TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025019876
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123751
出願日
2023-07-28
発明の名称
入力機器
出願人
株式会社丸和製作所
代理人
個人
,
個人
主分類
G05G
5/03 20080401AFI20250131BHJP(制御;調整)
要約
【課題】ユーザに感じさせる手応えを様々に変更可能な入力機器を提供すること。
【解決手段】入力機器は、移動子314と、前記移動子314に対向して配置された固定子313とを有するアクチュエータ31と、ユーザの身体により加えられた押圧力を前記移動子314に伝達する伝達体34と、前記移動子314と前記固定子313とを挟んで前記伝達体の反対側に配置された圧力センサ37とを備え、前記アクチュエータ31は、前記圧力センサ37が検出した押圧力に基づいて生成された駆動信号により前記移動子314を移動させる。
【選択図】図5
特許請求の範囲
【請求項1】
移動子と、前記移動子に対向して配置された固定子とを有するアクチュエータと、
ユーザの身体により加えられた押圧力を前記移動子に伝達する伝達体と、
前記移動子と前記固定子とを挟んで前記伝達体の反対側に配置された圧力センサとを備え、
前記アクチュエータは、前記圧力センサが検出した押圧力に基づいて生成された駆動信号により前記移動子を移動させる
入力機器。
続きを表示(約 410 文字)
【請求項2】
前記圧力センサからの信号を出力する圧力センサ端子と、
前記アクチュエータに駆動信号を入力するアクチュエータ端子とを備える
請求項1に記載の入力機器。
【請求項3】
前記圧力センサが検出した押圧力に基づいて駆動信号を生成する制御回路を備える
請求項1に記載の入力機器。
【請求項4】
前記圧力センサが検出した押圧力に基づいて制御される被制御物に接続された
請求項1に記載の入力機器。
【請求項5】
前記アクチュエータは、前記移動子と前記固定子との間に配置された形状記憶合金ワイヤの収縮により動作する衝撃駆動型アクチュエータである
請求項1から請求項4のいずれか一つに記載の入力機器。
【請求項6】
前記移動子の移動により、前記ユーザの身体に触覚フィードバックを行なう
請求項5に記載の入力機器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、入力機器に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
スマートフォン等の情報機器のタッチパネルを透明板で覆い、ユーザが透明板を介してタッチパネルを操作した場合に、衝撃駆動型のアクチュエータを用いて透明板を動作させる触覚付与装置が提案されている(特許文献1)。タッチパネルの操作が受け付けられたことを、透明板の動作を介してユーザにフィードバックする、いわゆる触覚フィードバック機能を様々なタッチパネル方式の情報機器に付加できる。
【先行技術文献】
【特許文献】
【0003】
特開2019-128657号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
たとえばタクタイルスイッチ、押しボタンスイッチおよびフットスイッチ等の、タッチパネル以外の様々な入力機器が使用されている。これらの入力機器においては、たとえば板バネ、コイルバネおよびダンパーのような部品を組み合わせた機械式の構造を用いて、操作した際の手応えをユーザに感じさせる。しかしながら機械式の構造では、ユーザに感じさせる手応えを様々に変更することは難しい。
【0005】
一つの側面では、ユーザに感じさせる手応えを様々に変更可能な入力機器の提供を目的とする。
【課題を解決するための手段】
【0006】
入力機器は、移動子と、前記移動子に対向して配置された固定子とを有するアクチュエータと、ユーザの身体により加えられた押圧力を前記移動子に伝達する伝達体と、前記移動子と前記固定子とを挟んで前記伝達体の反対側に配置された圧力センサとを備え、前記アクチュエータは、前記圧力センサが検出した押圧力に基づいて生成された駆動信号により前記移動子を移動させる。
【発明の効果】
【0007】
一つの側面では、ユーザに感じさせる手応えを様々に変更可能な入力機器を提供できる。
【図面の簡単な説明】
【0008】
入力機器の斜視図である。
蓋を外した入力機器の正面図である。
図2におけるIII-III線による拡大断面図である。
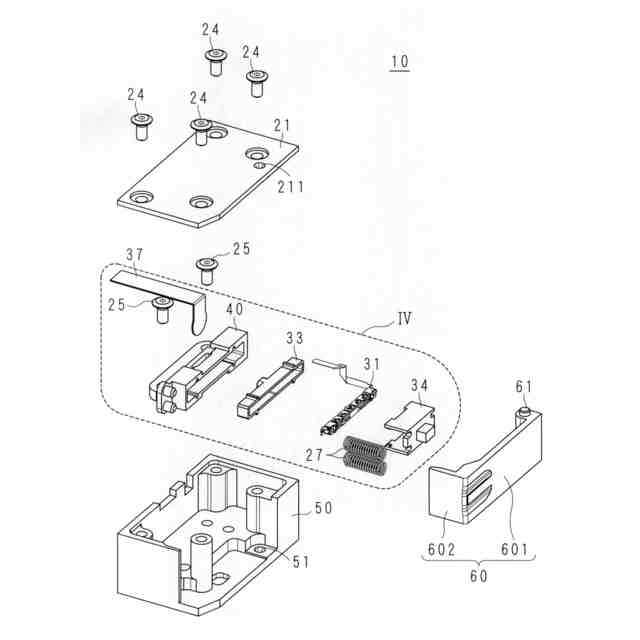
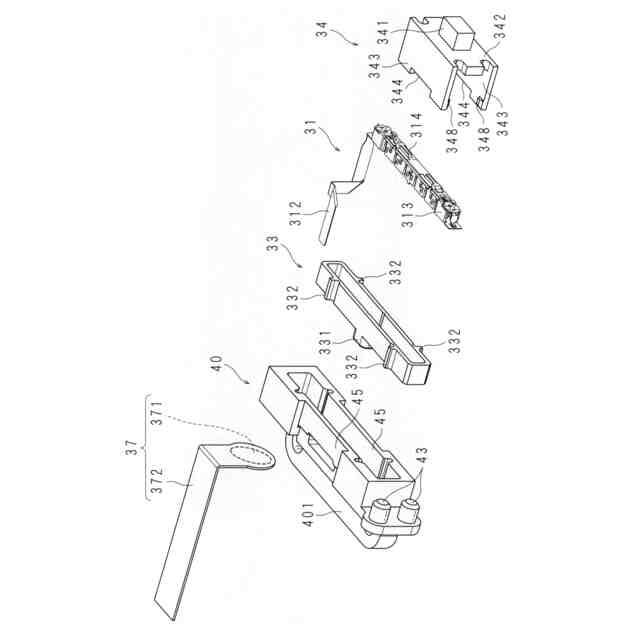
入力機器の分解斜視図である。
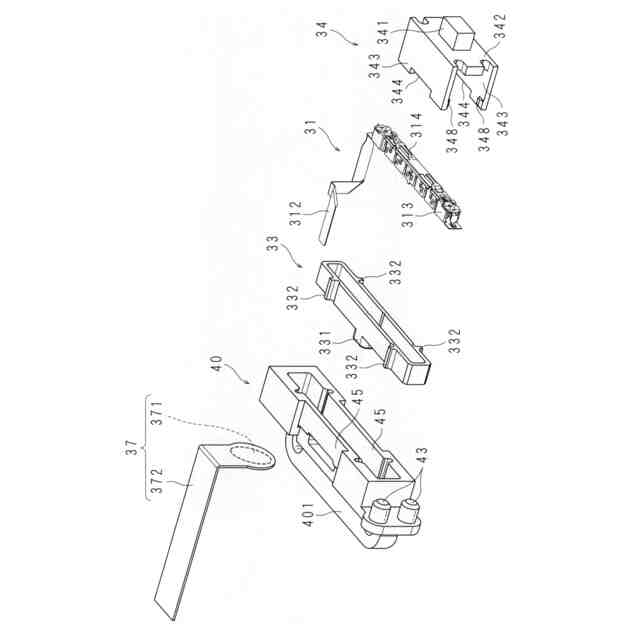
図4におけるIV部拡大図である。
アクチュエータ、アクチュエータケース、伝達体および圧力センサの半断面図である。
外ケースの斜視図である。
内ケースの斜視図である。
レバーの斜視図である。
レバーを押し込んだ状態を説明する説明図である。
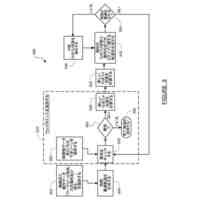
入力機器の制御回路を説明する説明図である。
押圧力と駆動信号との関係の例を示す表である。
実施の形態2の玩具を説明する説明図である。
実施の形態3の入力機器の斜視図である。
実施の形態3の入力機器の断面図である。
実施の形態3の入力機器の分解斜視図である。
ボタンを押し込んだ実施の形態3の入力機器の断面図である。
【発明を実施するための形態】
【0009】
[実施の形態1]
図1は、入力機器10の斜視図である。本実施の形態の入力機器10は、被制御物18(図11参照)に接続して使用される。入力機器10は、略直方体形状であり、略長方形箱型の外ケース50と、外ケース50の開口部を覆う蓋21と、レバー60とを備える。蓋21は、四本の外ケースネジ24により外ケース50に取り付けられている。ユーザが不用意に蓋21を外すことを防ぐために、外ケースネジ24は目隠し用のシール等により覆われていてもよい。
【0010】
レバー60は、外ケース50の一つの側面の大半の部分に対応する第1板601と、隣接する他の側面の一部に対応する第2板602とを備える略L字形である。第1板601のうち、第2板602に近い部分には、たとえば溝状の滑り止め603が設けられている。ユーザは、たとえば手指等の身体の一部で滑り止め603を押し込むことにより、被制御物18のON/OFF操作等を行なえる。外ケース50およびレバー60の形状の詳細については、後述する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
18日前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
12日前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
2日前
井関農機株式会社
作業車両
26日前
株式会社デンソー
診断装置
16日前
株式会社アイシン
自律移動体
2日前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
2日前
株式会社アイシン
自律移動体
2日前
FCLコンポーネント株式会社
電源回路および検出装置
12日前
株式会社アイシン
自律移動体
2日前
ローム株式会社
バイアス回路
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
株式会社マキタ
作業ロボット
18日前
ファナック株式会社
機械プログラミング方法
8日前
ローム株式会社
電源起動監視回路
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ