TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012345
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115113
出願日
2023-07-13
発明の名称
制御システム及び制御方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250117BHJP(制御;調整)
要約
【課題】移動体をよりスムーズに自律移動させることである。
【解決手段】少なくとも一台以上の自律移動体と、前記自律移動体に制御指示を行うシステム制御手段と、を有する制御システムであって、前記システム制御手段は、経路決定手段で決定した経路情報と、前記経路決定手段で決定した経路情報に含まれる空間についての空間情報とを、第1ネットワーク接続手段によって送信し、前記自律移動体は、第2ネットワーク接続手段によって受信した経路情報に含まれる経路通りに前記自律移動体を移動させるよう、駆動手段を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも一台以上の自律移動体と、前記自律移動体に制御指示を行うシステム制御手段と、を有し、
前記システム制御手段は、
空間の状態を示す空間情報を固有識別子で管理するフォーマットデータベースと、
前記自律移動体の移動における出発地から目的地までの経路についての経路情報を、前記フォーマットデータベースで管理する空間情報を用いて探索し決定する経路決定手段と、
前記自律移動体との間でデータの送受信を行う第1ネットワーク接続手段と、
前記システム制御手段の全体の制御を行う第1制御手段と、
を有し、
前記自律移動体は、
前記システム制御手段との間でデータの送受信を行う第2ネットワーク接続手段と、
前記自律移動体の周囲の空間についての空間情報を検出する検出手段と、
前記自律移動体を駆動する駆動手段と、
前記自律移動体の全体の制御を行う第2制御手段と、
を有し、
前記第1制御手段は、前記経路決定手段で決定した経路情報と、前記経路決定手段で決定した経路情報に含まれる空間についての空間情報とを、前記第1ネットワーク接続手段によって送信し、
前記第2制御手段は、前記第2ネットワーク接続手段によって受信した経路情報に含まれる経路通りに前記自律移動体を移動させるよう、前記駆動手段を制御する、
ことを特徴とする制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記第2制御手段は、前記第2ネットワーク接続手段によって受信した空間情報が、前記検出手段で検出した空間情報と異なる場合は、前記検出手段で検出した空間情報を前記第2ネットワーク接続手段によって送信し、
前記第1制御手段は、前記第1ネットワーク接続手段によって受信した空間情報で前記フォーマットデータベースを更新する、
ことを特徴とする請求項1に記載の制御システム。
【請求項3】
前記第2制御手段は、前記第2ネットワーク接続手段によって受信した空間情報が、前記自律移動体の移動が困難な場合は、前記第2ネットワーク接続手段によって受信した経路情報の再探索を要請する、
ことを特徴とする請求項2に記載の制御システム。
【請求項4】
前記空間は、緯度/経度/高さによって定義される、
ことを特徴とする請求項1に記載の制御システム。
【請求項5】
前記空間情報は、地物・地形情報、気象情報、通信情報、人流情報、飛行物情報、及び車両情報を含む、
ことを特徴とする請求項1に記載の制御システム。
【請求項6】
少なくとも一台以上の自律移動体と、前記自律移動体に制御指示を行うシステム制御手段と、を制御する方法であって、
前記システム制御手段を制御する方法は、
前記自律移動体の移動における出発地から目的地までの経路についての経路情報を、空間の状態を示す空間情報を固有識別子で管理するフォーマットデータベースで管理する空間情報を用いて探索し決定する経路決定工程と、
前記自律移動体との間でデータの送受信を行う第1ネットワーク接続工程と、
前記システム制御手段の全体の制御を行う第1制御工程と、
を有し、
前記自律移動体を制御する方法は、
前記システム制御手段との間でデータの送受信を行う第2ネットワーク接続工程と、
前記自律移動体の周囲の空間についての空間情報を検出する検出工程と、
前記自律移動体を駆動する駆動工程と、
前記自律移動体の全体の制御を行う第2制御工程と、
を有し、
前記第1制御工程は、前記経路決定工程で決定した経路情報と、前記経路決定工程で決定した経路情報に含まれる空間についての空間情報とを、前記第1ネットワーク接続工程によって送信し、
前記第2制御工程は、前記第2ネットワーク接続工程によって受信した経路情報に含まれる経路通りに前記自律移動体を移動させるよう、前記駆動工程を制御する、
ことを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム及び制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、世界では自律走行モビリティや空間認識システムなどの技術革新に伴い、異なる組織や社会の構成員の間でデータやシステムをつなぐ全体像(以下、「デジタルアーキテクチャ」という)の開発競争が激化している。日本においてもデジタルアーキテクチャの開発が急務となっている。
【0003】
特許文献1には、位置と当該位置における無線通信品質情報を関連付けて保持し、自律走行する移動体の経路探索に無線通信品質を用いることで、無線通信品質の良好な経路を探索する方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-52486号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の技術では、移動体に対して経路を通知するが、経路上の無線通信品質情報は通知しない。また、移動体において現在の無線通信品質情報を検知して制御システムにフィードバックする手段はない。このため、経路の決定の際に現在の無線通信品質情報を反映させることができず、移動体の移動に支障をきたすおそれがあった。
【0006】
本発明は上記問題に鑑みてなされたものであり、移動体をよりスムーズに自律移動させることを目的とする。
【課題を解決するための手段】
【0007】
本発明の一実施形態の制御システムは、少なくとも一台以上の自律移動体と、前記自律移動体に制御指示を行うシステム制御手段と、を有し、前記システム制御手段は、空間の状態を示す空間情報を固有識別子で管理するフォーマットデータベースと、前記自律移動体の移動における出発地から目的地までの経路についての経路情報を、前記フォーマットデータベースで管理する空間情報を用いて探索し決定する経路決定手段と、前記自律移動体との間でデータの送受信を行う第1ネットワーク接続手段と、前記システム制御手段の全体の制御を行う第1制御手段と、を有し、前記自律移動体は、前記システム制御手段との間でデータの送受信を行う第2ネットワーク接続手段と、前記自律移動体の周囲の空間についての空間情報を検出する検出手段と、前記自律移動体を駆動する駆動手段と、前記自律移動体の全体の制御を行う第2制御手段と、を有し、前記第1制御手段は、前記経路決定手段で決定した経路情報と、前記経路決定手段で決定した経路情報に含まれる空間についての空間情報とを、前記第1ネットワーク接続手段によって送信し、前記第2制御手段は、前記第2ネットワーク接続手段によって受信した経路情報に含まれる経路通りに前記自律移動体を移動させるよう、前記駆動手段を制御する。
【発明の効果】
【0008】
本発明によれば、移動体をよりスムーズに自律移動させることができる。
【図面の簡単な説明】
【0009】
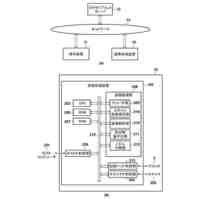
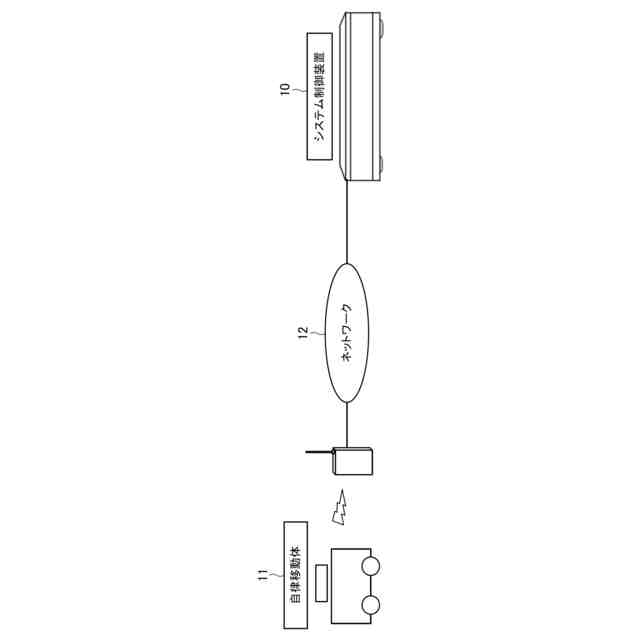
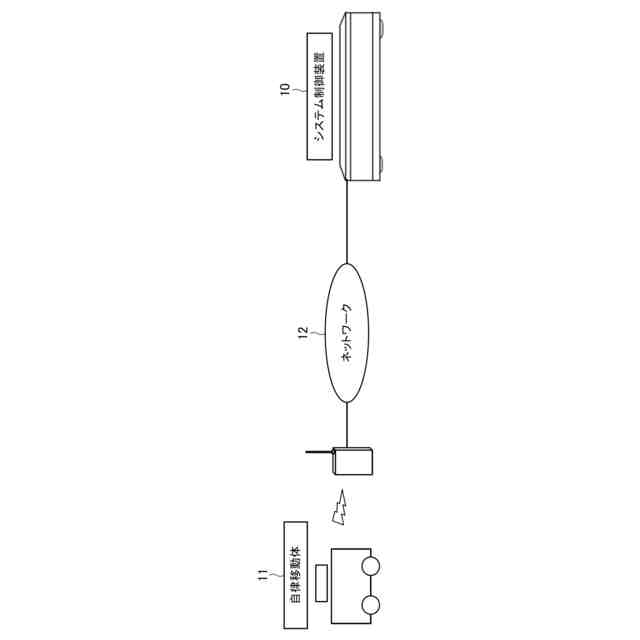
本発明の第1の実施形態に係るシステム構成を示す図である。
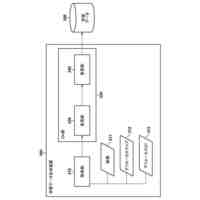
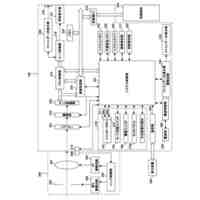
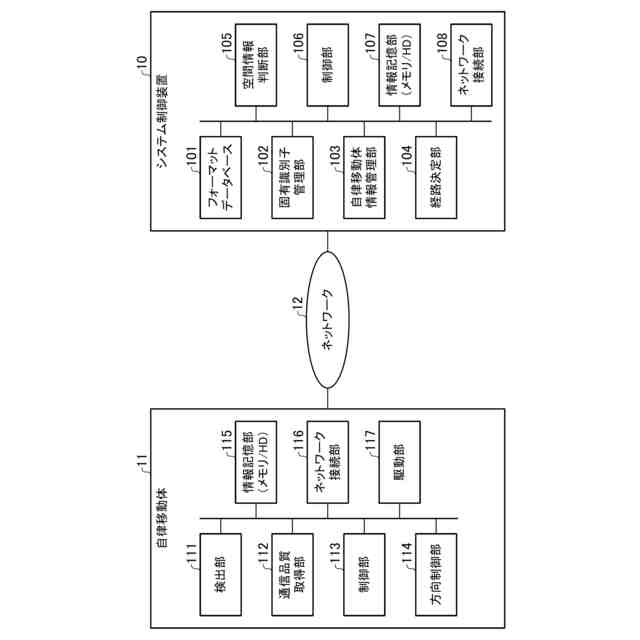
本発明の第1の実施形態に係るシステムを構成する装置の機能構成を示すブロック図である。
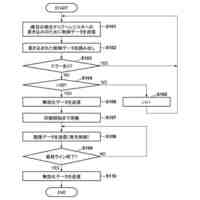
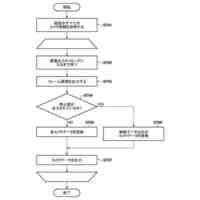
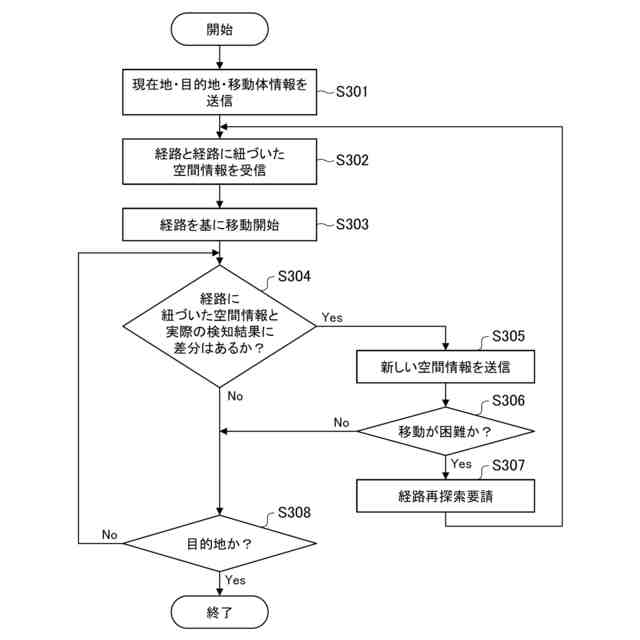
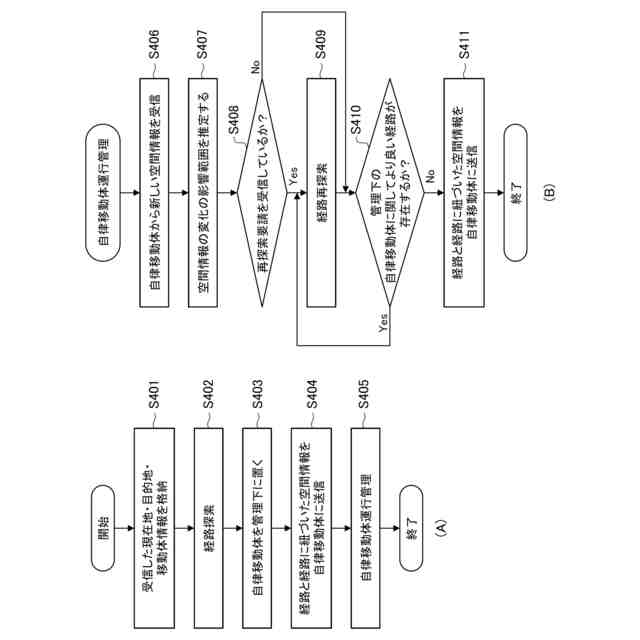
本発明の第1の実施形態に係る自律移動体11のフローチャートである。
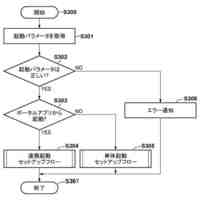
本発明の第1の実施形態に係るシステム制御装置10のフローチャートである。
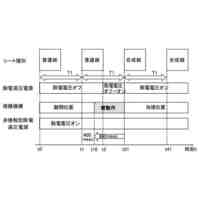
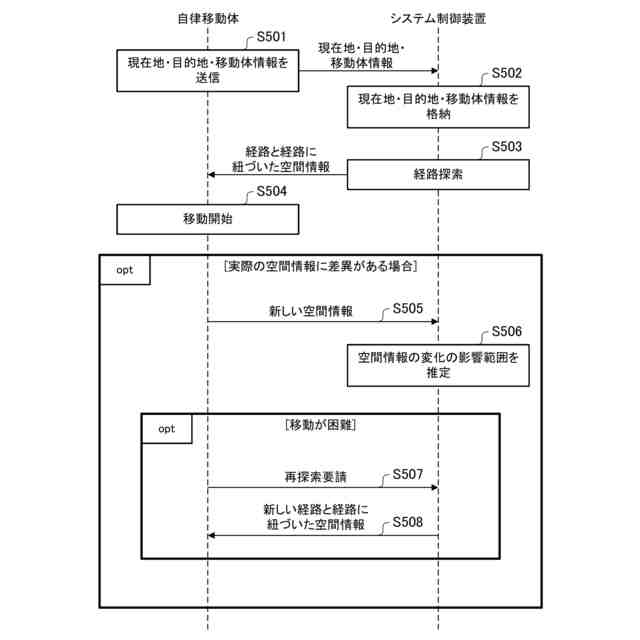
システム制御装置10と自律移動体11のシーケンス図である。
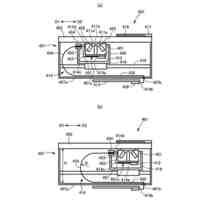
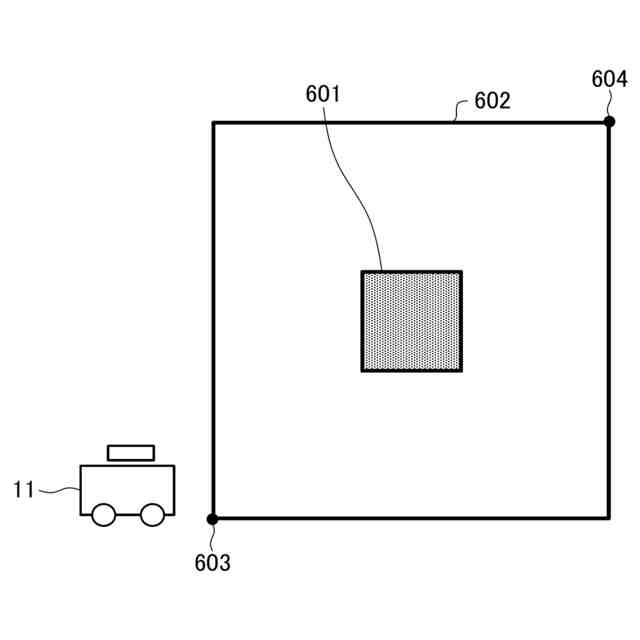
システム制御装置10が提供するサービスが実施される工場のレイアウト図である。
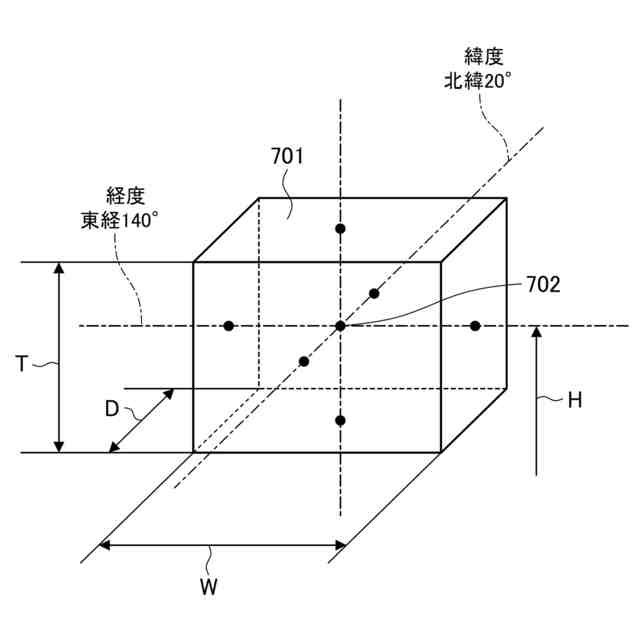
本発明の第1の実施形態に係る空間フォーマットを示す図である。
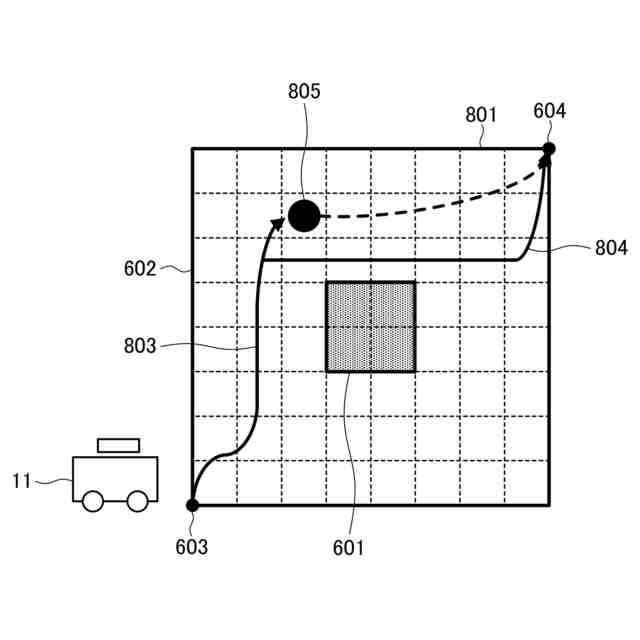
システム制御装置が保持する空間情報よりも実際の空間情報が走行するうえで悪化しているケースを示す図である。
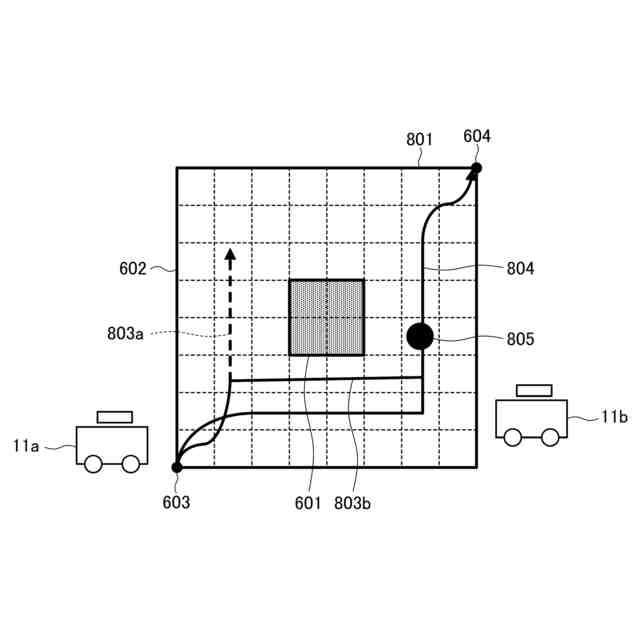
システム制御装置が保持する空間情報よりも実際の空間情報が走行するうえで良化しているケースを示す図である。
システム制御装置が保持する空間情報が不足している又は古いケースを示す図である。
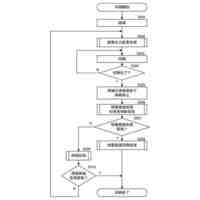
本発明の第2の実施形態において、通信障害の影響範囲を推定するフローチャートである。
本発明の第2の実施形態において、空間情報の影響範囲を隣接する空間の地物・地形情報を用いて推定する方法を示す図である。
本発明の第2の実施形態において、空間情報の影響範囲を移動可能な経路を用いて推定する方法を示す図である。
本発明の第2の実施形態において、空間情報の影響範囲を通信障害発生地点と基地局やアクセスポイント等の位置関係から推定する方法を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。なお、以下の実施の形態は特許請求の範囲に関る本発明を限定するものではなく、また、本実施の形態で説明されている特徴の組み合わせの全てが本発明の解決手段に必須のものとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
情報処理装置
4日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
情報処理装置の筐体
3日前
キヤノン株式会社
管理システム及び方法
今日
キヤノン株式会社
電源及び電源システム
4日前
キヤノン株式会社
管理システム及び方法
3日前
キヤノン株式会社
除電装置、及び画像形成装置
10日前
キヤノン株式会社
画像処理装置、画像処理方法
10日前
キヤノン株式会社
情報処理装置、情報処理方法
4日前
キヤノン株式会社
電子機器及び交換モジュール
10日前
キヤノン株式会社
データ通信装置及び画像形成装置
10日前
キヤノン株式会社
画像読取装置及び画像形成システム
10日前
キヤノン株式会社
情報処理装置、方法およびプログラム
3日前
キヤノン株式会社
画像処理装置、方法およびプログラム
10日前
キヤノン株式会社
情報処理装置、方法およびプログラム
3日前
キヤノン株式会社
情報処理装置、方法およびプログラム
3日前
キヤノン株式会社
通信装置、制御方法、及びプログラム
3日前
キヤノン株式会社
情報処理装置、方法およびプログラム
3日前
キヤノン株式会社
通信装置、制御方法、及び、プログラム
10日前
キヤノン株式会社
管理システム、管理方法、及びプログラム
4日前
キヤノン株式会社
表示制御装置、制御方法およびプログラム
10日前
キヤノン株式会社
情報処理装置、情報処理方法及びプログラム
4日前
キヤノン株式会社
光学制御装置、光学機器およびその制御方法
4日前
キヤノン株式会社
画像処理装置、画像処理方法、及びプログラム
10日前
キヤノン株式会社
撮像装置、撮像装置の制御方法及びプログラム
10日前
キヤノン株式会社
撮像装置、撮像装置の制御方法及びプログラム
10日前
キヤノン株式会社
画像処理装置、画像処理方法、及びプログラム
10日前
キヤノン株式会社
印刷装置、印刷装置の制御方法、及びプログラム
10日前
キヤノン株式会社
撮像装置、撮像装置の制御方法、及び、プログラム
4日前
キヤノン株式会社
印刷ジョブ送信方法、及び印刷ジョブ送信システム
10日前
キヤノン株式会社
印刷ジョブ送信方法、及び印刷ジョブ送信システム
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ