TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103407
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220773
出願日
2023-12-27
発明の名称
作業車両、および作業車両を制御する方法
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両のキーオン操作直後でも自動操舵を有効化できるようにする。
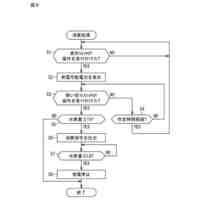
【解決手段】自動操舵運転が可能な作業車両が開示される。前記作業車両は、前記作業車両の測位を行う測位システムと、不揮発性メモリを有する制御装置と、を備える。前記制御装置は、前記測位システムによって計測された位置の時間変化に基づいて前記作業車両の方位を推定し、前記作業車両の前記位置および前記方位と、設定された目標経路とに基づいて、前記作業車両の自動操舵制御を行い、前記作業車両のキーオフ操作に応答して、前記作業車両の前記方位を前記不揮発性メモリに記憶し、前記作業車両のキーオン操作が行われた後、前記不揮発性メモリに記憶された前記方位を前記作業車両の初期方位として前記自動操舵制御を開始する。
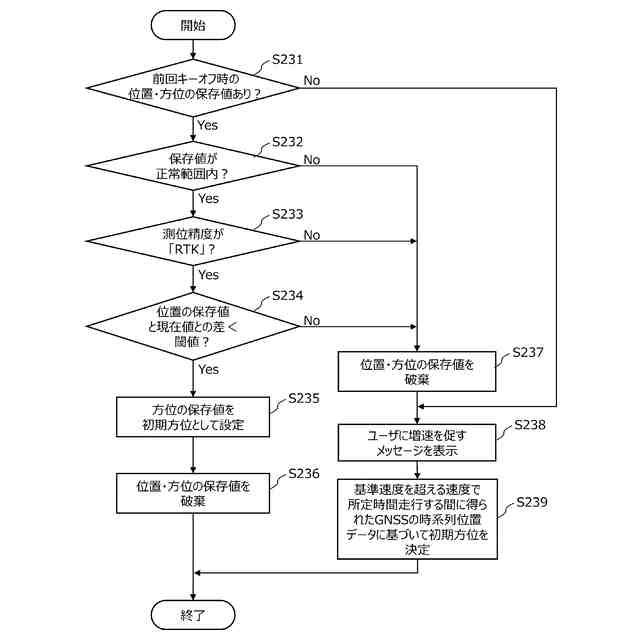
【選択図】図12
特許請求の範囲
【請求項1】
自動操舵運転が可能な作業車両であって、
前記作業車両の測位を行う測位システムと、
不揮発性メモリを有する制御装置と、
を備え、
前記制御装置は、
前記測位システムによって計測された位置の時間変化に基づいて前記作業車両の方位を推定し、
前記作業車両の前記位置および前記方位と、設定された目標経路とに基づいて、前記作業車両の自動操舵制御を行い、
前記作業車両のキーオフ操作に応答して、前記作業車両の前記方位を前記不揮発性メモリに記憶し、
前記作業車両のキーオン操作が行われた後、前記不揮発性メモリに記憶された前記方位を前記作業車両の初期方位として前記自動操舵制御を開始する、
作業車両。
続きを表示(約 1,700 文字)
【請求項2】
前記制御装置は、前記不揮発性メモリに前記方位が記憶されている状態で前記キーオン操作が行われた場合、前記作業車両が停車している状態で前記自動操舵制御を開始させる操作を可能にし、前記操作が行われた後、前記不揮発性メモリに記憶された前記方位を前記作業車両の初期方位として前記自動操舵制御を開始する、請求項1に記載の作業車両。
【請求項3】
前記制御装置は、前記自動操舵制御を開始させる操作が行われた後、前記作業車両の走行速度が所定の速度を超えたとき、前記自動操舵制御を開始する、請求項2に記載の作業車両。
【請求項4】
前記制御装置は、
前記キーオフ操作に応答して、前記作業車両の前記位置および前記方位を前記不揮発性メモリに記憶し、
前記キーオン操作に応答して、前記不揮発性メモリに記憶された前記位置と、前記測位システムによって計測された位置との差を計算し、
前記差が閾値よりも小さい場合、前記不揮発性メモリに記憶された前記方位を前記初期方位として、前記自動操舵制御を開始させる操作を可能にする、
請求項1から3のいずれか1項に記載の作業車両。
【請求項5】
前記制御装置は、前記差が前記閾値以上の場合、前記不揮発性メモリに記憶された前記位置および前記方位を破棄し、前記作業車両の走行速度が基準速度を超えるまで、前記自動操舵制御を開始させる操作を無効化する、請求項4に記載の作業車両。
【請求項6】
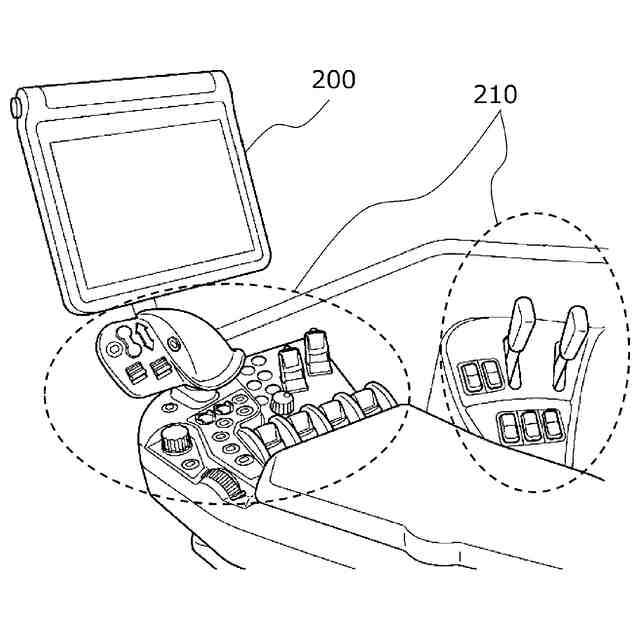
前記自動操舵制御の開始および停止の操作を行うためのユーザインターフェースを提供する表示端末をさらに備え、
前記制御装置は、
前記キーオン操作に応答して、前記不揮発性メモリに記憶された前記位置と、前記測位システムによって計測された位置との差を計算し、
前記差が前記閾値以上の場合、前記不揮発性メモリに記憶された前記位置および前記方位を破棄し、前記作業車両の増速をユーザに促すメッセージを前記表示端末に表示させ、前記走行速度が前記基準速度を超えたとき、前記自動操舵制御を開始させる操作を可能にし、
前記差が前記閾値よりも小さい場合、前記不揮発性メモリに記憶された前記方位を前記初期方位として、前記自動操舵制御を開始させる操作を可能にする、
請求項5に記載の作業車両。
【請求項7】
前記制御装置は、前記不揮発性メモリに記憶された前記位置および前記方位を破棄した場合、前記位置および/または前記方位が破棄された旨のメッセージを前記表示装置に表示させる、請求項6に記載の作業車両。
【請求項8】
前記ユーザインターフェースは、前記自動操舵制御の開始を指示するためのアイコンを含み、
前記制御装置は、
前記差が前記閾値以上の場合、前記走行速度が前記基準速度を超えるまで、前記アイコンを非アクティブにすることによって前記自動操舵制御を開始させる操作を無効化し、
前記差が前記閾値よりも小さい場合、前記アイコンをアクティブにすることによって前記自動操舵制御を開始させる操作を可能にする、
請求項6に記載の作業車両。
【請求項9】
前記制御装置は、前記キーオフ操作が行われたときの前記作業車両の走行速度が閾値以上である場合、前記方位を前記不揮発性メモリに記憶することなく、または前記方位を次回使用されない態様で前記不揮発性メモリに記憶した上で、前記作業車両の動作を停止させる、請求項1から3のいずれか1項に記載の作業車両。
【請求項10】
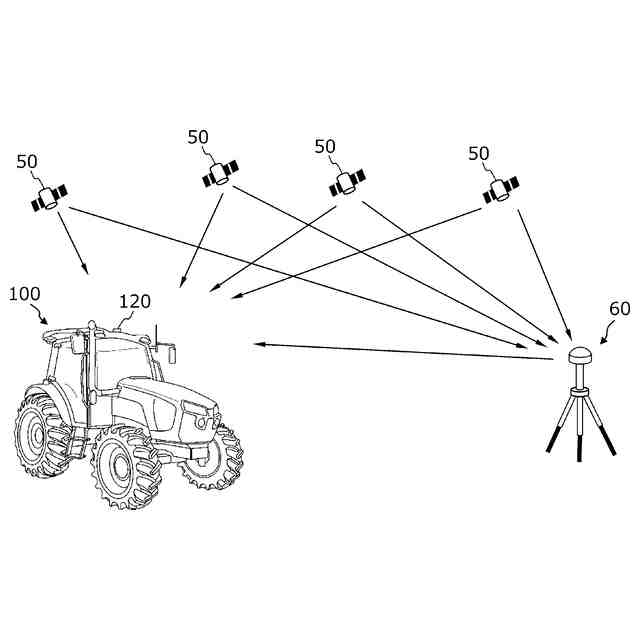
前記測位システムは、RTK-GNSSを利用して測位を行うGNSSユニットを含み、
前記制御装置は、前記キーオフ操作が行われたときに前記RTK-GNSSによる測位ができない状態である場合、前記方位を前記不揮発性メモリに記憶することなく、または前記方位を次回使用されない態様で前記不揮発性メモリに記憶させた上で、前記作業車両の動作を停止させる、請求項1から3のいずれか1項に記載の作業車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業車両、および作業車両を制御する方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
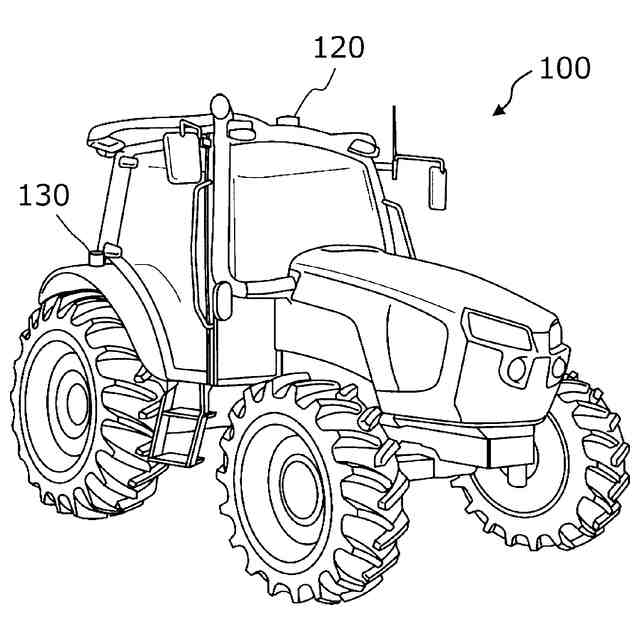
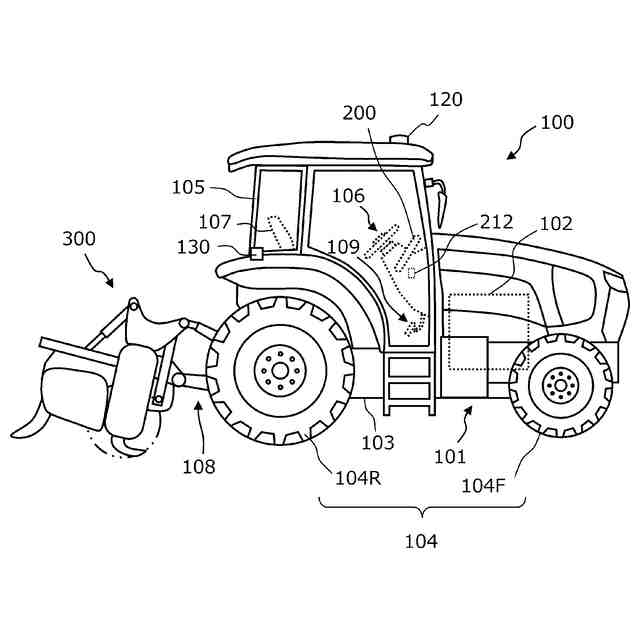
圃場で使用されるトラクタなどの作業車両の自動化に向けた研究開発が進められている。例えば、精密な測位が可能なGNSS(Global Navigation Satellite System)などの測位システムを利用して自動操舵で走行する作業車両が実用化されている。自動操舵に加えて速度制御を自動で行う作業車両も実用化されている。
【0003】
特許文献1は、車体が停止した状態であっても自律走行制御を有効にできる作業車両を開示している。特許文献1に開示された作業車両は、車体と、車体の自己位置を測定する測位装置と、自律走行制御を実行する制御装置と、自律走行制御を有効または無効に切り替える自律走行切替スイッチとを備える。制御装置は、測位装置によって測定された自己位置に基づき、車体が設定された方位に沿って走行するように、車体の舵角を調整する自律走行制御を実行する。制御装置は、車体が停止した場合、停止前の所定時間、および停止前の所定走行距離の少なくとも一方における走行軌跡から車体の方位を算出し、車体の停止中に自律走行切替スイッチが自律走行制御を有効にするように切り替えられた場合、算出した車体の方位と、設定された方位との差が第1所定範囲以内であることを条件に自律走行制御を有効にする。
【先行技術文献】
【特許文献】
【0004】
特開2022-166931号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自動操舵で走行する作業車両は、車体の方位を正確に検知することが求められる。車体の方位は、例えばGNSSなどの測位システムから取得した時系列の位置データに基づいて推定することができる。
【0006】
しかし、作業車両のキーオン操作(すなわちキースイッチをオンにする操作)が行われた後、運転者が増速操作を行って車速がある程度高くなるまで(例えば、0.45km/h以上になるまで)は、測位システムから取得した時系列の位置データに基づいて車体の方位を正確に推定することができない。したがって、従来は、作業車両のキーオン操作直後の極低速の状態では自動操舵を有効にすることができなかった。
【0007】
本開示は、キーオン操作直後の極低速の状態であっても自動操舵を有効化できる作業車両、および作業車両の制御方法を提供する。
【課題を解決するための手段】
【0008】
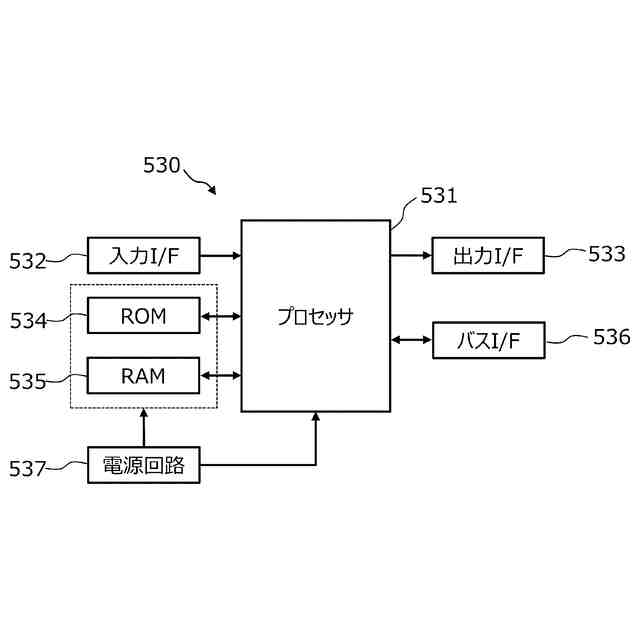
本開示の例示的な実施形態による作業車両は、自動操舵運転が可能な作業車両であって、前記作業車両の測位を行う測位システムと、不揮発性メモリを有する制御装置と、を備える。前記制御装置は、前記測位システムによって計測された位置の時間変化に基づいて前記作業車両の方位を推定し、前記作業車両の前記位置および前記方位と、設定された目標経路とに基づいて、前記作業車両の自動操舵制御を行い、前記作業車両のキーオフ操作に応答して、前記作業車両の前記方位を前記不揮発性メモリに記憶し、前記作業車両のキーオン操作が行われた後、前記不揮発性メモリに記憶された前記方位を前記作業車両の初期方位として前記自動操舵制御を開始する。
【0009】
本開示の包括的または具体的な態様は、装置、システム、方法、集積回路、コンピュータプログラム、もしくはコンピュータが読み取り可能な非一時的記憶媒体、またはこれらの任意の組み合わせによって実現され得る。コンピュータが読み取り可能な記憶媒体は、揮発性の記憶媒体を含んでいてもよいし、不揮発性の記憶媒体を含んでいてもよい。装置は、複数の装置で構成されていてもよい。装置が2つ以上の装置で構成される場合、当該2つ以上の装置は、1つの機器内に配置されてもよいし、分離した2つ以上の機器内に分かれて配置されていてもよい。
【発明の効果】
【0010】
本開示の実施形態によれば、キーオン操作直後の極低速の状態であっても自動操舵を有効化することが可能になる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
11日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
収穫機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
作業車
12日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
14日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
14日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業機械
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業機械
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
エンジン
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
エンジン
13日前
株式会社クボタ
エンジン
13日前
株式会社クボタ
キャビン
12日前
株式会社クボタ
キャビン
12日前
株式会社クボタ
キャビン
12日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業機械
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ