TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018461
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122179
出願日
2023-07-27
発明の名称
工作機械
出願人
株式会社FUJI
代理人
弁理士法人ネクスト
,
個人
,
個人
主分類
G05B
19/404 20060101AFI20250130BHJP(制御;調整)
要約
【課題】象限切替えに伴うパラメータの調整を行う作業負担を軽減できる工作機械を提供すること。
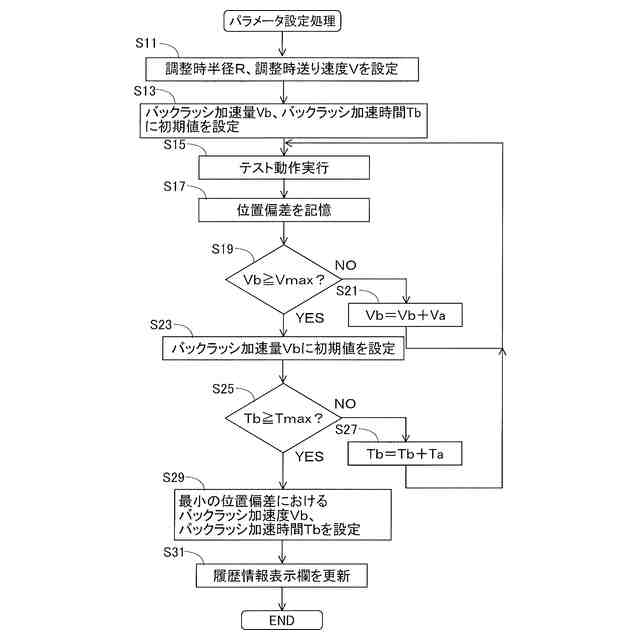
【解決手段】本開示の工作機械の制御装置は、制御プログラムに基づいてスライド装置を制御し移動対象物を移動させるテスト動作を実行し、且つ、移動対象物の移動方向を反転させる象限切替え時におけるパラメータであるバックラッシ加速量及びバックラッシ加速時間のうち、少なくとも一方のパラメータを変更した複数回のテスト動作を実行するテスト動作実行処理と、制御プログラムに基づいて指定した移動対象物の移動先の位置である指令位置と、移動対象物の実際の位置との位置偏差を、複数回のテスト動作の各々について取得し、複数回のテスト動作のうち、取得した位置偏差が他のテスト動作に比べて小さいテスト動作における少なくとも一方のパラメータを調整後のパラメータとして取得するパラメータ取得処理と、を実行する。
【選択図】図4
特許請求の範囲
【請求項1】
複数のスライド軸の各々に沿って移動対象物をスライド移動させるスライド装置と、
前記スライド装置を制御する制御装置と、
を備え、
前記制御装置は、
制御プログラムに基づいて前記スライド装置を制御し前記移動対象物を移動させるテスト動作を実行し、且つ、前記移動対象物の移動方向を反転させる象限切替え時におけるパラメータであるバックラッシ加速量及びバックラッシ加速時間のうち、少なくとも一方のパラメータを変更した複数回の前記テスト動作を実行するテスト動作実行処理と、
前記制御プログラムに基づいて指定した前記移動対象物の移動先の位置である指令位置と、前記移動対象物の実際の位置との位置偏差を、複数回の前記テスト動作の各々について取得し、複数回の前記テスト動作のうち、取得した前記位置偏差が他の前記テスト動作に比べて小さい前記テスト動作における前記少なくとも一方のパラメータを調整後のパラメータとして取得するパラメータ取得処理と、
を実行する、工作機械。
続きを表示(約 1,300 文字)
【請求項2】
前記制御装置は、
前記パラメータ取得処理において、取得した複数の前記位置偏差のうち、最も小さい前記位置偏差となった前記テスト動作における前記少なくとも一方のパラメータを、調整後のパラメータとして取得する、請求項1に記載の工作機械。
【請求項3】
ユーザインタフェースを、さらに備え、
前記制御装置は、
前記テスト動作実行処理において前記移動対象物を円弧形状の経路で移動させる動作を実行し、且つ、複数回の前記テスト動作を実行する前に、円弧形状の前記経路の半径の値を、前記ユーザインタフェースを介して受け付け、受け付けた前記半径の値と前記制御プログラムに基づいて複数回の前記テスト動作を実行する、請求項1又は請求項2に記載の工作機械。
【請求項4】
前記移動対象物は、
工具であり、
前記制御装置は、
前記テスト動作において前記制御プログラムに基づいて前記工具を移動させる送り速度の値を、前記ユーザインタフェースを介して受け付け、受け付けた前記送り速度の値と前記制御プログラムに基づいて複数回の前記テスト動作を実行する、請求項3に記載の工作機械。
【請求項5】
前記制御装置は、
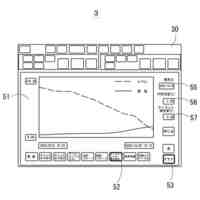
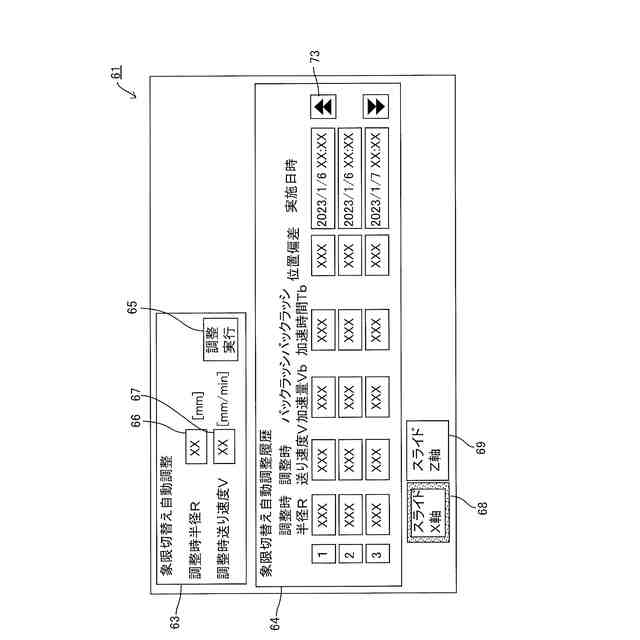
前記半径の値を入力する半径入力欄と、前記送り速度の値を入力する送り速度入力欄と、複数回の前記テスト動作の実行を開始させるテスト動作開始ボタンと、履歴情報表示欄と、を前記ユーザインタフェースに表示し、
前記テスト動作開始ボタンを操作された場合、前記半径入力欄に入力された前記半径の値、前記送り速度入力欄に入力された前記送り速度の値、及び前記制御プログラムに基づいて複数回の前記テスト動作を実行し、
複数回の前記テスト動作を実行した後、前記半径入力欄に入力された前記半径の値、前記送り速度入力欄に入力された前記送り速度の値、複数回の前記テスト動作を実行し調整後のパラメータとして取得した前記少なくとも一方のパラメータ、調整後の前記少なくとも一方のパラメータを設定して前記テスト動作を実行した際の前記位置偏差、及び複数回の前記テスト動作を開始した日時を、関連付けて前記履歴情報表示欄に表示する、請求項
4に記載の工作機械。
【請求項6】
前記スライド装置は、
第1スライド軸と、前記第1スライド軸と交差する第2スライド軸との各々に沿って、前記移動対象物をスライド移動させることが可能であり、
前記制御装置は、
前記第1スライド軸、及び前記第2スライド軸の各々について、前記テスト動作実行処理及び前記パラメータ取得処理を実行可能であり、前記テスト動作実行処理及び前記パラメータ取得処理を実行する対象のスライド軸として前記第1スライド軸又は前記第2スライド軸のどちらを選択するのかを、前記ユーザインタフェースを介して受け付け、選択されたスライド軸での前記テスト動作で用いる前記半径の値及び前記送り速度の値を、前記ユーザインタフェースを介して受け付ける、請求項4に記載の工作機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、工作機械における象限切替えに関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
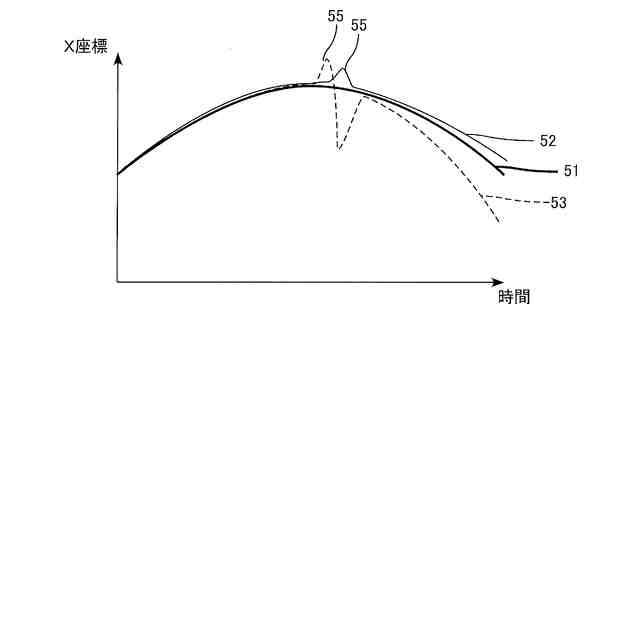
従来、工作機械では、工具等の移動対象物をスライド軸に沿ってスライド移動させ、ワークの加工を実行する。また、加工中に移動対象物をスライド移動させる方向を反転させる場合がある。例えば、移動対象物として工具をスライド移動させワークを円弧形状に加工する場合、円弧形状の頂点となる部分で工具のスライド方向が反転する。この反転動作により加工面に所謂象限突起が形成される可能性がある。具体的には、移動対象物をスライド移動させる装置に発生する摩擦力は、移動対象物の移動方向とは反対方向に作用する。移動対象物の移動方向が反転すると、発生した摩擦力により反転時の始動に遅れが発生し制御に遅れが発生することで、指令に対する応答の誤差が発生する。例えば、象限が切り替わった直後は、移動対象物の軌跡が指令の軌跡よりも外側へ僅かに膨らんだ象限突起が発生する。
【先行技術文献】
【特許文献】
【0003】
特開2022-90946号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1の工作機械では、反転時におけるバックラッシ加速量(文献では、設定加速量)を調整することで、象限突起を抑制している。しかしながら、バックラッシ加速量などのパラメータは、工具の重さ、経年劣化などの機器固有の条件に応じて工作機械ごとに調整する必要があり、調整作業の負担が増加する虞があった。
【0005】
本開示は、上記の課題に鑑みてなされたものであり、象限切替えに伴うパラメータの調整を行う作業負担を軽減できる工作機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本明細書は、複数のスライド軸の各々に沿って移動対象物をスライド移動させるスライド装置と、前記スライド装置を制御する制御装置と、を備え、前記制御装置は、制御プログラムに基づいて前記スライド装置を制御し前記移動対象物を移動させるテスト動作を実行し、且つ、前記移動対象物の移動方向を反転させる象限切替え時におけるパラメータであるバックラッシ加速量及びバックラッシ加速時間のうち、少なくとも一方のパラメータを変更した複数回の前記テスト動作を実行するテスト動作実行処理と、前記制御プログラムに基づいて指定した前記移動対象物の移動先の位置である指令位置と、前記移動対象物の実際の位置との位置偏差を、複数回の前記テスト動作の各々について取得し、複数回の前記テスト動作のうち、取得した前記位置偏差が他の前記テスト動作に比べて小さい前記テスト動作における前記少なくとも一方のパラメータを調整後のパラメータとして取得するパラメータ取得処理と、を実行する、工作機械を開示する。
【発明の効果】
【0007】
本開示の工作機械によれば、制御装置は、制御プログラムに基づいて移動対象物を移動させるテスト動作を実行する。この際、制御装置は、バックラッシ加速量及びバックラッシ加速時間のうち、少なくとも一方のパラメータを変更しながら複数回のテスト動作を実
行する。制御装置は、実行した複数回のテスト動作のうち、制御プログラムの指令位置と、実際の位置の位置偏差がより小さいテスト動作におけるパラメータを、調整後のパラメータとして取得する。これにより、指令位置に対してずれが少ないパラメータを見つけるこができ、見つけ出したパラメータを設定することで、結果として象限突起をより小さく又はなくすことが可能となる。作業者がパラメータの調整を行う作業負担を軽減できる。
【図面の簡単な説明】
【0008】
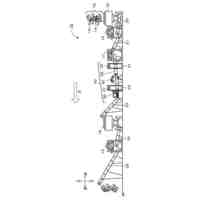
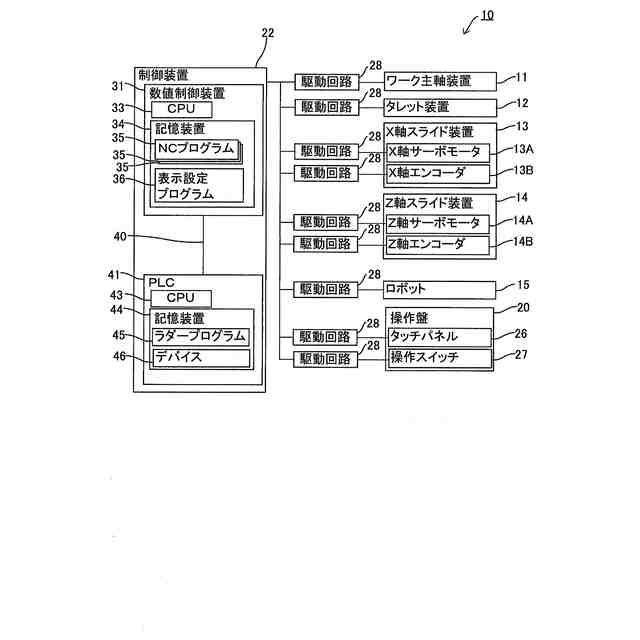
本実施例に係わる工作機械のブロック図。
円弧形状の加工におけるX座標と、時間の関係を示すグラフであって、異なるバックラッシ加速量及びバックラッシ加速時間を設定したグラフを示す図。
受付画面を示す図。
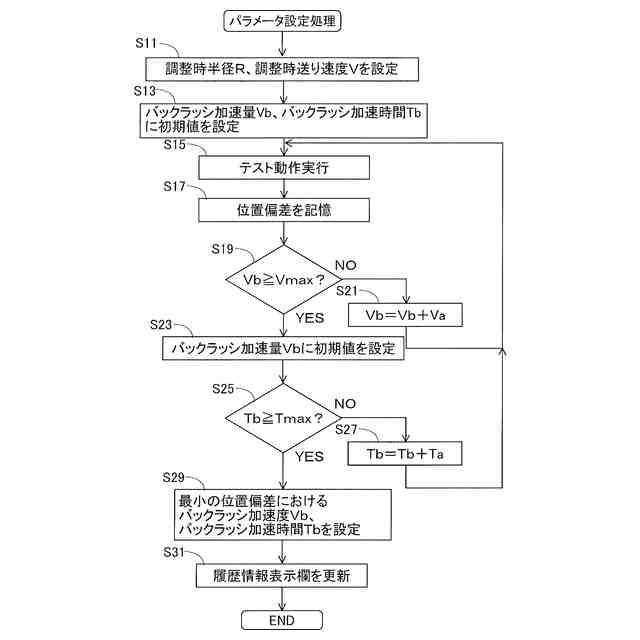
パラメータ設定処理を示すフローチャート。
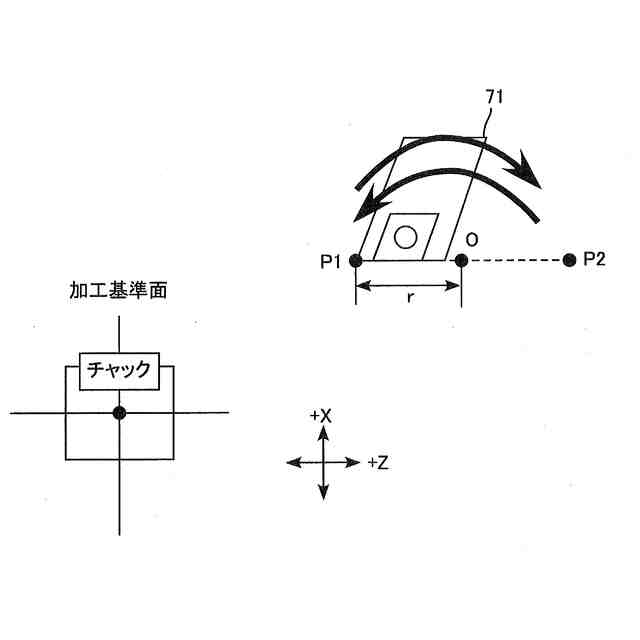
X軸方向における反転を発生させるテスト動作を示す模式図。
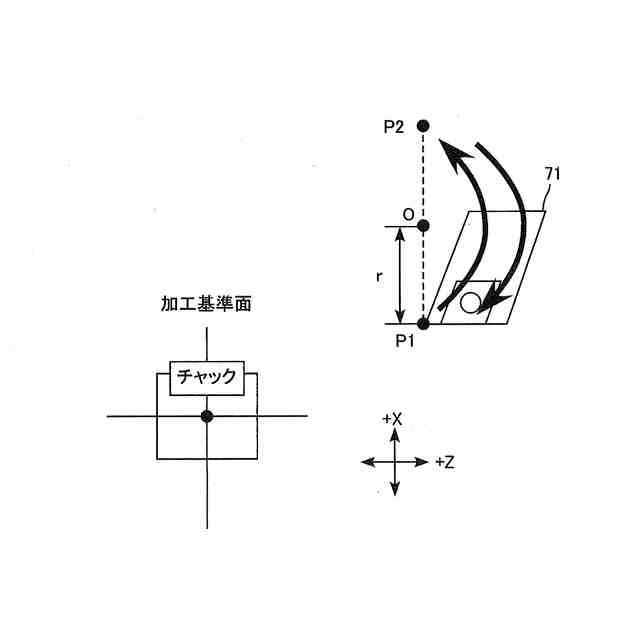
Z軸方向における反転を発生させるテスト動作を示す模式図。
【発明を実施するための形態】
【0009】
以下、本開示の工作機械を具体化した一実施例について、図面を参照しつつ詳しく説明する。図1は、本実施例に係る工作機械10のブロック図を示している。図1に示すように、工作機械10は、例えば、旋盤であり、ワーク主軸装置11、タレット装置12、X軸スライド装置13、Z軸スライド装置14、ロボット15、操作盤20、制御装置22を備えている。尚、図1に示す工作機械10の構成は、一例である。例えば、工作機械10は、ワーク主軸装置11及びタレット装置12を複数組備える旋盤でも良く、旋盤に加えて工具主軸装置を備える、所謂複合加工機でも良い。従って、本開示の工作機械としては、旋盤に限らず、例えば、マシニングセンタ、フライス盤、ボール盤など、様々な構成の工作機械を採用できる。そして、各種の工作機械において、後述するバックラッシ加速量Vb及びバックラッシ加速時間Tbのテスト動作を実行しても良い。
【0010】
ワーク主軸装置11は、ワークを把持するチャック機構(チャック爪やコレットチャックなど)を備え、把持したワークを、ワーク主軸を中心に回転させる。タレット装置12は、複数の工具(切削工具や回転工具などのタレット工具)を取り付け可能な刃物台と、刃物台を回転させる回転駆動機構を備えている。タレット装置12は、回転駆動機構を駆動して刃物台を回転させ作業位置に割り出す工具を変更し、作業位置に割り出した工具を用いてワーク主軸装置11に把持されたワークに対する加工を実行する。尚、刃物台は、タレット型の刃物台に限らず、クシ刃形の刃物台等でも良い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
3日前
株式会社FUJI
3次元造形装置およびパレット検出方法
1日前
株式会社FUJI
実装装置、画像処理装置および画像処理方法
2日前
株式会社FUJI
廃材処理システム
今日
エイブリック株式会社
基準電圧回路
今日
和研工業株式会社
多連レバー機構
13日前
株式会社クボタ
作業車
3日前
スター精密株式会社
工作機械
29日前
株式会社ダイフク
搬送車
3日前
ローム株式会社
半導体集積回路
8日前
エイブリック株式会社
ボルテージレギュレータ
今日
トヨタ自動車株式会社
工作機械の制御装置
2日前
トヨタ自動車株式会社
工作機械の制御装置
1日前
愛知機械テクノシステム株式会社
無人搬送車
22日前
株式会社ダイフク
物品搬送設備
1日前
アズビル株式会社
制御システムおよび制御方法
23日前
アズビル株式会社
制御システムおよび制御方法
14日前
アズビル株式会社
制御システムおよび制御方法
14日前
日本精工株式会社
制御装置および制御方法
20日前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
チームラボ株式会社
走行システム及び走行路
27日前
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
村田機械株式会社
稼働監視システム及び稼働監視方法
23日前
日本精工株式会社
制御システムおよび制御方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
22日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
オルガノ株式会社
運転管理方法及び運転管理装置
3日前
ローム株式会社
バイアス回路
2日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ