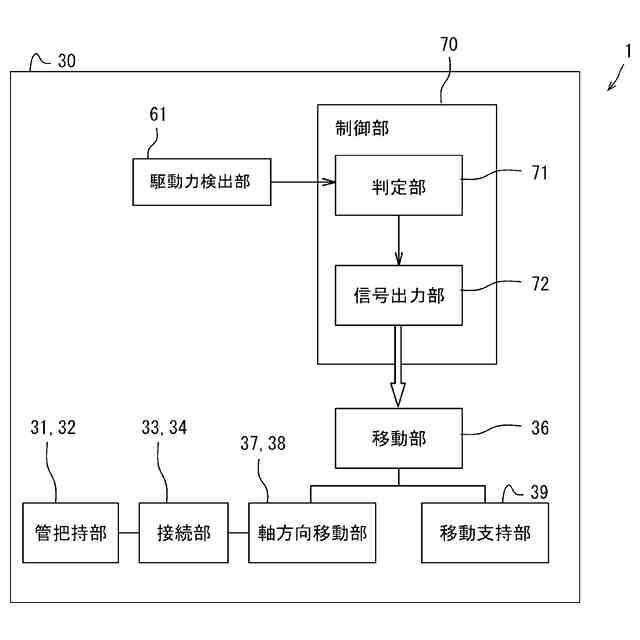
【解決手段】管接合装置1は、被接合管の受口側に取り付けられる被接合管取付部と、管の挿し口側を把持する一対の管把持部31,32と、管の挿し口と被接合管の受口とを軸方向に接合するように、一対の管把持部31,32を前記軸方向に移動させる移動部36と、一対の管把持部31,32を前記軸方向に移動させる際の移動部36の駆動力を検出する駆動力検出部61と、駆動力検出部61が検出した移動部36の駆動力に基づいて、管の挿し口と被接合管の受口との接合状態を判定する判定部71と、を有する。
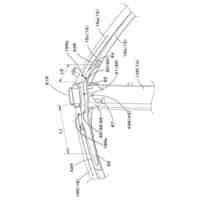
【選択図】図4
特許請求の範囲
【請求項1】
挿し口と受口を有する管の挿し口を、挿し口と受口を有する被接合管の受口に接合するための管接合装置であって、
前記被接合管の受口側に取り付けられる被接合管取付部と、
前記管の挿し口側を把持する管把持部と、
前記管の挿し口と前記被接合管の受口とを軸方向に接合するように、前記被接合管取付部及び前記管把持部の少なくとも一方を前記軸方向に移動させる移動部と、
前記被接合管取付部及び前記管把持部の少なくとも一方を前記軸方向に移動させる際の前記移動部の駆動力を検出する駆動力検出部と、
前記駆動力検出部が検出した前記移動部の駆動力に基づいて、前記管の挿し口と前記被接合管の受口との接合状態を判定する判定部と、
を有する、
管接合装置。
続きを表示(約 2,300 文字)
【請求項2】
請求項1に記載の管接合装置において、
前記被接合管に対する前記管の位置を検出する管位置検出部をさらに有し、
前記判定部は、
前記管の位置毎に定められた前記駆動力の許容範囲に基づいて、前記管位置検出部が検出した前記管の位置において前記駆動力検出部が検出した前記駆動力が、前記駆動力の許容範囲に含まれない場合、前記管の挿し口と前記被接合管の受口との接合状態が異常であると判定する、
管接合装置。
【請求項3】
請求項1に記載の管接合装置において、
前記被接合管に対する前記管の位置を検出する管位置検出部をさらに有し、
前記判定部は、
前記管の位置に基づいて定めた前記管の単位移動距離当たりの前記駆動力の変化率の許容範囲に基づいて、前記管位置検出部が検出した前記管の位置と、前記管の位置において前記駆動力検出部が検出した前記駆動力とによって算出される前記管の単位移動距離当たりの前記駆動力の変化率が、前記駆動力の変化率の許容範囲に含まれない場合、前記管の挿し口と前記被接合管の受口との接合状態が異常であると判定する、
管接合装置。
【請求項4】
請求項1から3のいずれか一項に記載の管接合装置において、
前記移動部に対して制御信号を出力する信号出力部をさらに有し、
前記信号出力部は、
前記判定部によって、前記管の挿し口と前記被接合管の受口との接合状態が異常であると判定された場合、前記移動部に対して前記被接合管取付部及び前記管把持部の移動を停止させる制御信号を出力する、
管接合装置。
【請求項5】
請求項4に記載の管接合装置において、
作業者による前記移動部に対する操作指示に応じた制御信号を生成する操作指示受付部と、
前記操作指示に応じて前記操作指示受付部から前記移動部に制御信号を出力可能な手動操作モードに切り替える手動操作切り替え部と、をさらに有し、
前記手動操作切り替え部は、
前記信号出力部によって、前記移動部に対して前記被接合管取付部及び前記管把持部の移動を停止させる制御信号が出力された場合、前記手動操作モードに切り替える、
管接合装置。
【請求項6】
請求項5に記載の管接合装置において、
前記手動操作切り替え部は、
前記手動操作モードに切り替わった場合、前記操作指示受付部によって生成された前記移動部に対する制御信号だけを前記移動部に出力可能に構成される、
管接合装置。
【請求項7】
請求項1に記載の管接合装置において、
前記管の挿し口と前記被接合管の受口との接合の完了を判定する接合完了判定部と、
前記管の挿し口と前記被接合管の受口との接合の開始から接合の完了までの間に前記駆動力検出部が検出した前記移動部の駆動力の履歴に基づいて前記管の挿し口と前記被接合管の受口との接合状態を評価する評価部と、をさらに有し、
前記評価部は、
前記接合完了判定部によって前記管の挿し口と前記被接合管の受口との接合が完了したと判定されると、前記管の挿し口と前記被接合管の受口との接合状態を評価する、管接合装置。
【請求項8】
管の挿し口を、前記管と接合される被接合管の受口に接合する管接合方法であって、
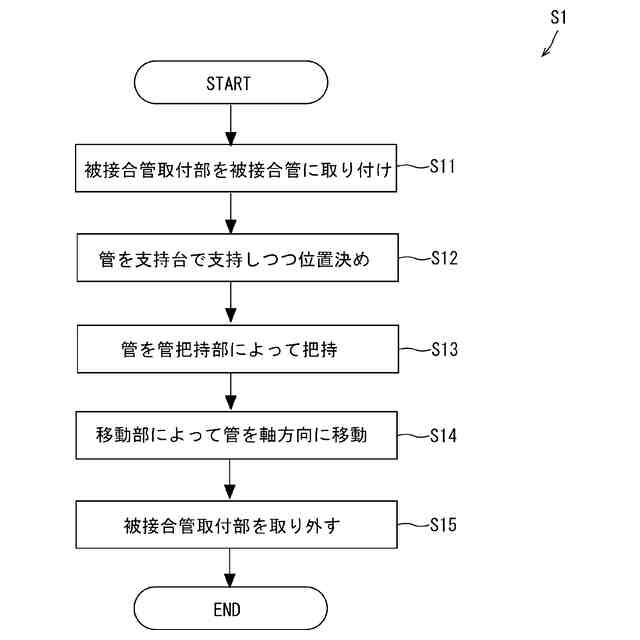
被接合管取付部を前記被接合管の受口側に取り付ける被接合管取り付け工程と、
管把持部によって前記管の挿し口側を把持する管把持工程と、
移動部によって、前記管の挿し口と前記被接合管の受口とを軸方向に接合するように、前記被接合管取付部及び前記管把持部の少なくとも一方を前記軸方向に移動させる移動工程と、
駆動力検出部によって、前記被接合管取付部及び前記管把持部の少なくとも一方を前記軸方向に移動させる際の前記移動部の駆動力を検出する駆動力検出工程と、
判定部によって、前記駆動力検出部が検出した前記移動部の駆動力に基づいて、前記管の挿し口と前記被接合管の受口との接合状態を判定する判定工程と、
を有する、
管接合方法。
【請求項9】
請求項8に記載の管接合方法において、
管位置検出部によって、前記被接合管に対する前記管の位置を検出する管位置検出工程をさらに有し、
前記判定工程では、前記管の位置毎に定められた前記駆動力の許容範囲に基づいて、前記管位置検出部が検出した前記管の位置において前記駆動力検出部が検出した前記駆動力が、前記駆動力の許容範囲に含まれない場合、前記管の挿し口と前記被接合管の受口との接合状態が異常であると判定する、
管接合方法。
【請求項10】
請求項8に記載の管接合方法において、
管位置検出部によって、前記被接合管に対する前記管の位置を検出する管位置検出工程をさらに有し、
前記判定工程では、前記管の位置に基づいて定めた前記管の単位移動距離当たりの前記駆動力の変化率の許容範囲に基づいて、前記管位置検出部が検出した前記管の位置と、前記管の位置において前記駆動力検出部が検出した前記駆動力とによって算出される前記管の単位移動距離当たりの前記駆動力の変化率が、前記駆動力の変化率の許容範囲に含まれない場合、前記管の挿し口と前記被接合管の受口との接合状態が異常であると判定する、
管接合方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、管の挿し口を、前記管と接合される被接合管の受口に接合するための管接合装置及び管接合方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
挿し口及び受口を有するダクタイル鋳鉄管(水道管の一例)の敷設工事などにおいて、地中の溝内に配置された被接合管に対して、管を接合する管接合作業が行われている。この管接合作業では、作業者は、まず、前記被接合管と接合される前記管を、前記溝内に吊り下ろす必要がある。その後、作業者は、前記溝内で、前記管と前記被接合管とを芯合わせして、前記管の挿し口を前記被接合管の受口に挿入し、前記挿し口と前記受口とを接合する必要がある。
【0003】
このような従来の管接合作業では、作業者は、前記溝内で前記被接合管に対する前記管の位置を確認しながら、前記管を前記溝内に吊り下ろす必要がある。また、作業者は、前記溝内で、前記管と前記被接合管との芯合わせを手作業で行う必要がある。
【0004】
このように、従来の管接合作業は、作業者の作業負担が大きく且つ狭い溝内で作業を行う必要があるため、作業性があまり良くなかった。
【0005】
これに対し、作業者の作業負担を低減するため、管接合作業の機械化が提案されている。例えば、特許文献1には、管の受口と被接合管の挿口とをそれぞれクランプして前記受口の内部に前記挿口を挿入するようにした管接合装置が開示されている。前記管接合装置は、挿口用クランプと、受口用クランプとを有する。前記挿口用クランプには、位置設定部材が設けられている。前記位置設定部材は、前記位置設定部材の軸方向の一方の端部に位置する接触部と、光学式の白線検知センサとを有する。前記管接合装置では、前記管をクランプした挿口用クランプを、油圧シリンダによって、前記管の軸方向の一方に移動させて前記挿口を前記被接合管の受口に挿入する。また、前記管接合装置では、前記挿口が前記受口に所定の距離まで接近したとき、前記接触部が、前記受口の端面に接触する。また、前記管の前記軸方向の一端から所定の距離の位置において前記挿口の外面に白線が塗布されている。上述のように前記管の軸方向の一方に移動させる際、前記白線検知センサが前記白線を読み取ると、前記油圧シリンダの動作が停止する。
【先行技術文献】
【特許文献】
【0006】
特開平04-357383号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、前記特許文献1の管接合装置では、管継手の受口の内部に挿口が所定量だけ挿入されたことを、前記白線センサによって検知している。このため、前記特許文献1の管接合装置では、管の挿入量は計測することはできても、前記被接合管の受口内部の接合状態を把握できない場合がある。このため、前記特許文献1の管接合装置では、接合作業の効率化と、管の挿し口と被接合管の受口との接合作業中における接合状態の判定とを両立することが望ましい。
【0008】
よって、接合作業を効率化しつつ、管の挿し口と被接合管の受口との接合作業中に、前記管の挿し口と前記被接合管の受口との接合状態を判定できる管接合装置が求められている。
【0009】
本発明の目的は、管の挿し口と被接合管の受口との接合作業中に、前記管の挿し口と前記被接合管の受口との接合異常を判定して接合作業を効率良く行うことができる管接合装置を実現することにある。
【課題を解決するための手段】
【0010】
本発明の一実施形態に係る管接合装置は、挿し口と受口を有する管の挿し口を、挿し口と受口を有する被接合管の受口に接合するための装置である。前記管接合装置は、前記被接合管の受口側に取り付けられる被接合管取付部と、前記管の挿し口側を把持する管把持部と、前記管の挿し口と前記被接合管の受口とを軸方向に接合するように、前記被接合管取付部及び前記管把持部の少なくとも一方を前記軸方向に移動させる移動部と、前記被接合管取付部及び前記管把持部の少なくとも一方を前記軸方向に移動させる際の前記移動部の駆動力を検出する駆動力検出部と、前記駆動力検出部が検出した前記移動部の駆動力に基づいて、前記管の挿し口と前記被接合管の受口との接合状態を判定する判定部と、を有する(第1の構成)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業車
3日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業機械
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業機械
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
キャビン
1か月前
株式会社クボタ
キャビン
1か月前
株式会社クボタ
キャビン
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ