TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025006554
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107426
出願日
2023-06-29
発明の名称
ロボットシステム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20250109BHJP(制御;調整)
要約
【課題】精度よく荷物を運搬することができるロボットシステムを提供する。
【解決手段】荷物200を荷下ろし場所3に運搬するロボットシステム1であって、ロボット100が、荷物200を持ち上げるために荷物200の下まで移動する本体部10と、荷物200までの距離を検出する距離センサ13と、マーカ300の画像を撮像するカメラ21と、本体部10よりも高い位置でカメラ21を支持する支持部材20と、ロボット100が荷物200に接近するときは、距離センサ13の検出結果に応じてロボット100を荷物200まで移動し、ロボット100が荷下ろし場所3に接近するときは、マーカ300の画像に応じてロボット100を荷下ろし場所3まで移動するように、ロボットを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
荷物を荷下ろし場所に運搬するロボットシステムであって、
ロボットが、
前記荷物を持ち上げるために荷物の下まで移動する本体部と、
前記荷物までの距離を検出する距離センサと、
床面に形成されたマーカを撮像するカメラと、
前記本体部に取り付けられ、前記本体部よりも高い位置で前記カメラを支持する支持部材と、
前記ロボットが荷物に接近するときは、前記距離センサでの検出結果に応じて前記ロボットを荷物まで移動し、前記ロボットが荷下ろし場所に接近するときは、前記マーカの画像に応じてロボットを荷下ろし場所まで移動するように、ロボットを制御する制御部と、を備えたロボットシステム。
続きを表示(約 250 文字)
【請求項2】
前記マーカが前記荷下ろし場所の内側に形成されている請求項1に記載のロボットシステム。
【請求項3】
前記荷下ろし場所の前記ロボットから遠い側の端部に前記マーカが形成されている請求項2に記載のロボットシステム。
【請求項4】
前記荷物が、前記本体部よりも高い脚部によって支持されている請求項1~3のいずれか1項に記載のロボットシステム。
【請求項5】
前記脚部は、光を反射する反射部材を含んでいる請求項4に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1は、台車を搬送する移動体を開示している。特許文献1の移動体は台車の下側に移動体本体部が入り込んだ状態で、移動体が台車を持ち上げている。
【先行技術文献】
【特許文献】
【0003】
特開2022-128197号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の移動体は、加速度センサ、速度センサ又はジャイロセンサを含んでいる。これらのセンサが移動体の挙動を検知している。特許文献1の移動体は、LiDAR又はレーダを用いて、検知領域の周辺状況を検知している。LiDARは、移動体と物体との距離、及び物体の方向を検知している。しかしながら、台車を下ろす荷下ろし位置に接近する場合、位置精度が低下してしまうおそれがある。よって、適切な位置に台車を下ろすことができない場合がある。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、荷物を精度よく運搬することができるロボットシステムを提供する。
【課題を解決するための手段】
【0006】
本開示の一態様のロボットシステムは、荷物を荷下ろし場所に運搬するロボットシステムであって、ロボットが、前記荷物を持ち上げるために荷物の下まで移動する本体部と、前記荷物までの距離を検出する距離センサと、前記床面に形成されたマーカのマーカ画像を撮像するカメラと、前記本体部に取り付けられ、前記本体部よりも高い位置で前記カメラを支持する支持部材と、前記ロボットが荷物に接近するときは、前記距離センサでの検出結果に応じて前記ロボットを荷物まで移動し、前記ロボットが荷下ろし場所に接近するときは、前記マーカの画像に応じてロボットを荷下ろし場所まで移動するように、ロボットを制御する制御部と、を備えている。
【発明の効果】
【0007】
本開示によれば、荷物を精度よく運搬することができるロボットシステムを提供することができる。
【図面の簡単な説明】
【0008】
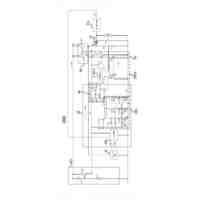
ロボットシステムの全体構成を示す模式図である。
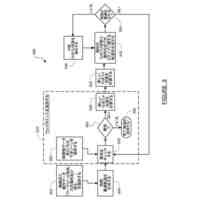
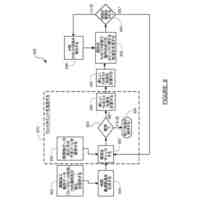
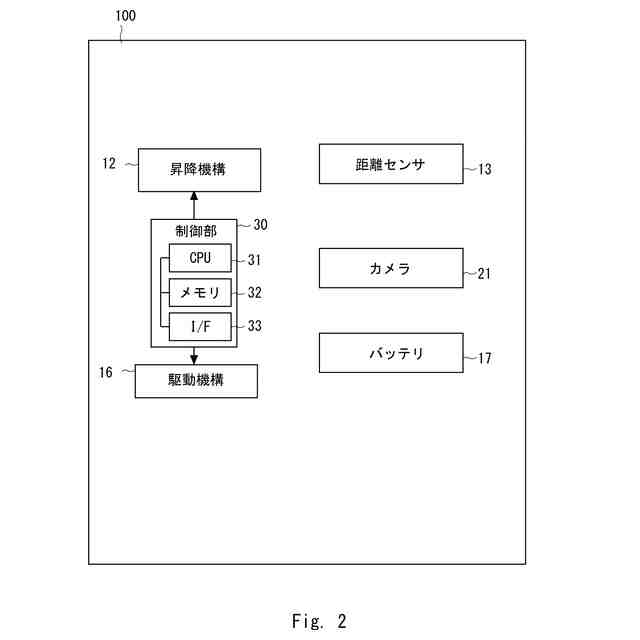
ロボットの制御系を示すブロック図である。
荷物の積み込み時の動作を説明するための図である。
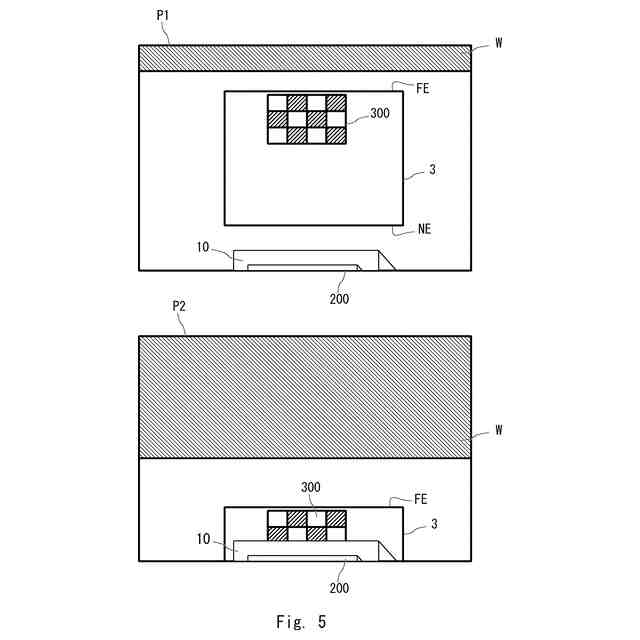
荷下ろし時の動作を説明するための図である。
カメラの画角を説明するための模式図である。
【発明を実施するための形態】
【0009】
以下、本開示を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。但し、本開示が以下の実施の形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。図が煩雑にならないように、いくつかの符号及びハッチングが省略されている。
【0010】
以下、図面を参照して実施形態に係るロボットシステム1について説明する。図1は、ロボットシステムの全体構成を示す模式図である。図2は、ロボット100の構成を示す制御ブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
29日前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
29日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
17日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社タブチ
減圧弁
11日前
日本信号株式会社
自走式装置
1日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
井関農機株式会社
作業車両
25日前
株式会社デンソー
診断装置
15日前
FCLコンポーネント株式会社
電源回路および検出装置
11日前
ローム株式会社
バイアス回路
1か月前
株式会社アイシン
自律移動体
1日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
株式会社アイシン
自律移動体
1日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
1日前
株式会社アイシン
自律移動体
1日前
株式会社マキタ
作業ロボット
17日前
ファナック株式会社
機械プログラミング方法
7日前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
ローム株式会社
レギュレータ回路
1か月前
ファナック株式会社
工作機械の迅速な移動計画
7日前
ローム株式会社
電源起動監視回路
1か月前
株式会社マキタ
自律移動システム
17日前
株式会社日立製作所
制御装置
17日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ