TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014863
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117787
出願日
2023-07-19
発明の名称
物品搬送設備
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/43 20240101AFI20250123BHJP(制御;調整)
要約
【課題】物品の搬送効率を高めやすい物品搬送設備を提供する。
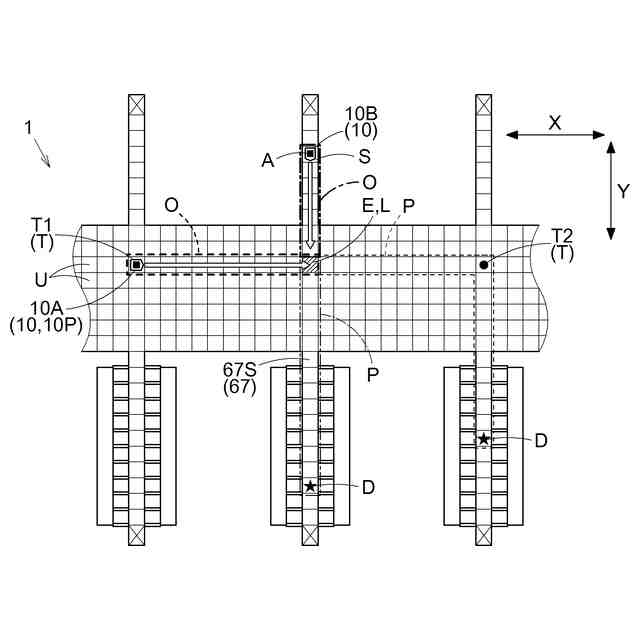
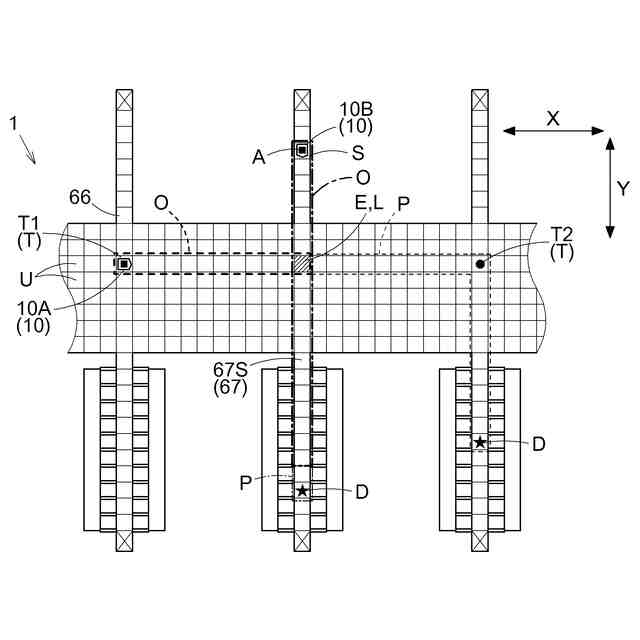
【解決手段】物品搬送設備(1)は、複数の搬送車(10)と、搬送車(10)を制御する制御システムとを備える。制御システムは、搬送車(10)の現在位置から目的地点(D)までの走行経路(P)に沿う進行方向前方に占有エリア(O)を設定する。制御システムは、複数の搬送車(10)の占有エリア(O)どうしが重複した場合には、重複エリア(L)を先に占有エリア(O)に設定した搬送車(10)を優先搬送車(10P)として重複エリア(L)を先に通過させる。
【選択図】図8
特許請求の範囲
【請求項1】
フロアを走行して物品を搬送する複数の搬送車と、前記搬送車を制御する制御システムと、を備える物品搬送設備であって、
前記制御システムは、
前記フロアを、前記搬送車が収まる大きさの複数の単位エリアに区画して管理し、
前記搬送車を、出発地点の前記単位エリアから目的地点の前記単位エリアまで、隣接する前記単位エリアを順に移動して走行させるように制御し、
複数の前記搬送車のそれぞれを対象搬送車として、前記対象搬送車の現在位置から前記目的地点までの走行経路に沿う進行方向前方に、設定予約数の前記単位エリアを前記対象搬送車の占有エリアに設定し、
同じ前記単位エリアが複数の前記搬送車の前記占有エリアとして重複した場合には、当該重複した前記単位エリアである重複エリアを先に前記占有エリアに設定した前記搬送車を優先搬送車とし、前記優先搬送車が前記重複エリアを通過した後に、前記重複エリアを前記占有エリアに設定した他の前記搬送車を前記重複エリアに移動させる、物品搬送設備。
続きを表示(約 1,200 文字)
【請求項2】
前記搬送車に前記物品を供給する供給部と、
前記搬送車から前記物品を受け入れる複数の受入部と、をさらに備え、
前記フロアに沿う方向のうちの特定の方向をX方向とし、前記フロアに沿う方向のうち前記X方向に直交する方向をY方向として、
複数の前記受入部が、前記X方向に互いに離間して配置され、
前記供給部と複数の前記受入部とが、前記Y方向に離間して配置され、
前記制御システムは、前記搬送車の進行方向が前記Y方向に沿う場合の前記設定予約数である第1設定予約数を、前記搬送車の進行方向が前記X方向に沿う場合の前記設定予約数である第2設定予約数よりも多くする、請求項1に記載の物品搬送設備。
【請求項3】
前記フロアには、前記供給部が設けられた供給エリアと、それぞれ前記Y方向に沿って延在するとともに前記X方向に並ぶように配置された複数の通路エリアと、前記供給エリアと複数の前記通路エリアとを接続する接続エリアと、が設定され、
複数の前記通路エリアのそれぞれに沿って複数の前記受入部が配置され、
前記接続エリアは、前記供給エリアの出口部と複数の前記通路エリアのそれぞれの入口である通路入口部とを互いに接続するように、前記X方向及び前記Y方向に広がりを有するエリアであり、
前記出口部とは異なる前記X方向の位置に配置された前記通路入口部であって、前記出口部との前記X方向の距離が最も近い前記通路入口部を対象入口部として、
前記制御システムは、前記X方向における、前記出口部に対応する前記単位エリアから前記対象入口部に対応する前記単位エリアまでの前記単位エリアの数以下の数を、前記第2設定予約数とする、請求項2に記載の物品搬送設備。
【請求項4】
前記制御システムは、前記X方向における前記対象入口部に対応する前記単位エリアである入口対応エリアに向かって前記X方向に沿って走行中の前記搬送車についての前記第2設定予約数を、前記X方向における、前記対象搬送車の現在位置に対応する前記単位エリアから前記入口対応エリアまでの前記単位エリアの数とする、請求項3に記載の物品搬送設備。
【請求項5】
前記制御システムは、前記第1設定予約数を、前記搬送車が予め定められた最高速度まで加速した後、予め定められた減速度で減速して停止するまでの走行距離に応じた前記単位エリアの数とする、請求項2から4のいずれか一項に記載の物品搬送設備。
【請求項6】
前記制御システムは、前記対象搬送車の前記走行経路中に進行方向を変更する方向転換箇所がある場合には、前記対象搬送車が前記方向転換箇所に到達するまでは、当該方向転換箇所までの前記走行経路に対応する前記占有エリアだけを設定し、前記対象搬送車が前記方向転換箇所に到達してから、当該方向転換箇所からの前記走行経路に対応する前記占有エリアを設定する、請求項1から4のいずれか一項に記載の物品搬送設備。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品搬送設備に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば物流倉庫等において、物品を搬送するのに物品搬送設備が利用されている。このような物品搬送設備の一例が、特開2020-100482号公報(特許文献1)に開示されている。特許文献1の物品搬送設備(物品搬送設備F)は、物品(物品W)を搬送する複数の搬送車(物品搬送車V)と、搬送車を制御する制御システム(統括制御装置Cf)とを備えている。
【0003】
特許文献1の物品搬送設備では、搬送車はフロア(床面70)上を縦横に自在に走行可能となっており、複数の搬送車の走行経路が互いに交差する場合が生じ得る。このような場合に、搬送車どうしの衝突を回避しようとすれば、走行経路の交差箇所に一方の搬送車だけを進入させて他方の搬送車を待機させることが考えられる。この場合において、衝突回避を判定すべき対象の走行経路が長ければ長いほど交差箇所が多くなり、それに伴い、待機させる搬送車が増加して搬送効率が低下するという問題があった。
【先行技術文献】
【特許文献】
【0004】
特開2020-100482号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、物品の搬送効率を高めやすい物品搬送設備の実現が望まれる。
【課題を解決するための手段】
【0006】
本開示に係る物品搬送設備は、
フロアを走行して物品を搬送する複数の搬送車と、前記搬送車を制御する制御システムと、を備える物品搬送設備であって、
前記制御システムは、
前記フロアを、前記搬送車が収まる大きさの複数の単位エリアに区画して管理し、
前記搬送車を、出発地点の前記単位エリアから目的地点の前記単位エリアまで、隣接する前記単位エリアを順に移動して走行させるように制御し、
複数の前記搬送車のそれぞれを対象搬送車として、前記対象搬送車の現在位置から前記目的地点までの走行経路に沿う進行方向前方に、設定予約数の前記単位エリアを前記対象搬送車の占有エリアに設定し、
同じ前記単位エリアが複数の前記搬送車の前記占有エリアとして重複した場合には、当該重複した前記単位エリアである重複エリアを先に前記占有エリアに設定した前記搬送車を優先搬送車とし、前記優先搬送車が前記重複エリアを通過した後に、前記重複エリアを前記占有エリアに設定した他の前記搬送車を前記重複エリアに移動させる。
【0007】
この構成によれば、複数の搬送車どうしが衝突することを回避しつつ、それら複数の搬送車のそれぞれを目的地点まで適切に走行させることができる。その際、それぞれの搬送車について、目的地点までの走行経路に沿う進行方向前方に設定予約数分の単位エリアだけを占有エリアに設定するため、占有エリアどうしが重複する重複エリアが必要以上に多く生じることを回避できる。これにより、それぞれの搬送車が他の搬送車との衝突を回避するために過度に頻繁に減速したり停止したりすることを回避できる。よって、それぞれの搬送車の走行速度を高めやすく、その結果、物品搬送設備の全体としての物品の搬送効率を高めやすい。
【0008】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
【0009】
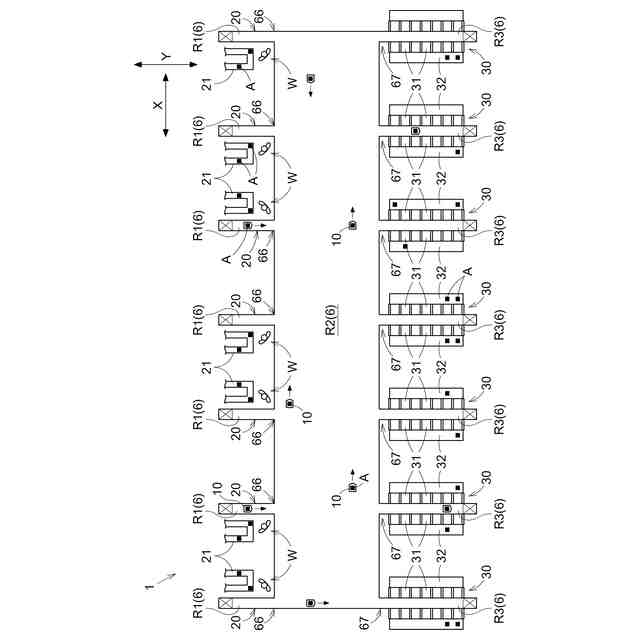
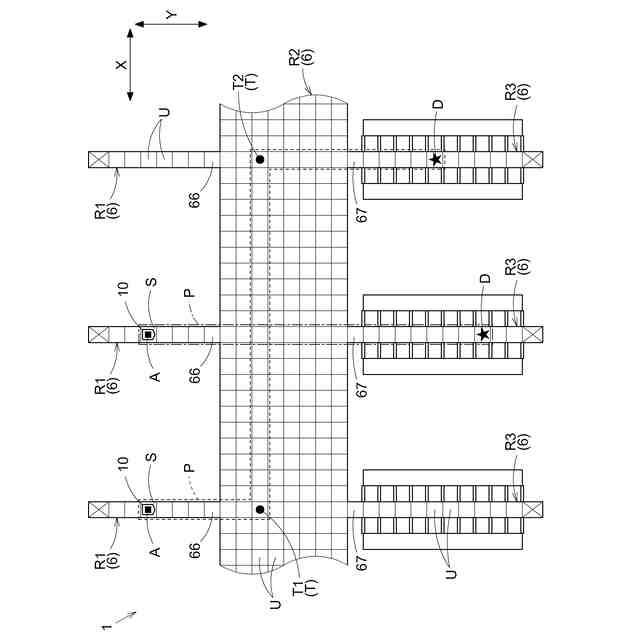
実施形態の物品搬送設備を含む物品仕分け設備の平面図
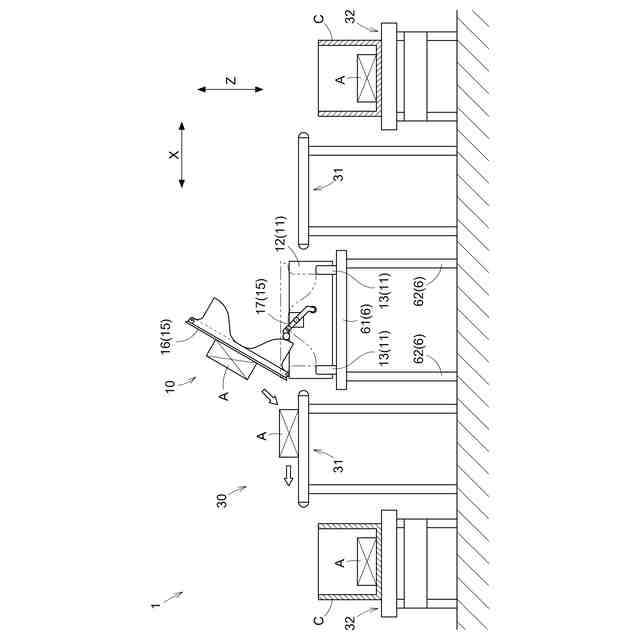
通路エリアの正面図
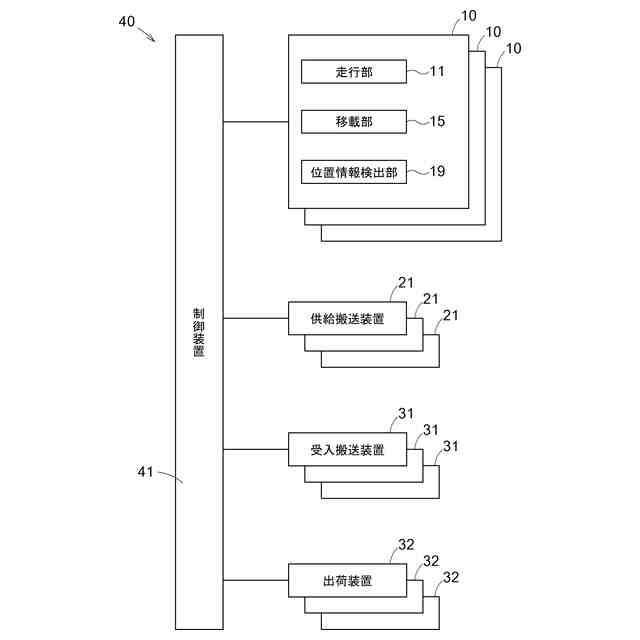
制御システムのブロック図
搬送車の走行経路の一例を示す模式図
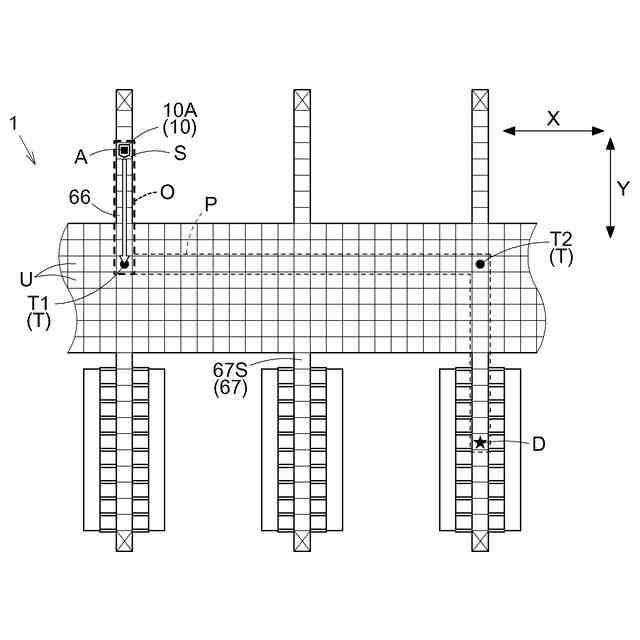
進路予約処理の一例を示す模式図
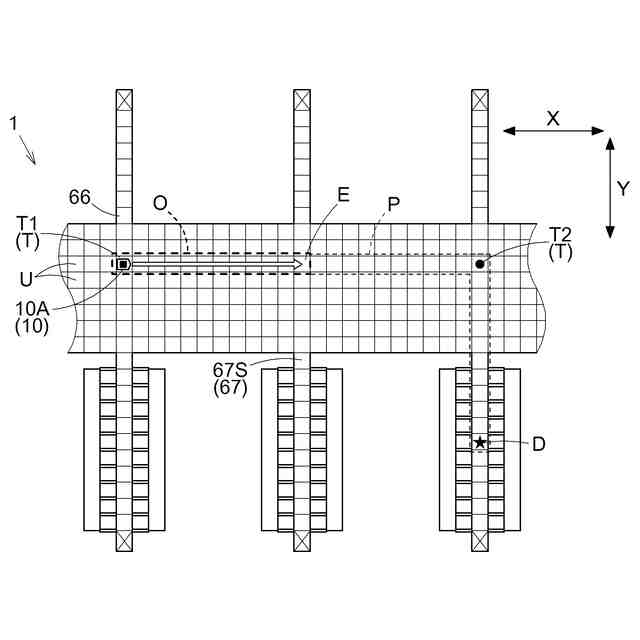
進路予約処理の一例を示す模式図
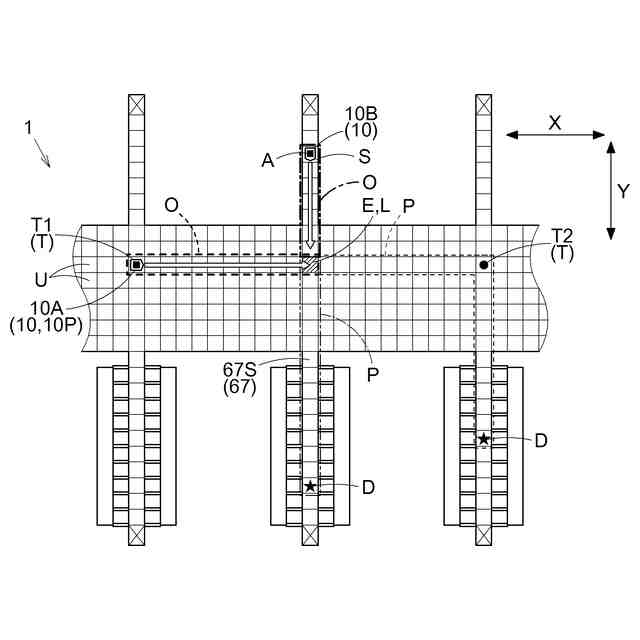
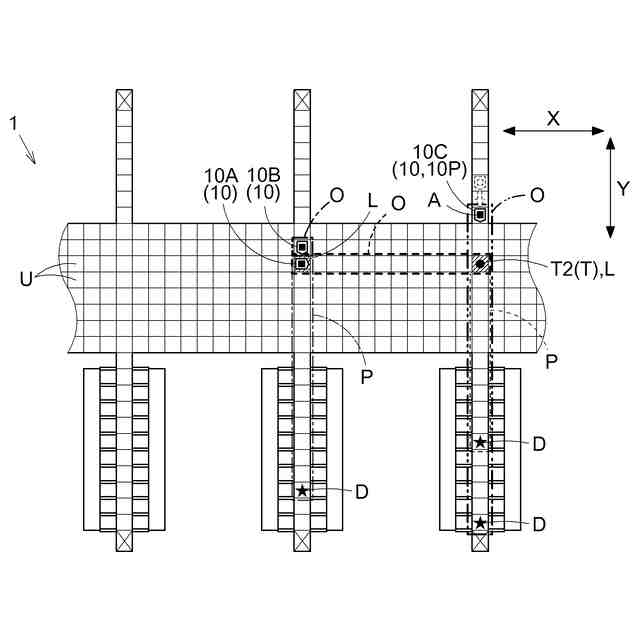
進路予約処理及び交通整理処理の一例を示す模式図
進路予約処理及び交通整理処理の一例を示す模式図
進路予約処理及び交通整理処理の一例を示す模式図
進路予約処理及び交通整理処理の一例を示す模式図
進路予約処理及び交通整理処理の一例を示す模式図
進路予約処理及び交通整理処理の一例を示す模式図
【発明を実施するための形態】
【0010】
物品搬送設備の実施形態について、図面を参照して説明する。本実施形態の物品搬送設備1は、例えば物流センター(例えば物品仕分け設備)において、倉庫から取り出してきて配送先毎に仕分ける対象となる物品Aを搬送するために利用される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
22日前
和研工業株式会社
多連レバー機構
1か月前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
25日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
25日前
エイブリック株式会社
ボルテージレギュレータ
22日前
トヨタ自動車株式会社
工作機械の制御装置
23日前
トヨタ自動車株式会社
工作機械の制御装置
24日前
株式会社やまびこ
走行制御装置
10日前
株式会社ダイフク
物品搬送設備
23日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
4日前
トヨタ自動車株式会社
自律走行装置
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
22日前
株式会社ダイヘン
搬送車
22日前
株式会社ダイヘン
搬送車
22日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
22日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
診断装置
8日前
井関農機株式会社
作業車両
18日前
ミツミ電機株式会社
多方向入力装置
28日前
ミツミ電機株式会社
多方向入力装置
28日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
28日前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
25日前
ミツミ電機株式会社
多方向入力装置
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































