TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025027326
公報種別
公開特許公報(A)
公開日
2025-02-27
出願番号
2023132044
出願日
2023-08-14
発明の名称
画像形成装置
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H02P
6/185 20160101AFI20250219BHJP(電力の発電,変換,配電)
要約
【課題】ロータ停止位置の検知に要する時間を短縮する。
【解決手段】画像形成装置は、モータの少なくとも3つのコイルの内の第1コイルから第2コイルにコイル電流が流れる様に制御して電流値を測定する測定処理を、少なくとも3つのコイルの内の2つのコイルの順列で特定される複数の励磁相それぞれに対して行うことで、ロータ停止位置を検知し、測定処理の第1期間において、第1コイルから第2コイルに向けてコイル電流が流れる様に制御し、第1期間に続く第2期間において、コイル電流を減衰させる様に制御し、第2期間内の第3期間において、コイル電流の一部が、第2コイルの第2端子から少なくとも3つのコイルの内の第1コイル及び第2コイルとは異なる第3コイルの第2端子を介して第3コイルに流れる様に制御する。
【選択図】図6
特許請求の範囲
【請求項1】
搬送路を搬送されるシートに画像を形成する画像形成装置であって、
回転部材と、
前記回転部材を駆動するモータであって、少なくとも3つのコイルを有し、前記少なくとも3つのコイルの第1端子は相互に接続されている、前記モータと、
前記少なくとも3つのコイルの前記第1端子とは異なる第2端子の電位を制御することで前記モータを制御するモータ制御手段であって、前記少なくとも3つのコイルの内の第1コイルから第2コイルにコイル電流が流れる様に制御して前記コイル電流の電流値を測定する測定処理を、前記少なくとも3つのコイルの内の2つのコイルの順列で特定される複数の励磁相それぞれに対して行うことで、前記モータのロータの停止位置を検知する前記モータ制御手段と、
を備え、
前記モータ制御手段は、前記測定処理の第1期間において、前記第1コイルから前記第2コイルに向けて前記コイル電流が流れる様に制御し、前記第1期間に続く第2期間において、前記第1期間に前記第1コイルから前記第2コイルに向けて流れた前記コイル電流を減衰させる様に制御し、前記第2期間内の第3期間において、前記第1コイルから前記第2コイルに向けて流れた前記コイル電流の一部が、前記第2コイルの前記第2端子から前記少なくとも3つのコイルの内の前記第1コイル及び前記第2コイルとは異なる第3コイルの前記第2端子を介して前記第3コイルに流れる様に制御する、画像形成装置。
続きを表示(約 1,600 文字)
【請求項2】
前記モータ制御手段は、前記少なくとも3つのコイルそれぞれを、
コイルの前記第2端子が第1電位の第3端子に接続される第1状態と、
コイルの前記第2端子が前記第1電位より低い第2電位の第4端子に接続される第2状態と、
コイルの前記第2端子が前記第3端子及び前記第4端子の両方に接続されない第3状態と、
のいずれかに設定することで前記モータを制御し、
前記モータ制御手段は、
前記第2期間において、前記第1コイルを前記第2状態に設定し、前記第2コイルを前記第1状態及び前記第2状態に交互に設定し、
前記第2期間の内の前記第3期間とは異なる期間において、前記第3コイルを前記第3状態に設定し、
前記第3期間において、前記第3コイルを前記第1状態及び前記第3状態に交互に設定する、請求項1に記載の画像形成装置。
【請求項3】
前記モータ制御手段は、前記第2期間において、前記第2コイルを前記第1状態に設定してから前記第2状態に設定するまでの第1設定期間が時間の経過と共に大きくなり、その後、前記第1設定期間が時間の経過と共に小さくなる様に制御する、請求項2に記載の画像形成装置。
【請求項4】
前記モータ制御手段は、前記第3期間において、前記第3コイルを前記第1状態に設定してから前記第3状態に設定するまでの第2設定期間が時間の経過と共に大きくなり、その後、前記第2設定期間が時間の経過と共に小さくなる様に制御する、請求項2に記載の画像形成装置。
【請求項5】
前記モータ制御手段は、前記第2期間において、前記第2コイルを前記第1状態に設定してから前記第2状態に設定するまでの第1設定期間が時間の経過と共に小さくなり、その後、前記第1設定期間が時間の経過と共に大きくなる様に制御する、請求項2に記載の画像形成装置。
【請求項6】
前記モータ制御手段は、前記第3期間において、前記第3コイルを前記第1状態に設定してから前記第3状態に設定するまでの第2設定期間が一定となる様に制御する、請求項2に記載の画像形成装置。
【請求項7】
前記モータ制御手段は、経過時間と設定期間との関係を示すデータを有し、前記データが示す前記設定期間に係数を乗ずることで、前記第2期間における前記経過時間と前記第1設定期間との関係を判定し、前記第2期間の終了タイミングにおいて前記第1コイルから前記第2コイルに流れる前記コイル電流の電流値を判定し、前記第2期間の終了タイミングにおいて前記第1コイルから前記第2コイルに流れる前記コイル電流の電流値が0に近づく様に前記係数を更新する、請求項3又は5に記載の画像形成装置。
【請求項8】
前記モータ制御手段は、前記第2期間の終了タイミングにおいて前記第1コイルから前記第2コイルに流れる前記コイル電流の電流値が正の値である場合、前記係数がより大きくなる様に更新し、前記第2期間の終了タイミングにおいて前記第1コイルから前記第2コイルに流れる前記コイル電流の電流値が負の値である場合、前記係数がより小さくなる様に更新する、請求項7に記載の画像形成装置。
【請求項9】
前記モータ制御手段は、
前記第1期間において、前記第2コイルを前記第2状態に設定し、前記第3コイルを前記第3状態に設定し、前記第1コイルを前記第1状態及び前記第2状態に交互に設定する、請求項2に記載の画像形成装置。
【請求項10】
前記モータ制御手段は、前記第1期間において、前記第1コイルを前記第1状態に設定してから前記第2状態に設定するまでの第3設定期間が時間の経過と共に大きくなり、その後、前記第3設定期間が時間の経過と共に小さくなる様に制御する、請求項9に記載の画像形成装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像形成装置におけるモータの制御技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
画像形成装置における回転部材の駆動源として、ロータ位置を検知するためのセンサを搭載しないセンサレスDCブラシレスモータが使用されている。センサレスDCブラシレスモータに対しては、起動時の脱調や逆回転を防ぐため、ロータの停止位置(以下、ロータ停止位置)を検知し、ロータ停止位置に応じた起動処理を行う。特許文献1は、モータの複数の励磁相それぞれに励磁電流(コイル電流)を流し、各励磁相を励磁した際に流れたコイル電流の電流値に基づきロータ停止位置を検知する構成を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2015-104263号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
画像形成装置においては、モータの起動時間を短くすることで、印刷に要する時間を短縮することができる。モータの起動時間を短くするには、ロータ停止位置の検知に要する時間を短くすることが有効である。ロータ停止位置を検知するためには、複数の励磁相それぞれにコイル電流を流して電流値を測定する必要があるが、ある励磁相についての測定は、前の励磁相に対して流したコイル電流の電流値が十分に小さくなった後でなければ開始できない。したがって、ある励磁相に流したコイル電流を素早く減衰させることで、ロータ停止位置の検知に要する時間を短くすることができる。
【0005】
しかしながら、コイル電流の減衰を早めようとすると、電源への回生電流が大きくなり、電源電圧が上昇し得る。電源ラインに接続する電解コンデンサの容量を大きくすることで回生電流を抑えることも可能であるが、コストが高くなり、かつ、画像形成装置が大型化する。
【0006】
本発明は、ロータ停止位置の検知に要する時間を短縮することができる技術を提供するものである。
【課題を解決するための手段】
【0007】
本発明の一態様によると、搬送路を搬送されるシートに画像を形成する画像形成装置は、回転部材と、前記回転部材を駆動するモータであって、少なくとも3つのコイルを有し、前記少なくとも3つのコイルの第1端子は相互に接続されている、前記モータと、前記少なくとも3つのコイルの前記第1端子とは異なる第2端子の電位を制御することで前記モータを制御するモータ制御手段であって、前記少なくとも3つのコイルの内の第1コイルから第2コイルにコイル電流が流れる様に制御して前記コイル電流の電流値を測定する測定処理を、前記少なくとも3つのコイルの内の2つのコイルの順列で特定される複数の励磁相それぞれに対して行うことで、前記モータのロータの停止位置を検知する前記モータ制御手段と、を備え、前記モータ制御手段は、前記測定処理の第1期間において、前記第1コイルから前記第2コイルに向けて前記コイル電流が流れる様に制御し、前記第1期間に続く第2期間において、前記第1期間に前記第1コイルから前記第2コイルに向けて流れた前記コイル電流を減衰させる様に制御し、前記第2期間内の第3期間において、前記第1コイルから前記第2コイルに向けて流れた前記コイル電流の一部が、前記第2コイルの前記第2端子から前記少なくとも3つのコイルの内の前記第1コイル及び前記第2コイルとは異なる第3コイルの前記第2端子を介して前記第3コイルに流れる様に制御する。
【発明の効果】
【0008】
本発明によると、ロータ停止位置の検知に要する時間を短縮することができる。
【図面の簡単な説明】
【0009】
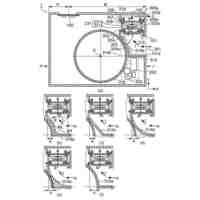
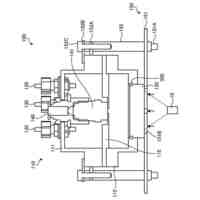
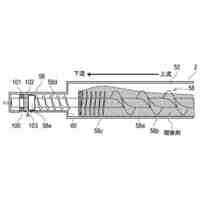
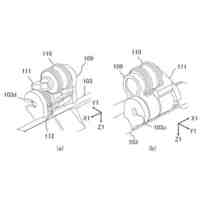
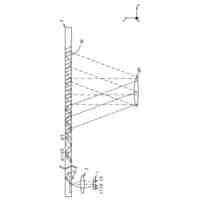
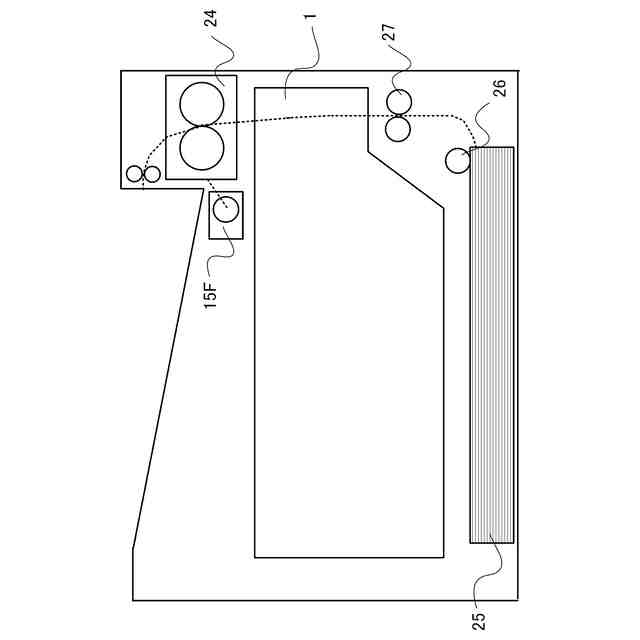
幾つかの実施形態による、画像形成装置の構成図。
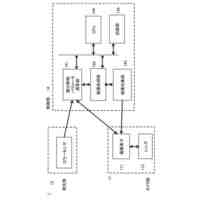
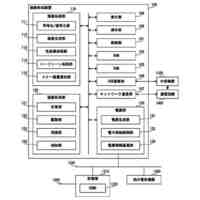
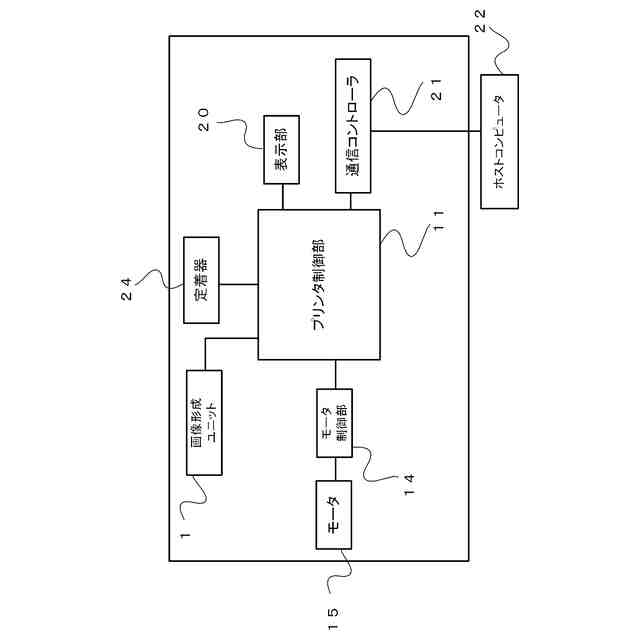
幾つかの実施形態による、画像形成装置の制御構成図。
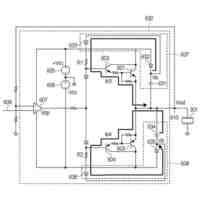
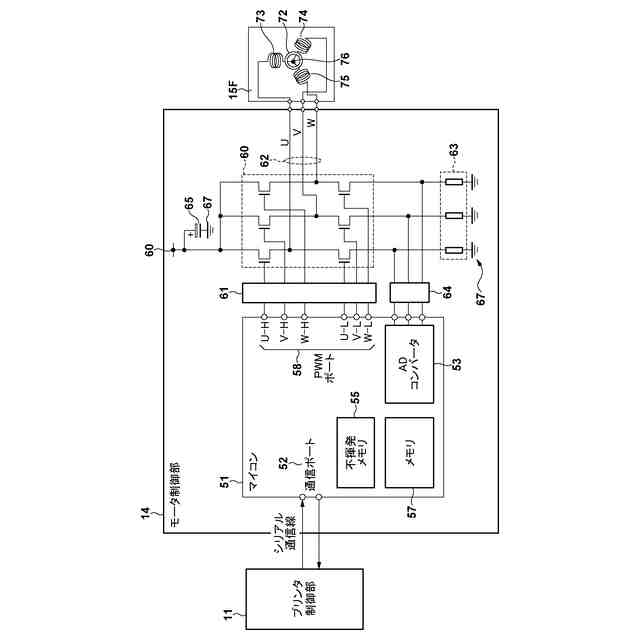
幾つかの実施形態による、モータ制御部の構成図。
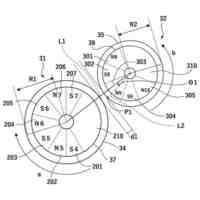
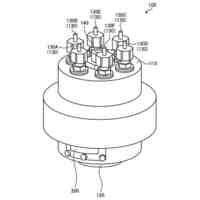
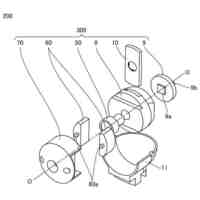
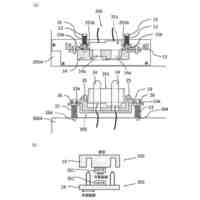
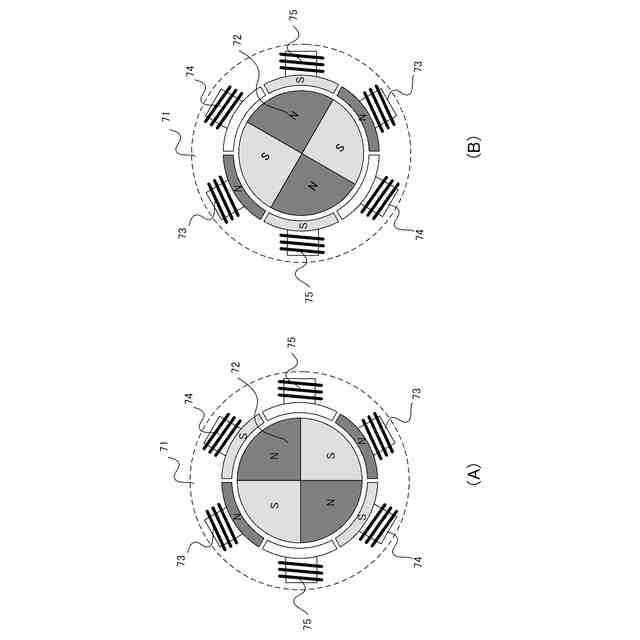
幾つかの実施形態による、モータの構成図。
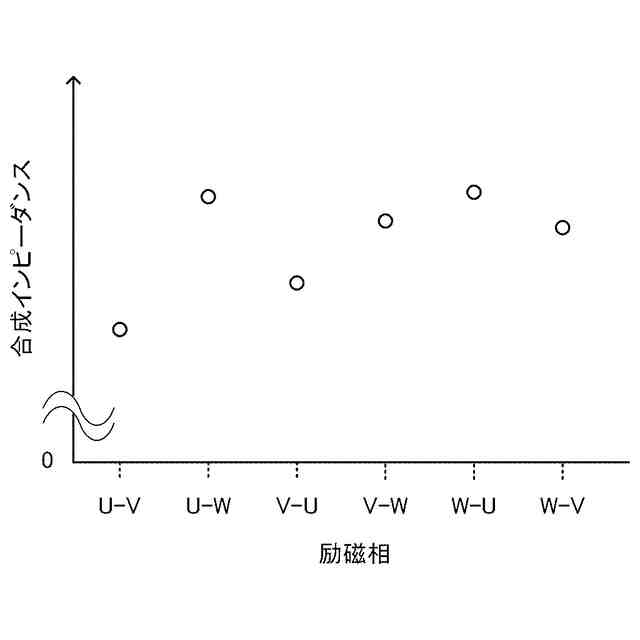
幾つかの実施形態による、励磁相と合成インピーダンスとの関係を示す図。
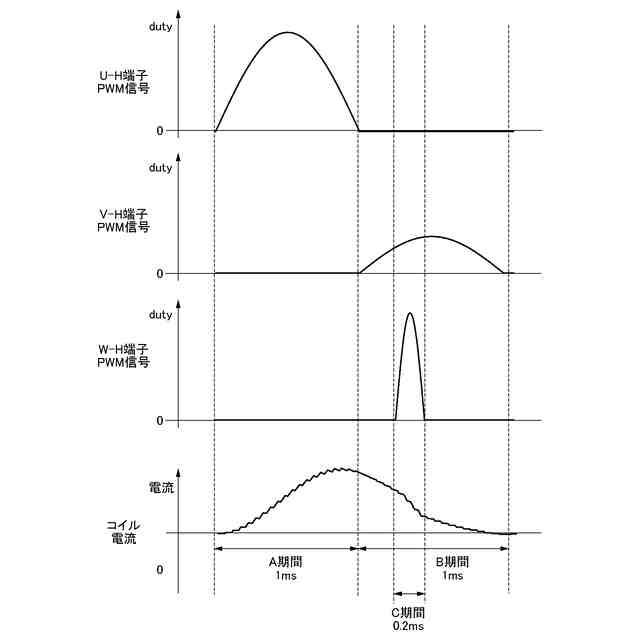
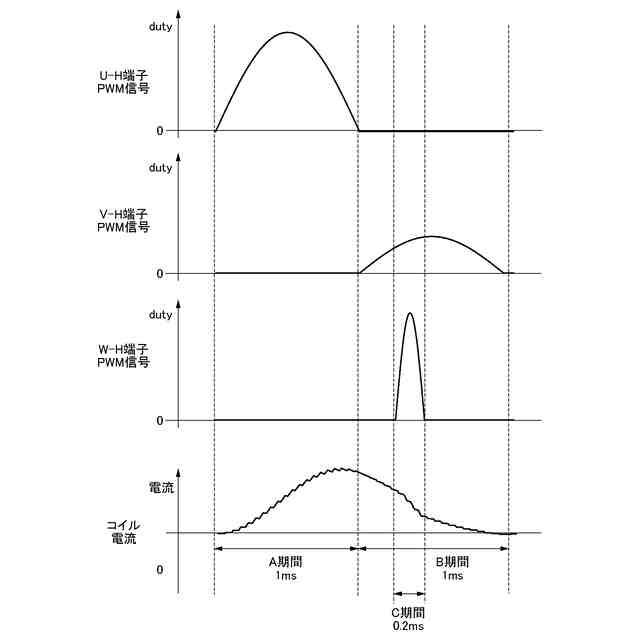
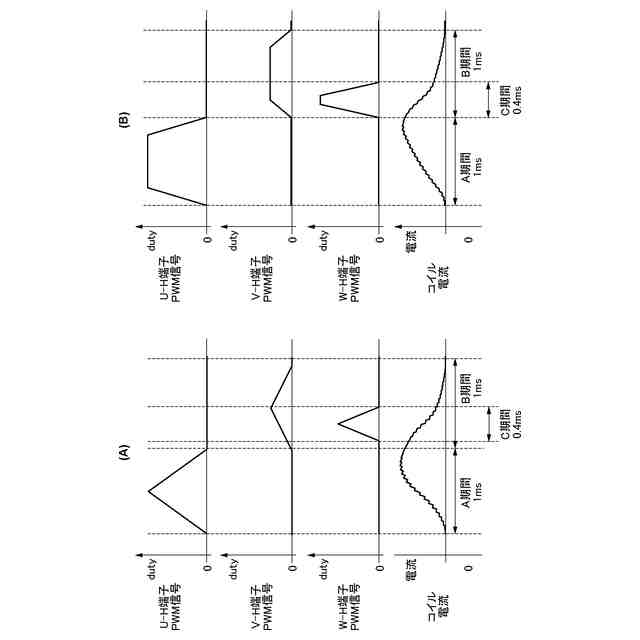
幾つかの実施形態による、PWM信号と、コイル電流と、を示す図。
幾つかの実施形態による、PWM信号と、コイル電流と、を示す図。
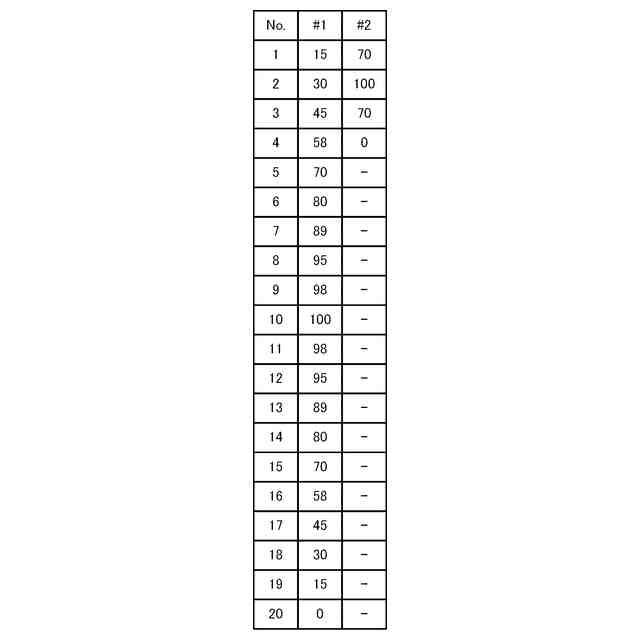
幾つかの実施形態による、デューティデータを示す図。
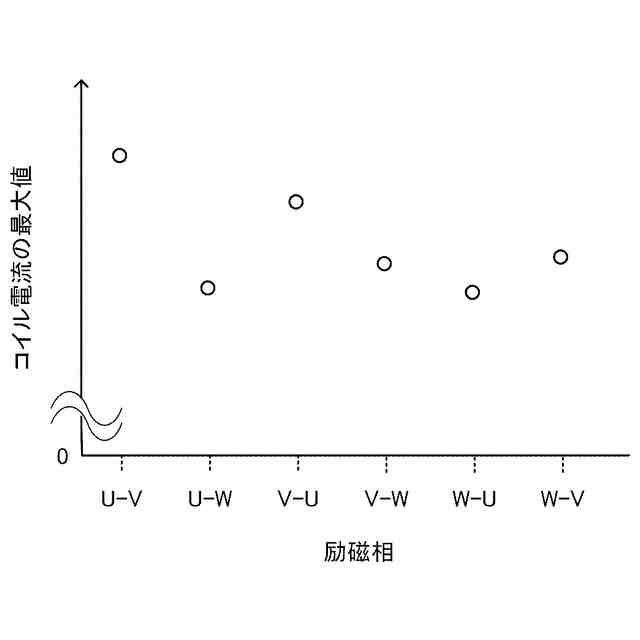
幾つかの実施形態による、励磁相とコイル電流の最大値との関係を示す図。
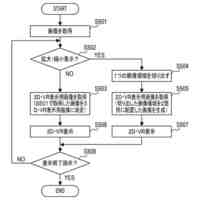
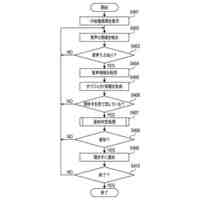
幾つかの実施形態による、ロータ停止位置の検知処理のフローチャート。
幾つかの実施形態による、デューティ係数の更新処理のフローチャート。
幾つかの実施形態による、PWM信号と、コイル電流と、を示す図。
幾つかの実施形態による、デューティデータを示す図。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。実施形態には複数の特徴が記載されているが、これらの複数の特徴の全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
17日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
17日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
8日前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
電子機器
11日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
電子機器
15日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
現像装置
25日前
キヤノン株式会社
培養装置
22日前
キヤノン株式会社
培養装置
22日前
キヤノン株式会社
培養装置
22日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
現像装置
25日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
定着装置
22日前
キヤノン株式会社
記録装置
23日前
キヤノン株式会社
光学装置
23日前
キヤノン株式会社
プログラム
17日前
キヤノン株式会社
プログラム
17日前
キヤノン株式会社
プログラム
17日前
キヤノン株式会社
画像形成装置
24日前
キヤノン株式会社
画像表示装置
23日前
キヤノン株式会社
映像表示装置
11日前
キヤノン株式会社
画像形成装置
23日前
キヤノン株式会社
画像形成装置
24日前
キヤノン株式会社
画像形成装置
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ