TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016099
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023119148
出願日
2023-07-21
発明の名称
無人作業システム
出願人
個人
代理人
個人
主分類
G05D
1/43 20240101AFI20250124BHJP(制御;調整)
要約
【課題】簡易な構成で、作業エリアに対して所定の作業を満遍なく行うことができる無人作業システムを提供することを目的とする。
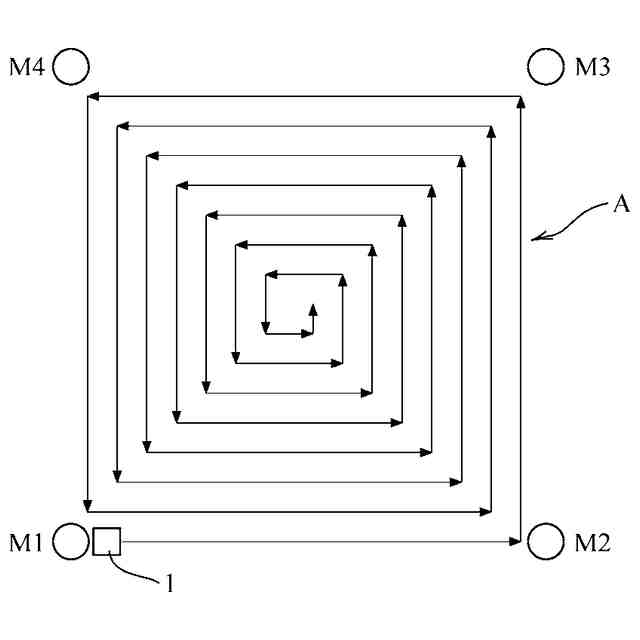
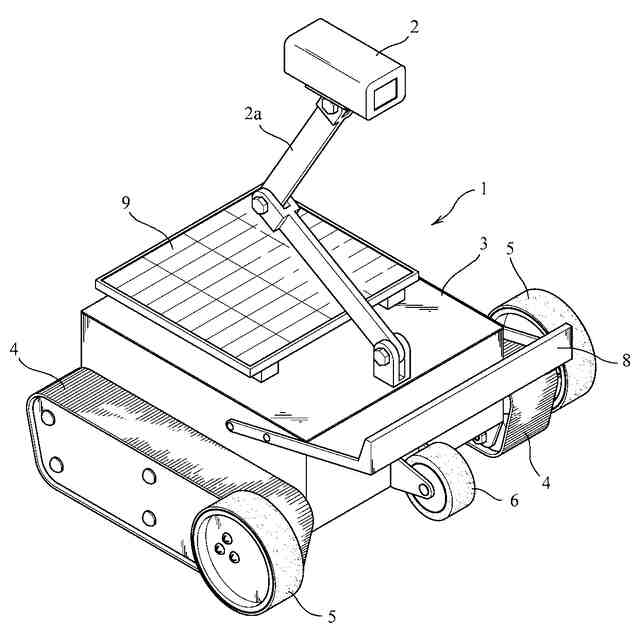
【解決手段】移動体1の前進・停止処理において、撮像部2で取得した画像中のマーカーMの画像に占める
高さ
を
画素数
で取得し、この
画素数
と、移動体1の移動を停止させる基準値である移動停止基準値とを比較し、
画素数
<移動停止基準値の場合は、移動体1を前進させ、
画素数
≧移動停止基準値の場合は、移動体1を停止させ、さらに、移動体1が転向する毎に
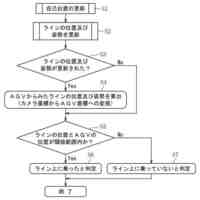
、停止位置補正処理及び移動方向補正処理を行い移
動体1が作業エリアA内を外側から
徐々に
内側に向かって旋回移動しながら所定の作業を行う無人作業システム。
【選択図】図1
特許請求の範囲
【請求項1】
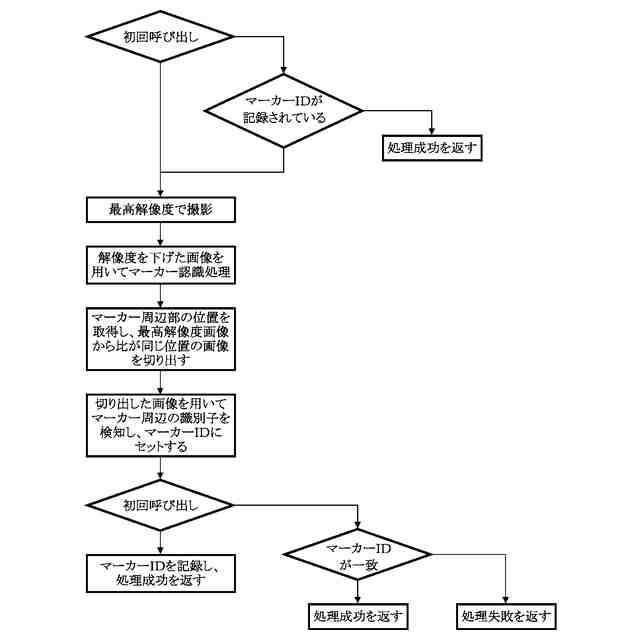
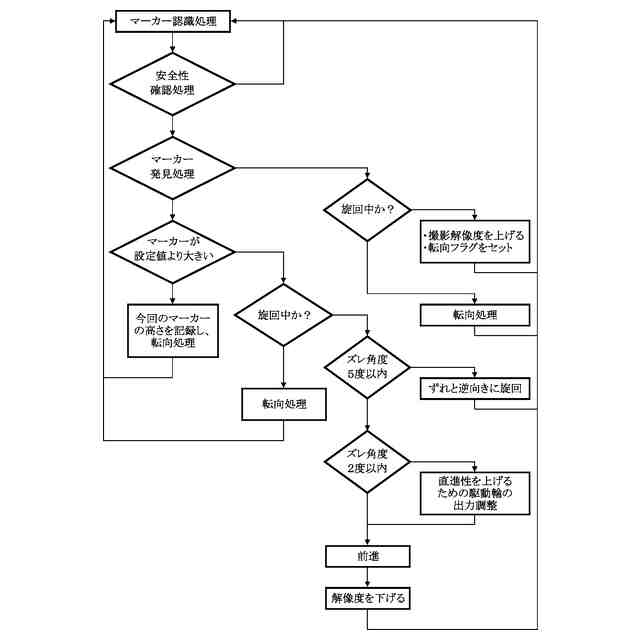
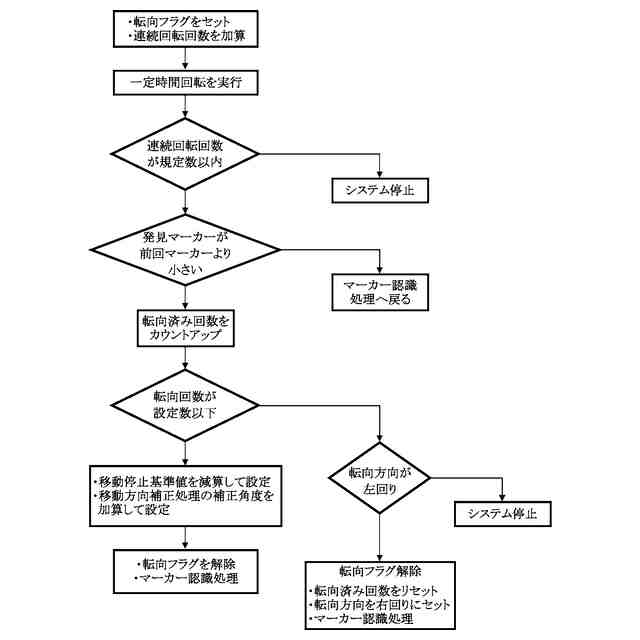
複数のマーカーを各コーナーに配置して区画した作業エリア内を、移動体を自律移動させて所定の作業を行う無人作業システムであって、前記移動体は、前方を撮像する撮像部と、この撮像部により取得した画像に基づき前記移動体の移動を制御する制御部とを備え、前記制御部は、前記撮像部により取得した前記画像中のマーカーを認識するマーカー認識処理と、前記画像中に認識したマーカーの該画像に占める大きさを数値で取得し、この取得した数値と、前記移動体の移動を停止させる基準値となる移動停止基準値とを比較し、前記取得した数値が前記移動停止基準値よりも小さい値の場合、前記移動体を前進させ、前記取得した数値が前記移動停止基準値以上の場合、前記移動体を停止させる前進・停止処理と、前記移動体の前進動作が停止した場合、前記移動体を所定方向に回転させて次の移動先となるマーカーを捜索し、発見したマーカーの方向に前記移動体を転向させる転向処理と、前記移動体が転向する毎に、前記前進・停止処理における前記移動停止基準値を減算し、転向後の前記移動体を、移動先マーカーに対して、一つ前の移動先マーカーに対する停止位置よりも手前で停止させる停止位置補正処理とを実行し、前記移動体が前進と転向を繰り返しながら前記作業エリア内を外側から内側に向かって旋回移動するように構成されていることを特徴とする無人作業システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載の無人作業システムにおいて、前記制御部は、前記移動体が転向する毎に、前記移動体の移動方向を該移動方向に存する移動先マーカーに対して所定量内側に補正する移動方向補正処理を実行し、さらに、この移動方向補正処理においては、前記移動体が転向する毎に前記所定量が増加していくように構成されていることを特徴とする無人作業システム。
【請求項3】
請求項1記載の無人作業システムにおいて、前記前進・停止処理における前記取得した数値は、前記撮像部により取得した画像中のマーカーの高さが占める画素数であり、また、前記移動停止基準値は、前記撮像部により取得した画像全体の縦画素数に所定係数を乗した値であることを特徴とする無人作業システム。
【請求項4】
請求項2記載の無人作業システムにおいて、前記前進・停止処理における前記取得した数値は、前記撮像部により取得した画像中のマーカーの高さが占める画素数であり、また、前記移動停止基準値は、前記撮像部により取得した画像全体の縦画素数に所定係数を乗した値であることを特徴とする無人作業システム。
【請求項5】
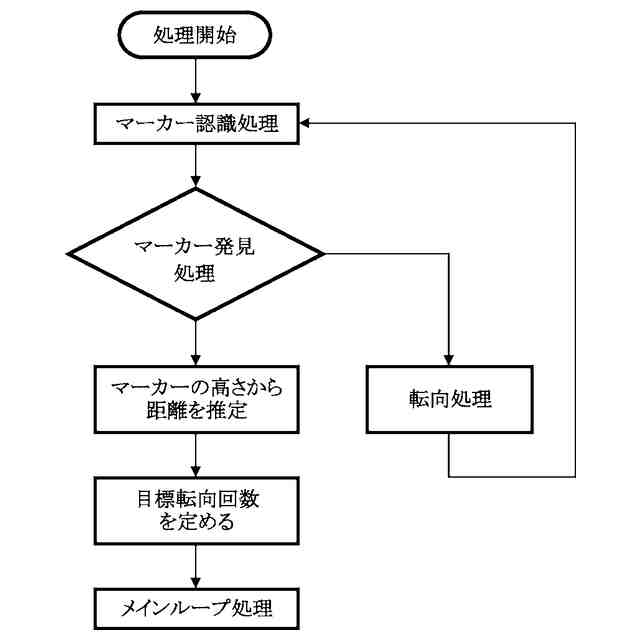
請求項1~4いずれか1項に記載の無人作業システムにおいて、前記制御部は、前記作業エリアの最長辺の長さを推定し、この最長辺の長さに基づき、前記移動体の前記作業エリアにおける前記旋回移動に要する転向回数を目標転向回数として設定する目標転向回数設定処理を実行し、前記移動体の転向回数が前記目標転向回数に到達した場合、前記移動体の移動を終了するように構成されていることを特徴とする無人作業システム。
【請求項6】
請求項5記載の無人作業システムにおいて、前記制御部は、前記移動体が左回りに旋回移動しながら前記所定の作業を行う左旋回移動処理と、前記移動体が右回りに旋回移動しながら前記所定の作業を行う右旋回移動処理とを実行し、一回目の旋回移動処理において前記移動体の転向回数が前記目標転向回数に到達した場合、前記移動体を任意のマーカー近傍に移動させ、この移動位置から前記一回目と逆回りに該一回目と同様の旋回移動処理を実行するように構成されていることを特徴とする無人作業システム。
【請求項7】
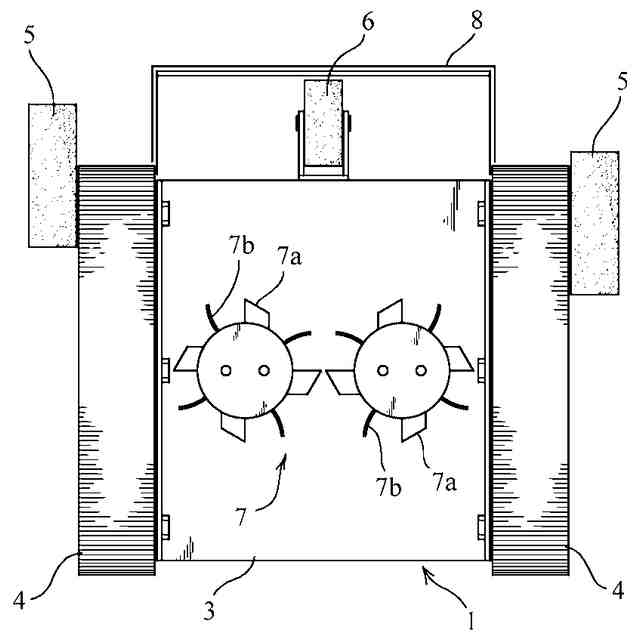
請求項1~4いずれか1項に記載の無人作業システムにおいて、前記移動体が行う前記所定の作業は、草刈り作業であることを特徴とする無人作業システム。
【請求項8】
請求項5記載の無人作業システムにおいて、前記移動体が行う前記所定の作業は、草刈り作業であることを特徴とする無人作業システム。
【請求項9】
請求項6記載の無人作業システムにおいて、前記移動体が行う前記所定の作業は、草刈り作業であることを特徴とする無人作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のマーカーで区画した作業エリア内を、移動体を自律移動させて所定の作業を行う無人作業システムに関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、複数のマーカーで区画した作業エリア内を、移動体を自律移動させて所定の作業を行う無人作業システムとして、特許文献1,2に開示されるシステムが提案されている。
【0003】
特許文献1に開示されるシステム(以下、「従来例1」という。)は、作業エリアの各コーナーに設置する複数のマーカーと、作業エリア内を移動する草刈機とを備え、マーカーは、波長の長い電磁波を発信する電磁波発信手段を備え、草刈機は、各電磁波発信手段から発信される電磁波を回転型アンテナで受信し、草刈機の基準線と各マーカーの角度から草刈機の位置を割り出す演算手段を備えるものであり、天気や障害物に影響を受けることなく、高い精度で作業エリア内における走行エリアを認識することができる点を特徴とするものである。
【0004】
また、特許文献2に開示されるシステム(以下、「従来例2」という。)は、進行方向の前方に配置される2つの標識を検出する検出装置と、検出装置の検出結果に基づいて、現在位置を原点とする前記2つの標識の座標を算出し、この座標から自律移動ロボットの目標経路を設定する目標経路設定装置とを備える自律移動ロボットを備えるものであり、標識をおくだけで、この標識によって囲まれた作業エリアにおいて自律移動ロボットが自律して移動しながら所定の作業を行うことを特徴とするものである。
【先行技術文献】
【特許文献】
【0005】
特開2014-149682号公報
特開2021-170287号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来例1のシステムに用いられるマーカーは、電磁波発信手段を備えるものであり、また、従来例2のシステムに用いられるマーカーは、距離測定部と方位測定部を備えるものであり、いずれのシステムも専用マーカーを用いるため、設備コストがかかり、また、マーカーの入手も容易でなく、簡易にマーカーを増設して作業エリアの区画変更を行うことができなかった。
【0007】
本発明は、このような従来例の問題点に鑑みなされたものであり、専用マーカーを必要とせず、たとえば市販のパイロン(三角コーン)などの安価で入手が容易なマーカーを用いて、移動体の作業エリア内の自律移動を制御し、作業エリアに対して所定の作業を満遍なく行うことができる無人作業システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
添付図面を参照して本発明の要旨を説明する。
【0009】
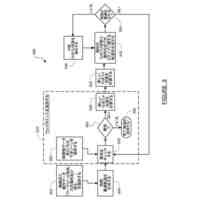
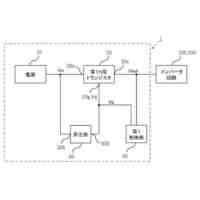
複数のマーカーMを各コーナーに配置して区画した作業エリアA内を、移動体1を自律移動させて所定の作業を行う無人作業システムであって、前記移動体1は、前方を撮像する撮像部2と、この撮像部2により取得した画像に基づき前記移動体1の移動を制御する制御部とを備え、前記制御部は、前記撮像部2により取得した前記画像中のマーカーMを認識するマーカー認識処理と、前記画像中に認識したマーカーMの該画像に占める大きさを数値で取得し、この取得した数値と、前記移動体1の移動を停止させる基準値となる移動停止基準値とを比較し、前記取得した数値が前記移動停止基準値よりも小さい値の場合、前記移動体1を前進させ、前記取得した数値が前記移動停止基準値以上の場合、前記移動体1を停止させる前進・停止処理と、前記移動体1の前進動作が停止した場合、前記移動体1を所定方向に回転させて次の移動先となるマーカーMを捜索し、発見したマーカーMの方向に前記移動体1を転向させる転向処理と、前記移動体1が転向する毎に、前記前進・停止処理における前記移動停止基準値を減算し、転向後の前記移動体1を、移動先マーカーMに対して、一つ前の移動先マーカーMに対する停止位置よりも手前で停止させる停止位置補正処理とを実行し、前記移動体1が前進と転向を繰り返しながら前記作業エリアA内を外側から内側に向かって旋回移動するように構成されていることを特徴とする無人作業システムに係るものである。
【0010】
また、請求項1記載の無人作業システムにおいて、前記制御部は、前記移動体1が転向する毎に、前記移動体1の移動方向を該移動方向に存する移動先マーカーMに対して所定量内側に補正する移動方向補正処理を実行し、さらに、この移動方向補正処理においては、前記移動体1が転向する毎に前記所定量が増加していくように構成されていることを特徴とする無人作業システムに係るものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
22日前
株式会社クボタ
作業車
25日前
株式会社ダイフク
搬送車
25日前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
22日前
トヨタ自動車株式会社
工作機械の制御装置
24日前
トヨタ自動車株式会社
工作機械の制御装置
23日前
株式会社やまびこ
走行制御装置
10日前
株式会社ダイフク
物品搬送設備
23日前
株式会社タブチ
減圧弁
4日前
株式会社ダイヘン
搬送車
22日前
株式会社ダイヘン
搬送車
22日前
株式会社ダイヘン
搬送車
22日前
株式会社ダイヘン
搬送車
22日前
井関農機株式会社
作業車両
18日前
株式会社デンソー
診断装置
8日前
ミツミ電機株式会社
多方向入力装置
28日前
ミツミ電機株式会社
多方向入力装置
28日前
ミツミ電機株式会社
多方向入力装置
28日前
オルガノ株式会社
運転管理方法及び運転管理装置
25日前
ローム株式会社
バイアス回路
24日前
ミツミ電機株式会社
多方向入力装置
28日前
ミツミ電機株式会社
多方向入力装置
28日前
FCLコンポーネント株式会社
電源回路および検出装置
4日前
株式会社マキタ
作業ロボット
10日前
ファナック株式会社
機械プログラミング方法
今日
ダイハツ工業株式会社
無人搬送車の制御方法
23日前
ファナック株式会社
工作機械の迅速な移動計画
今日
岩井ファルマテック株式会社
監査証跡の管理システム
1か月前
ローム株式会社
電源起動監視回路
23日前
ローム株式会社
レギュレータ回路
29日前
株式会社マキタ
自律移動システム
10日前
株式会社日立製作所
制御装置
10日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
28日前
トヨタ自動車株式会社
車両用ペダル装置
29日前
ソフトバンクグループ株式会社
システム
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ